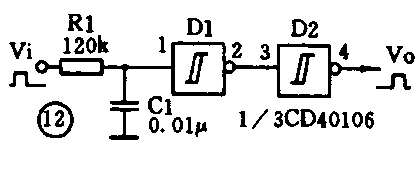
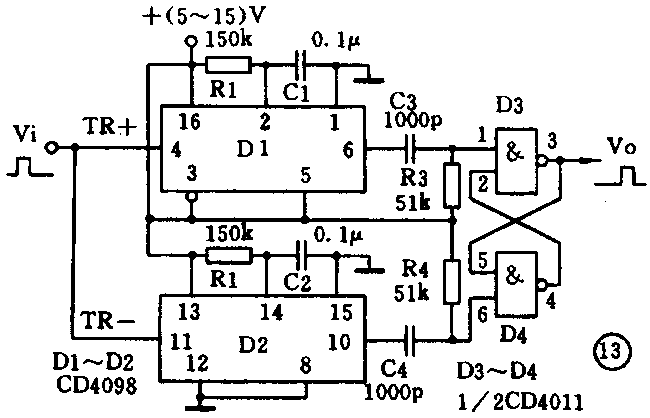
(门宏)图12、图13均为脉冲延迟电路,其输出脉冲相对于输入脉冲在时间上整体向后延迟了一定时间,延迟量由RC定时网络决定。图12是用施密特触发器构成的脉冲延迟电路,延迟时间1ms。在D1的输入端接有R1、C1积分电路,利用积分电容的充放电作用,使输入脉冲延迟。该延迟电路的最大延迟时间受输入脉冲宽度的限制,即延迟时间必须小于输入脉冲宽度,否则不能正常工作。图13是采用单稳态触发器和与非门构成的脉冲延迟电路,其特点是延迟时间可以大于输入脉冲宽度。输入脉冲的上升沿触发单稳态触发器D1进入暂稳态,输出端⑥脚变为“1”,暂稳态输出脉冲宽度由定时元件R1、C1决定。D1的暂稳态结束时,⑥脚由“1”变为“0”,经C6、R3微分产生一负脉冲,使由与非门D3、D4组成的RS触发器置“1”,输出端(D3的③脚)变为“1”。输入脉冲结束时,其下降沿触发单稳态触发器D2进入暂稳态,输出端⑩脚变为“1”。由于D2定时元件取值与D1完全相同,所以D2的暂态脉宽与D1完全相同。暂稳态结束时,⑩脚又变为“0”,经C4、R4微分产生一个负脉冲,使RS触发器置“0”,D3③脚回复为“0”。可见,电路输出的脉冲宽度与输入脉冲相等,但在时间上向后延迟了10ms(按图13的参数)。改变R1、C1和R2、C2,可改变延迟时间。
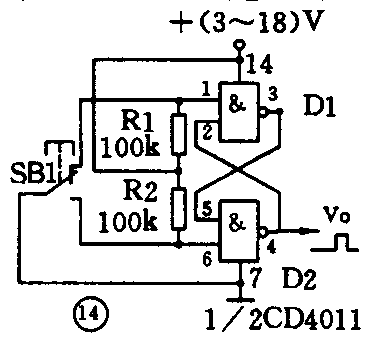
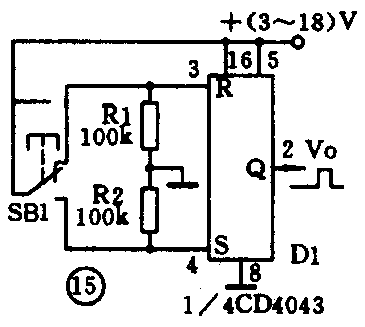
图14是采用CMOS与非门构成的消抖电路,图15是采用RS触发器构成的消抖电路,它们的作用是消除机械开关触点抖动所造成的波形不稳定。当按下SB1,时,输出端(图14中D2的④脚、图15中D1的②脚)为“1”,这时尽管SB1机械触点抖动,只要机械触点不返回上端,则对输出波形无影响,输出仍为“1”;当松开SB1时,输出端变为“0”,并不受SB1机械触点抖动的影响。每按动一次SB1,电路输出一个理想的单脉冲信号。
