编者按:随着遥控技术的发展,使用无线电遥控器的设备越来越多。为了满足这一需要,同时也应广大读者的要求,本期特刊出几种无线电遥控电路及遥控组件,以便读者能制作出更多简单实用的遥控器。因频率是人类共享的一种宝贵资源,所以读者制作时应严格遵守中华人民共和国无线电管理条例。
本文介绍的遥控自动循迹车既可无线电遥控,又可自动循迹运行,遥控优先。前进、倒退、左转弯、右转弯、停车等功能均可用遥控器遥控。当不用遥控器控制其左(或右)转弯时,该车可自动沿地面白色轨迹线(直线或曲线)前行。在自动循迹运行中,如按动遥控器按键,则首先执行遥控指令。
工作原理
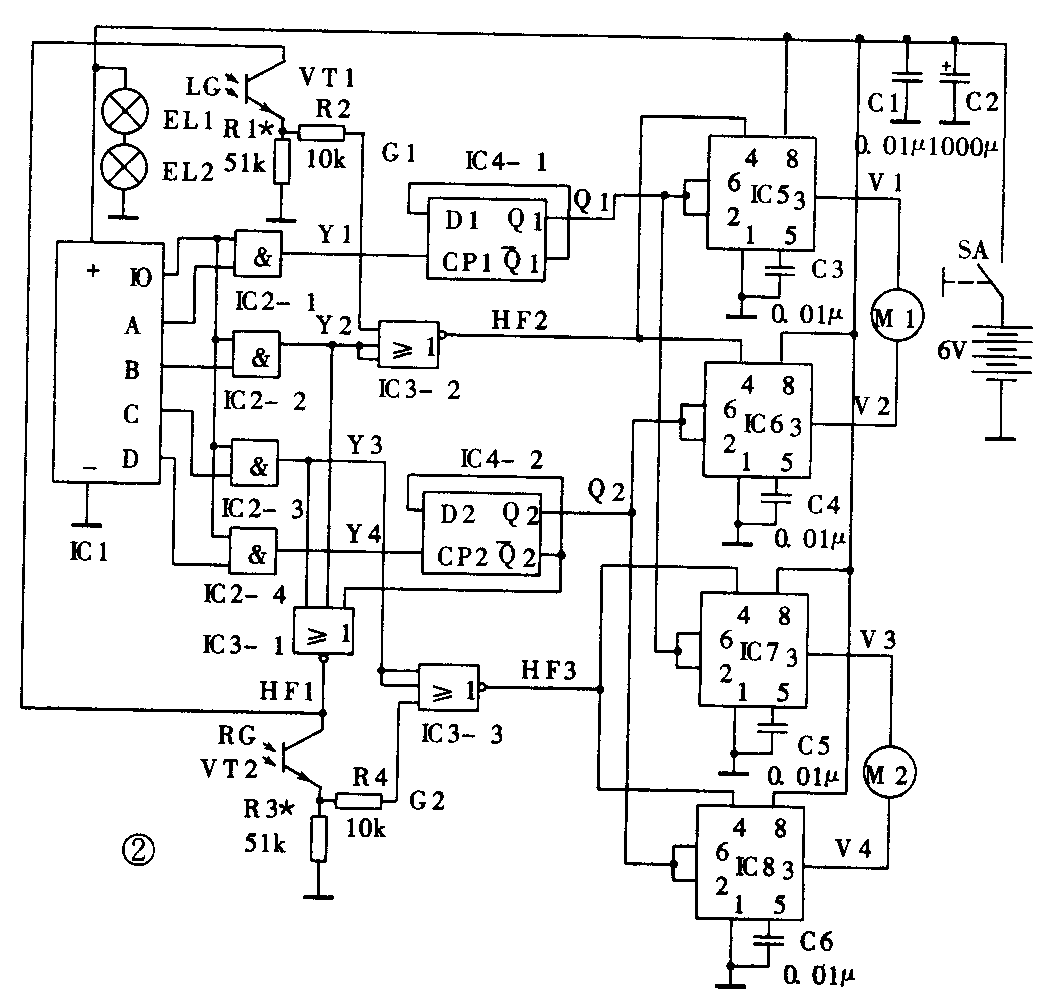
有关逻辑表达式为:V1=Q1-·HF2,V2=Q2-·HF2,V3=Q1-·HF3,V4=Q2-·HF3。
当V1·V2-=V3·V4-=1时,车辆前进;当V1-·V2=V3-·V4=1时,车辆倒退;当V1-·V2-=V3·V4-=1时,车辆左转弯;当V1·V2-=V3-·V4-=1时,车辆右转弯;当V1-·V2-=V3-·V4-=1时,车辆停止运行。
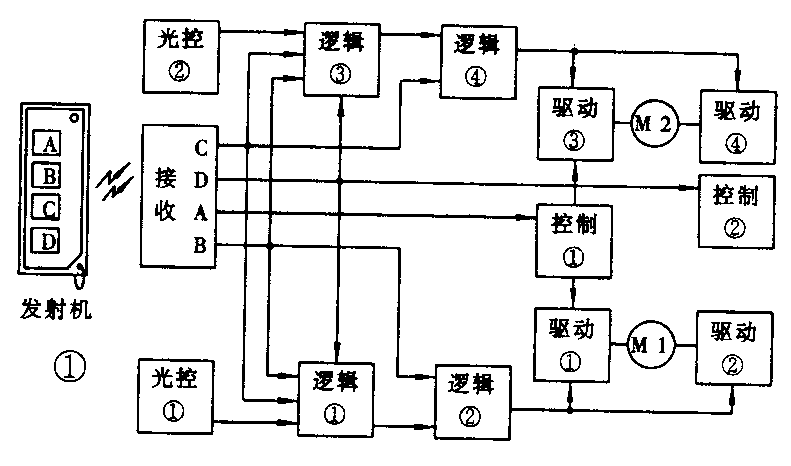
