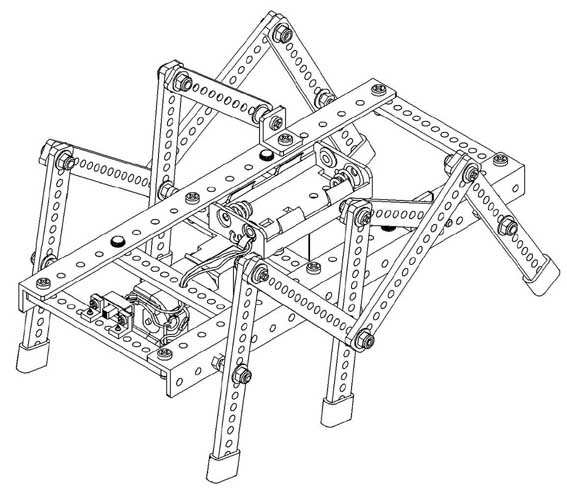
六足拔河机器人的结构从外观上看,比四足竞速机器人多了两只脚,这就使得它的肢体结构与四足竞速机器人有了差别,见图1。为什么把它称作拔河机器人呢?那是因为它的力量大。
同样的电机,同样的能源,为什么六足机器人会比四足机器人的力量大呢?就是因为多了两只脚吗?不是的。因为两个机器人的齿轮变速箱不一样。
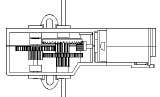
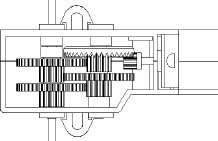
四足竞速机器人的变速箱转速比是58∶1,见图2;六足拔河机器人的变速箱转速比是203∶1,见图3。转速比越小速度越快,转速比越大速度越慢。速度快的力量小,速度慢的力量大。拔河比赛靠的是力量,所以要选择转速比大的齿轮箱。
现在我们就开始进行六足拔河机器人的制作。
动力机构组装
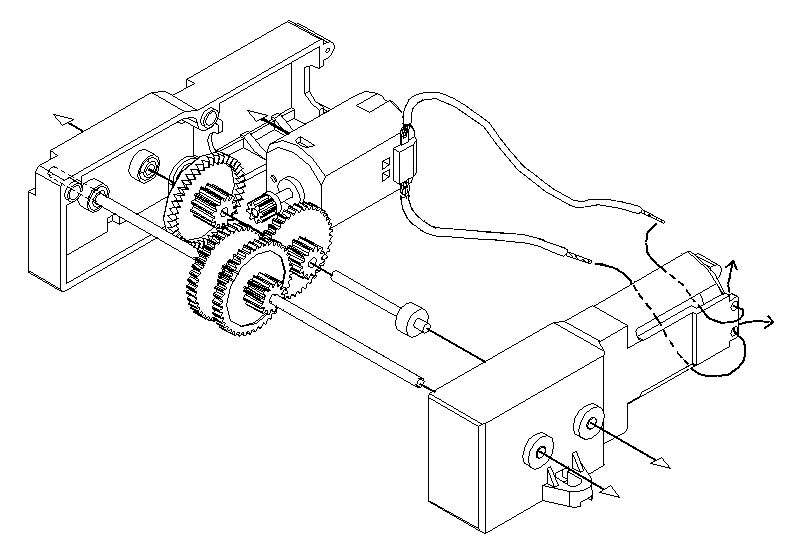
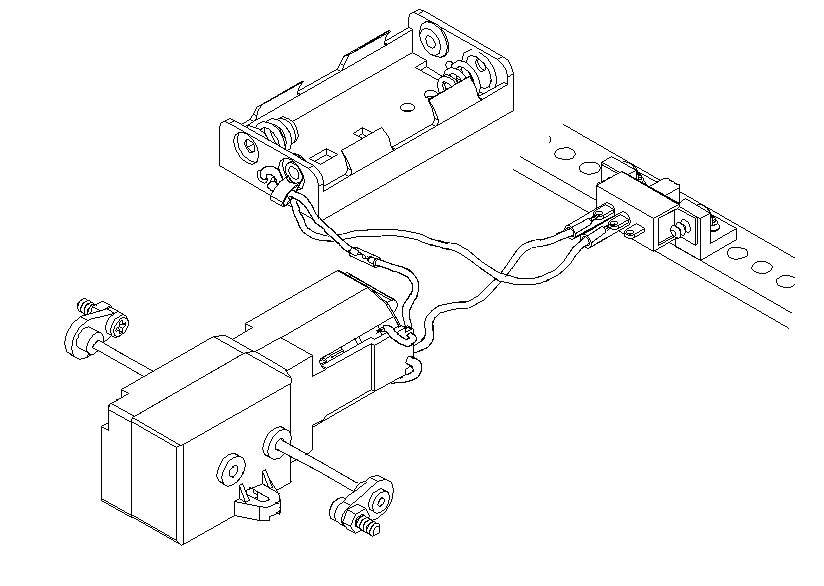
1.照图纸完成电机与203∶1齿轮变速箱的组装,见图4。
2.齿轮箱与扁条固定(见上期)。
3.开关与扁条固定(见上期)。
4.曲柄与变速箱轴的安装(见上期)。
肢体结构组装
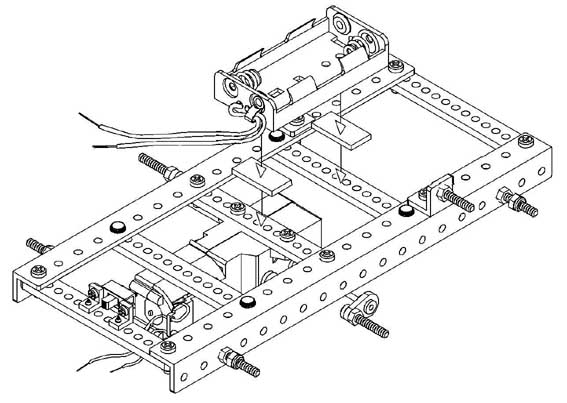
1.将组装好的齿轮变速箱、开关和电池盒装在肢体的支架上,见图5。
2.制作左、右脚,从图1看,左、右脚的结构是一样的,每个侧面都由6根扁条组成,组装时注意扁条的长短。
