本文结合在无线遥控领域里应用较广的编码器VD5026及解码器VD5027,详细介绍其功能及遥控接收电路的工作原理,供电子爱好者参考。
VD5026、VD5027是CMOS大规模集成电路。前者通过发射系统发射数字编码。二者结合在一起构成一个数字遥控发射接收系统。
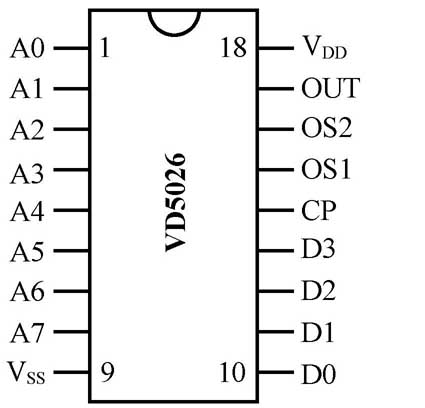
VD5026是DIP18脚双列直插芯片(图1),1~8脚是8位地址编码输入端。每个脚有3个状态,即“0” 、“1”、“悬空”。这样8个脚组合在一起可有6561个地址编码。10~13脚是数据编码输入端,每个脚有2个输入状态,即“0” 、“1”。14脚是发射命令控制端。17脚是编码输出端。当14脚接“0”时,17脚输出由地址编码和数据编码组合在一起的编码。15、16脚外接一个几十到数百千欧的电阻组成一个内置振荡器,振荡频率为1600/R(kHz),式中R的一般取值为100kΩ。
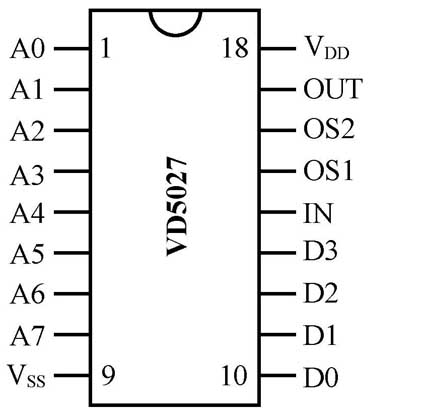
VD5027需与VD5026配合使用,管脚排列图与VD5026相似(图2),也是DIP18脚双列直插芯片。其1~8脚是8位地址编码输入端,使用时其状态与VD5026的1~8脚地址状态完全对应,否则VD5027不译码。14脚是信息码输入端。10~13脚及17脚是译码输出端。15、16脚是内置振荡器电阻输入端,使用时必须与VD5026的15、16脚的电阻保持一致。当VD5027译码到的地址(VD5026的地址编码)与自己的地址编码对应时,接收到的VD5026的10~13脚的输入状态就锁存到VD5027的10~13脚,直到VD5026的10~13脚的输入状态再次改变并被VD5027接收到。同时当VD5027译码到的地址与自己的地址编码对应时,17脚就输出高电平,但不保持,一旦VD5027接收不到该信息,17脚就返回到低电平。根据这一特点,设计者可以根据自己的逻辑需要选择合适的控制端。
根据以上介绍可知,同一个由VD5026组成的遥控发射器,通过选择不同的地址编码,可以控制6561个由VD5027组成的遥控接收器,进而可以控制多达6561个对象,应用非常方便。
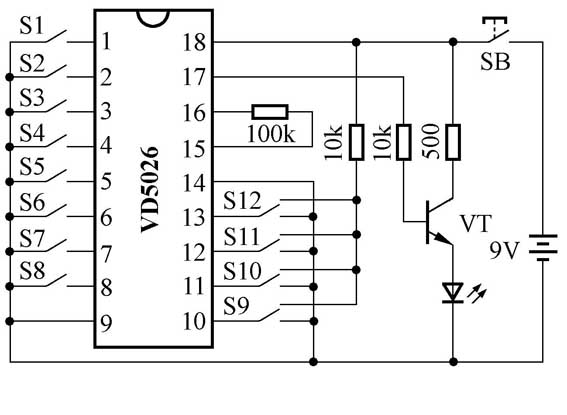
图3是红外遥控发射电路。S1~S8是地址码输入开关,S9~S12是数据码输入开关。SB是发射开关,同时也是电源开关。使用时可以根据控制对象的数量选择S1~S12输入开关。如果控制对象只有一个,S1~S8地址开关就可以省去,VD5026、VD5027的1~8脚可以全悬空或全接地。如果控制对象只有一个且只有两个状态(开、关)时,S9~S12只需要一个就行,一个状态接0,另一状态接1。
