无线电遥控具有可控距离远、能穿透墙体等障碍物、操作方便灵活,在生产、生活等方面都有广泛的应用。现以电动汽车模型的遥控电路为例,介绍无线电遥控电路的分析方法。
一、电路图总体分析
1.整机电路结构。图1为电路图,包括发射和接收两部分。接收电路由五个部分组成:(1) IC1构成的无线电接收和解码电路,将发射机的无线电遥控指令解码为A、B、C、D控制信号;(2) 门电路D1、D3、D5、D6将解码电路输出的控制信号变换为前进(A)、左转弯(B)、右转弯(C)、倒退(D)等信号;(3) 门电路D2、D4构成的逻辑互锁,保证电路不会同时执行“前进”和“后退”指令;(4) D型触发器D7、D8构成正、反转控制电路,控制驱动电路的工作状态;(5) 555时基电路IC2~IC5构成左、右直流电机驱动电路,使之正转、反转或停转。
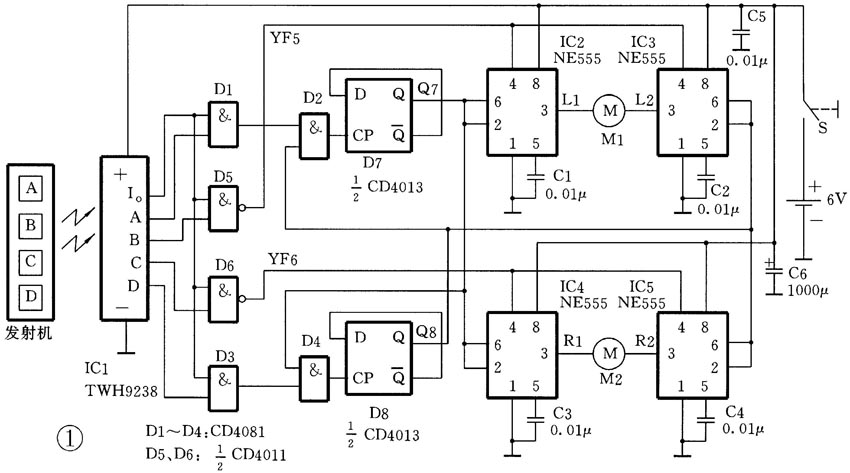
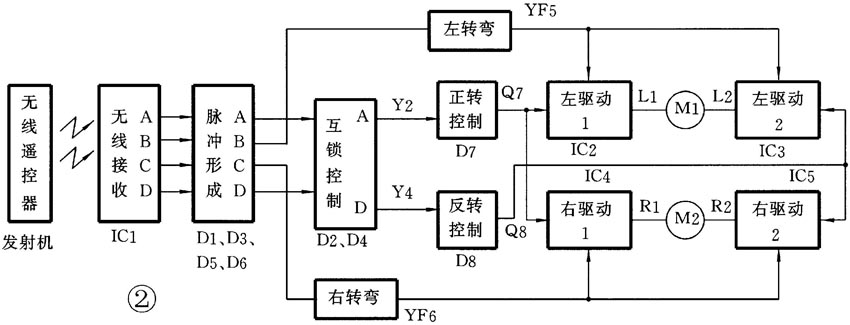
2.简要工作原理。控制原理如图2方框图所示。停车时,左、右各两个驱动器的输出L1、L2、R1、R2均为0,左、右直流电机M1、M2停转。
遥控器发出“A(前进)”指令时,接收解码器的A输出端为1,经与门D1、D2使D7双稳态触发器翻转,Q7为0,又使555施密特触发器IC2、IC4输出端L1、R1均变为1,电机M1、M2正转,车模前进。
遥控器发出“D(倒退)”指令时,接收解码器的D输出端为1,经与门D3、D4使D8双稳态触发器翻转,Q8为0,则使555施密特触发器IC3、IC5输出端L2、R2均变为1,电机M1、M2反转,车模倒车。
在车模运行(前进或倒退)中,当遥控器发出“B(左转弯)”指令时,接收解码器的B输出端为1,与非门D5输出端YF5为0,这时IC2、IC3的复位端④脚为0,IC2、IC3被强制复位,L1、L2均为0,电机M1停转(即左后轮停转),使车模左转弯。
同理,在车模运行中,遥控器发出“C(右转弯)”指令时,接收解码器的C输出端为1,与非门D6输出端YF6为0,IC4、IC5被强制复位,其输出端R1、R2均变为0,电机M2停转(即右后轮停转),使车模右转弯。
二、主要单元电路分析
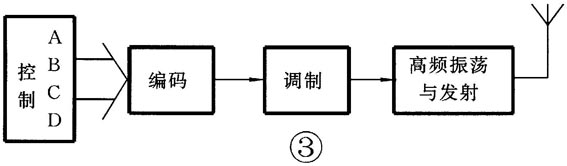
1.无线编码发射电路。遥控器的遥控距离可达100m,是4位微型遥控器,包括控制部分(有A、B、C、D四个按键)、编码、调制、高频振荡与发射电路以及内藏式天线,如图3方框图所示。
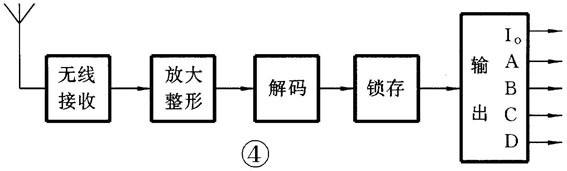
2.无线接收解码电路。采用与微型遥控器相配套的接收模块TWH9238(IC1),如图4方框图所示,由内藏式天线和无线接收、放大整形、解码、锁存和输出电路组成,有A、B、C、D四个锁存输出端和I O一个非锁存输出端。A、B、C、D四个锁存输出端对应遥控器上的A、B、C、D四个按键,任何一个按键按下时I O均输出一窄脉冲。
