最近从电视中看到我国中学生自己设计、制作的机器人大赛,也看到国外成人的类似赛事,非常精彩。它与机器人足球赛不同,它是一种遥控战车型机器人比赛。但它也与一般的遥控车模比赛不同:它不是单纯地比赛速度、操纵灵活性,它们各自拥有自己的武器,相互碰撞、厮杀。比赛开始,两队各自操纵无线遥控器使两车相战,你来我往并开动自己的武器,真是斗智、斗勇各显神通,将对方“置于死地”(如将对方掀翻在地、将对方车辆破坏使之不能动弹等)或将对方推入坑内才算获胜(不同的比赛有不同的规则,这里不作详细介绍)。
机器人的武器也是五花八门,有圆盘形电锯,有的直接装上小电钻,有的装有类似推土机的铲子(用来掀翻敌车),也有采用喷火装置、电动机械镐(用来破坏敌车,有较大杀伤力),更有甚者采用释放“麻丝团”的秘密武器,在佯作战败后退时释放出一团麻丝,使麻丝缠住敌车的车轮而使之不能动弹,真是一绝!
更可喜的是参赛的各团队的机器人中都采用了微处理器(μP)或微控制器(μC)作为控制电路的核心,使机器人的性能更为完善。
设计、制作机器人的难度
虽然说参赛的机器人实质上是一种带武器的遥控车,但对中学生来说完成设计、制作这种机器人仍有相当大的难度。这是因为在设计、制作中涉及很多中学生未学过的知识,这包括:机械方面、材料方面、加工方面、电机及拖动方面及电路方面等的知识。另外,它需要必要的加工设备及材料的供应,例如台式车床、钻床、齿轮加工机床等(一般中学不具备这些加工设备);又例如需要少量的各种金属板材,难以从市场中买到。即使请有关单位代加工,则需要机械制图的知识、材料知识(注明材料的种类及型号)及公差的知识等。
学生在设计、制作过程中会碰到各种问题,在解决这些问题过程中可获得各种知识及得到各方面的锻炼。这里将举一些设计巧妙的武器及设计不足的武器,并介绍一些采用了μP或μC后增加的功能。
设计的武器举例
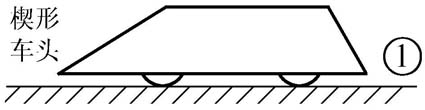
1.楔子形车头设计
一种车头设计成楔子形状也是一种十分有用的武器。它可以利用楔子的斜面楔入敌车的一侧,使敌车的一侧的车轮从斜面上行驶而使敌车倾斜,当敌车的倾斜度较大时会产生翻车(车子的外形如图1所示)。当然,这种车要有足够的动力来楔入敌车,并使敌车在车头斜坡上行驶时不能因敌车压在斜面上使后轮离地而失去动力(车的重心要设计好)。
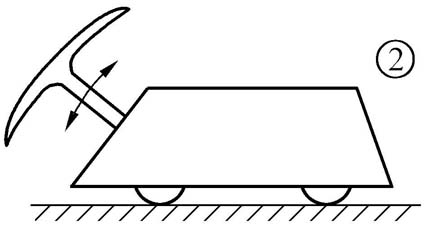
2.电动机械镐
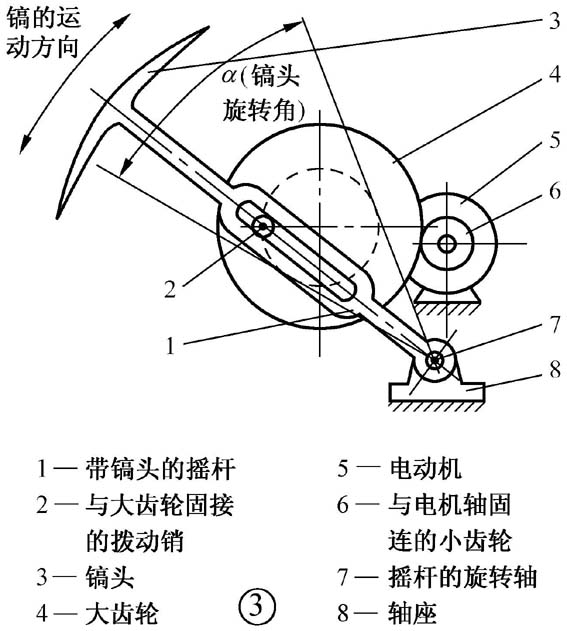