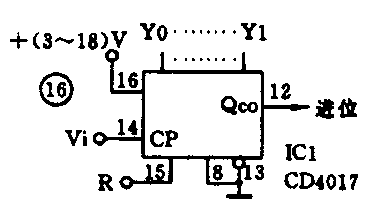
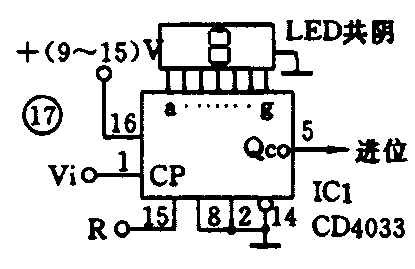
图16和图17是两种十进制计数器。图16是采用十进制计数/分配器CD4017构成的十进制计数器,计数状态由CD4017的十个译码输出端Y0~Y9显示。每一时刻,Y0~Y9中只有一个输出端为“1”,且与计数个数相对应,其余输出端皆为“0”。每输入10个脉冲,进位输出端Q\(_{co}\)就输出一个进位脉冲。图17是采用十进制计数/7段译码器CD4033构成的十进制计数器,计数状态由7段LED共阴数码管显示,直观明了。每计10个脉冲,则Qco端输出一个进位脉冲。图16、17中,输入信号V\(_{i}\)由CP端输入。R为清零端,R=1时,计数器清“0”;正常计数时,应使R=0。需要多位计数时,输入信号Vi由最低位的CP端输入,将低位的Q\(_{co}\)端接至高一位的CP端即可。
十一、六进制计数器
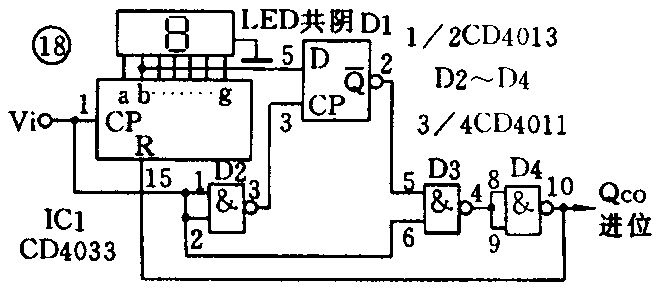
图18为采用CD4033等构成的六进制计数器。D触发器D1和与非门D2~D4构成附加控制电路。CD4033对1~5个脉冲正常计数,当第6个脉冲到来时,附加控制电路(D4的⑩脚)输出一个“1”脉冲,使CD4033计数器复“0”,同时送出一个进位脉冲。下一个脉冲到来时,计数器重新开始计数。六进制计数器可用于分、秒的十位计数。
十二、秒脉冲发生器
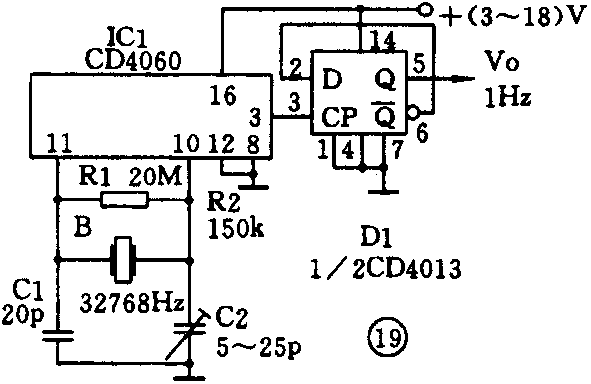
图19是采用CD4060构成的石英晶体秒脉冲发生器。CD4060是CMOS14位二进制串行计数器,内部电路包括两部分:(1)振荡器(需外接晶体或阻容振荡元件);(2)14级二进制分频器。利用CD4060制作秒脉冲发生器,具有电路简洁、工作可靠、成本低、精度高的特点。CD4060⑩、脚的内部门电路,与外接的晶体等元件一起构成典型的晶体振荡器,振荡频率由晶体B决定(32768Hz),晶体B工作在非联谐振状态,呈感性,与电容C1、C2组成反馈网络,调节C2可微调振荡频率。32768Hz的振荡信号由CD4060内部的14级二进制分频器分频后,从③脚输出2Hz脉冲信号。再由D1进行一次二分频,即得到1Hz的标准秒脉冲信号。