3. 脉冲形成电路。由于控制逻辑的需要,应将无线接收解码电路的锁存输出转变为非锁存脉冲输出。如图1所示,当A、B、C、D任一键按下时,其相应端为1,但由于I O端仅在按键按下的时间内为1,因此经过与门或与非门后,A、B、C、D端输出的便是与按键按下时间相等的控制脉冲。遥控器上A键按下时D1输出为1;B键按下时D5输出为0;C键按下时D6输出为0;D键按下时D3输出为1。
4. D型双稳态触发器。正转、反转控制电路均采用了D触发器构成的双稳态触发器,由时钟脉冲CP的上升沿触发,由于数据输入端D直接接在本触发器的Q输出端,因此每输入一个CP脉冲,其输出端(Q或Q)的状态就翻转一次,波形见图5(右)。
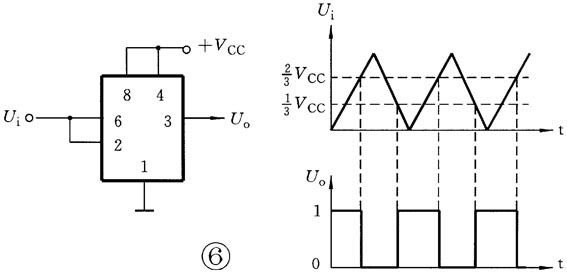
5. 555施密特触发器及驱动电路。将555时基电路的置1、置0触发端②、⑥脚接在一起作为输入端,便构成了施密特触发器,当输入电压Ui≥2/3VCC时输出端U\(_{o}\)为0;当Ui≤1/3V\(_{CC}\)时输出端U\(_{o}\)为1。电路及波形如图6所示。
由于555时基电路具有200 mA的驱动能力,因此可以直接驱动车模上的直流电机,使得驱动电路完全集成化。驱动电路由四个555施密特触发器构成。IC2、IC3驱动左轮,当L1为1时,电机M1正转,左轮前进;L2为1时,M1反转,左轮倒退;当L1、L2皆为0时,M1停转,左轮不动。同时,IC4、IC5驱动右轮,控制右轮的前进、倒退和停转。
6.逻辑互锁控制电路。车模不可能同时处于既前进又后退的状态,为此设置了由与门D2、D4构成的逻辑互锁电路。控制“前进”指令传输的与门D2受反转控制双稳态触发器D8控制,控制“倒退”指令传输的与门D4受正转控制双稳态触发器D7控制。当车模处于前进状态时,D7输出端Q7为0,封锁了D4,使得“倒退”指令D不能通过。当车模处于倒退状态时,D8输出端Q8为0,封锁了D2,使得“前进”指令A不能通过。从而保证电路不会同时执行“前进”和“倒退”指令。
三、制作与操作要点
1.制作。控制电路等置于汽车模型内(为防止无线电遥控信号被屏蔽,车身应是非金属材料),内部结构见图7。左、右后轮为主动轮,分别由电机M1、M2通过蜗杆蜗轮减速器驱动(也可用齿轮组减速)。左、右前轮为从动轮。TWH9238远离大金属件,以免影响遥控效果。
2.操作。无线电遥控器可控制车模前进、左、右转弯、倒车、停车等。操作过程如下:按一下遥控器上的A键,车模的左、右两后轮均正转,车辆前进;再按一下A键,两后轮均停转,车模停车。按一下D键,左、右两后轮均反转,车模倒车;再按一下D键,两后轮均停转,车模停止倒车。在车辆运行中(前进、倒车均可),如按下遥控器上的B键(按住不放),左后轮停转,车模左转弯;松开B键,车模恢复直行。如按下C键(按住不放),右后轮停转,车模右转弯;松开C键,车模恢复直行。
(门宏)