在车上装上一个电动机械镐用来破坏敌车有相当大的威力,其外形如图2所示。它可以挥动镐来砸坏敌车的外部及内部(图3是它的传动原理图)。小齿轮6与直流电动机5的轴固连,小齿轮6与大齿轮4啮合起到减速、增加力矩的功能(实际结构可能是多级齿轮减速装置),在大齿轮4上装有一个拨动销2,拨动销2可在带镐头的摇杆1的滑槽中滑动。当大齿轮4旋转一周,镐上下挥动一次,镐的旋转角度α如图3所示。摇杆1装在轴座8上(通过轴7安装在轴座8上)。这仅仅是一种结构原理图(并非最佳方案)。
3.用小型手电钻作为武器
利用现成的小型手电钻安装在车头作为武器来破坏敌车的想法是好的,但钻头能否将敌车钻一个窟窿却不是十分容易。要在敌车上钻一个孔的条件是钻头必需与钻孔的面垂直,并且最好有一个“充眼”(小锥坑),否则钻头容易在被钻表面上“打转转”,不易钻入;要有一定的垂直压力。因此,在两车相撞时虽然钻头有可能触及敌车,但不一定处于垂直位置,钻头极易因此“打滑”而达不到破坏敌车的目的。另外,手电钻重量较重、工作电压高(需要较多的电池)、耗电大,破坏力并不强。
电 路 方 面
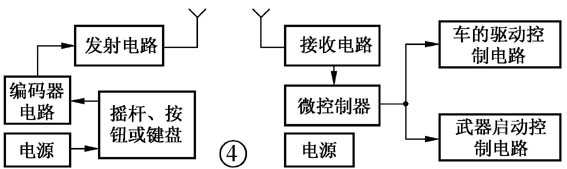
笔者仅从电视中听到机器人中用到μP或μC,并未看到具体电路,因此这里只能给出一个电路框图,如图4所示。它由发射部分及接收部分组成。发射部分由摇杆、按钮或键盘来输入控制信号,经编码器变成脉冲信号后输入发射电路,经调制后将控制信号发射出去。接收部分由接收电路收到调制信号后经解调后将编码信号由μP或μC译码,并由I/O口输出相应的控制信号来控制车的各种运动及武器的动作。
这里重点介绍一下应用了μP或μC后可能会给机器人带来什么功能(笔者并未看到参赛者的电路及了解它们采用了μP或μC后增加了什么功能及在性能上有哪些改进或提高,仅仅是一种设想)。
1.可省去译码器
一般的遥控电路需要编码器及译码器配对使用。采用μP或μC后译码工作可以由μP或μC来担任,因此可省去译码器。
2.它具有较多的通道
一般遥控编/译码器只有4~5个通道,采用μP或μC后可以有更多的I/O,实现更多通道。
3.可输出脉冲宽度调制(PWM)信号
可实现比例控制,使动作更准确、完美,PWM信号可实现车速调节。
4.可方便地减小转弯半径
作战时要求机器人动作灵活,减小转弯半径十分重要。转弯半径大小与车速有关,利用μC或μP的控制,在作急速转弯时自动降速以满足急转弯的动作。
5.实现自动控制
若在机器人中安装了一些传感器,则可以实现自动控制。例如,采用光电传感器来检测敌车的距离(在一定距离时,红外线被反射接收),则可自动启动武器(如火焰喷射或启动其它武器)可以省电及武器有效命中。又例如在车的前方装有力传感器,当与敌车相撞时可检测力的大小,可根据这力的大小来决定是否要避让或采用何种武器(如果有多种武器)。
希望多举行这种比赛
现在我国提倡素质教育来代替应试教育,培养更多的高分多能的学生。在大、中学校中开展这种设计、制作比赛无疑是一种很好的活动,希望能更普遍地参与和普及这种比赛。
(凡文)