十三、数控增益放大器
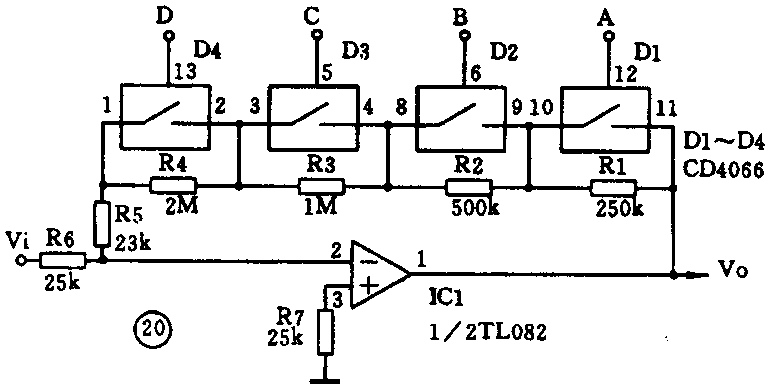
图20是采用四双向模拟开关CD4066和运算放大器组成的数控增益放大器。该放大器用数控电阻网络代替了运放的反馈电阻,而数控电阻网络的阻值,由4位二进制数控制,从而实现了由4位二进制数控制增益(放大倍数)的放大电路。双向模拟开关D1~D4及电阻R1~R5构成数控电阻网络,数控输入端A、B、C、D接二进制控制数,某位控制数为“1”时,使该位模拟开关导通,将相应的电阻短接,从而达到电阻网络数字控制的目的。表1为二进制控制数与放大器增益(放大倍数)的对应关系。
表1:
控制数 放大
DCBA 倍数
0000 150
0001 140
0010 130
0011 120
0100 110
0101 100
0110 90
0111 80
1000 70
1001 60
1010 50
1011 40
1100 30
1101 20
1110 10
1111 1
十四、数控频率振荡器
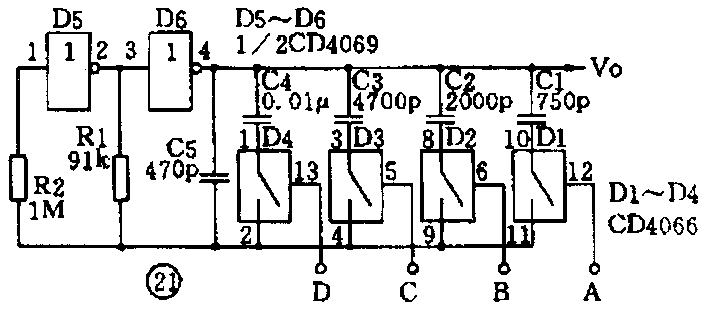
图21为数控频率多谐振荡器电路,其振荡频率由4位二进制数控制。图中,双向模拟开关D1~D4及电容C1~C4组成数控电容网络,并接在振荡电容C5上,C1~C4是否接入电路取决于D1~D4的导通与否,而D1~D4的导通与否由A、B、C、D四个控制端的二进制数控制,在不同的4位二进制数控制下,C1~C4的接入状态相应地发生变化,也就改变了振荡频率。4位二进制数与振荡频率的一一对应关系见表2。
表2:
控制数 振荡频率
DCBA (Hz)
0000 10k
0001 4k
0010 2k
0011 1.5k
0100 1k
0101 850
0110 700
0111 600
1000 500
1001 450
1010 400
1011 360
1100 330
1101 300
1110 290
1111 280