图4是红外遥控接收电路。当图3中的发射开关SB按下时,VD5026就把地址码连同数据码一起由17脚输出,并通过红外发射管发射出去。图4中红外接收管接收到信息后,经施密特电路整形后送至VD5027的信息码输入14脚,如果VD5027的地址码与VD5026的地址码完全一致,则VD5027的17脚就会输出高电平,同时VD5026的10~13脚的状态锁存到VD5027的10~13脚。输出信息经三极管放大推动继电器动作,由继电器控制不同的对象。
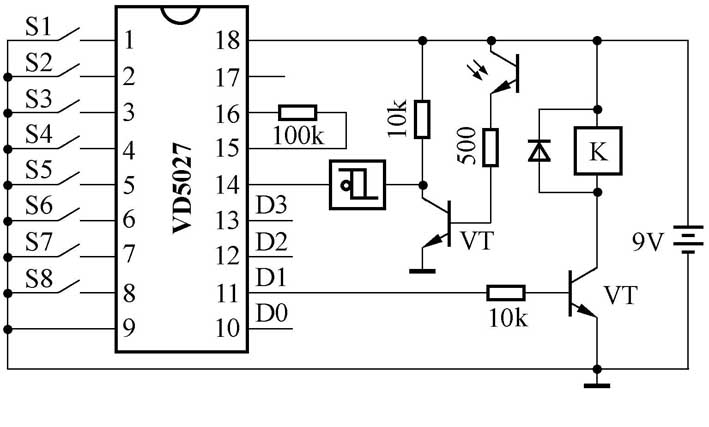
图5是无线电遥控发射机电路原理图。图中TX、C1、C2、VT组成射频发射振荡器。TX电感可设计成一环形天线直接印制在印制电路板上,电感量固定不变,电容C1采用固定电容,这样整个发射回路的频率固定不变,在100~400MHz之间,电路工作稳定,便于调试。发射电路工作时,VD5026的17脚输出的信息(频率约10kHz)去控制由TX、C1组成的振荡电路的工作,振荡信号由电感TX向空间发射。这样电感TX向空间发射的信息包含了频率较低的VD5026输出的信息。接收电路接收到信息后只要把该信号解调出来并由VD5027译码即可。图中电感L2是一固定电感,可以提高发射效率。如果要增加发射距离可按图中虚线部分通过电容C2,加一200mm长天线,通信距离即可成倍整加。
图6是无线电遥控接收机电路原理图,由超再生检波、倒相放大、滤波、整形及译码等电路组成。TX、C1、VT1组成接收电路并把信号放大。电阻R4及二极管VD1组成检波电路,并反馈给三极管VT1进行二次放大。VT2、C7、C6组成倒相放大电路并滤波。R9、C8、LM358组成整形电路。其工作过程是:当A点为正信号时,其中的高频信号直接通过电容C4构成回路,但其中的低频调制信号经过二极管VD1给电容C3充电,电容C3左负右正,当A点为负信号时,该信号与电容C3上的电位同向叠加,通过电容C4再次加到三极管VT1基极进行放大。放大后的信号由B点取出(注意此时B点是负信号),经三极管VT2放大倒相,其中包含的高频信号经电容C7过滤,剩余的调制信号再送至运放LM358整形,D端就得到与 图5中VD5026的17脚一样的波形,并由VD5027译码输出,控制继电器动作。图5、图6组成的发射接收电路调试简单,只需调节接收电路图6中的调谐电容C1即可。
文/何青莲 于文斌 董新生