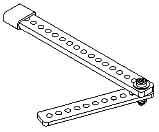
(1)左、右两侧中间的脚,由18孔和11孔扁条组成,见图6。
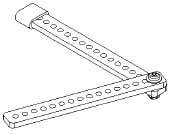
(2)左、右两侧前后的脚,由18孔和16孔扁条组成,见图7。
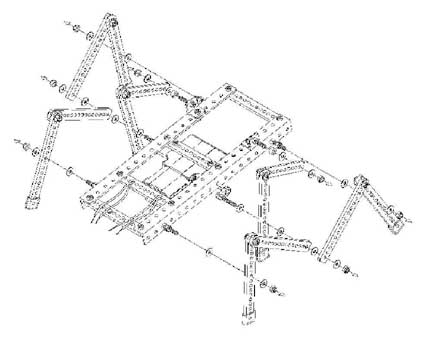
3.将组装好的左、右脚安装在支架上,见图8。安装时要注意:左右两侧前后脚都是“长腿”向外。
电路连接
调 试
1.装上电池。
2.打开开关,机器人以很慢的速度前进。如果机器人有的腿脚不灵活,你要检查一下,可能是制作左右脚时螺丝拧得过紧,只要松一下就可以了。
比 赛
机器人拔河赛可以有两种比赛方式:
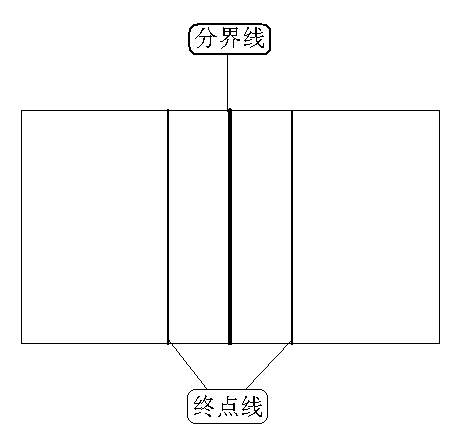
1.在一个平面上(桌面、地面均可),两个机器人背对背,拴上一根绳,在绳子的中央系上红色的线头。比赛场地见图11。 比赛开始时,红色线头对准场地中间的分界线,谁先把红色线头拉过自己的终点线,谁就获胜。
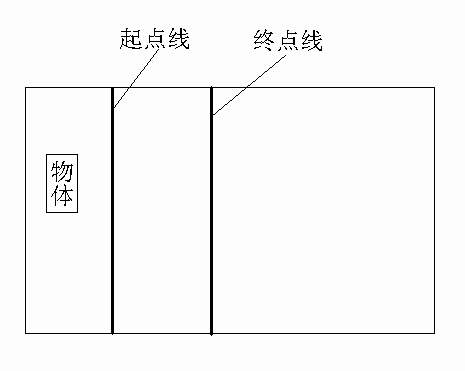
2.在一个平面上,场地见图12。机器人要将物体从起点拖到终点,物体可以是铅笔、橡皮、瓶子、铅笔盒等。比赛获胜首先看谁拖的物体重,谁就是胜利者;在同等重量的情况下,谁用的时间短,谁就获胜。
以上两个场地,起点与终点的距离,没有严格的规定,可根据实际情况自己确定。
文/徐蔼萍
编者注:
本刊读者服务部可为您代购六足拔河机器人,每套邮购价35元。汇款地址:北京崇文区夕照寺街14号A座《无线电》杂志社读者服务部,邮编:100061。汇款时请注明您的电话。