图2中,IC1为无线电接收模块,其A、B、C、D四个输出端分别与IO输出端经与门后,产生前进/停车、左转弯、右转弯、倒退/停车四个非锁存控制信号Y1、Y2、Y3、Y4。当按下遥控器某一按键时,相应端产生一正脉冲信号,控制后续电路。例如,按下A键,Y1=1,其上升沿触发双稳态触发器IC4-1翻转,Q1=0,使驱动电路IC5、IC7输出端V1=1、V3=1(此时Q2=1、HF2=1、HF3=1),M1、M2均正转,车辆前进。这时如按下B键,Y2=1,使HF1=0,V1=0,M1停转,车辆左转弯;松开B键,恢复为:Y2=0,HF2=1,V1=1,M1正转,车辆继续前进。再按一下A键,使IC4-1再次翻转,Q1=1,V1=0,V3=0,车辆停止运行。同理,读者可自行分析右转弯、倒退时的工作情况。
光电三极管VT1、VT2分置于车辆前端左、右两侧,用于检测左(右)偏离轨迹的信号。在VT1、VT2附近,分别有两只小灯泡向地面照明。当车辆行走在地面白色轨迹线上时,如车辆向右偏离,则左侧光电管必然运行到轨迹线上方,由于白色轨迹线比地面其它部分反光强(即LG=1),VT1导通,其输出G1=1,使HF2=0,V1=0,M1停转,车辆向左转弯;当VT1离开轨迹线上方后(即车辆又行走在轨迹线上),VT1截止,G1=0,HF2=1,V1=1,M1恢复正转,车辆继续前进。车辆向左偏离时,VT2工作情况亦如此。如此不断自动调控,使车辆始终沿轨迹线运行。由于控制原则设计为遥控化先,当按下左(右)转弯键B(C)时,光控系统VT1、VT2应不起作用,并且倒退时不实行自动循迹,因此,VT1、VT2的集电极不是直接接电源正极,而是由逻辑门HF1控制,使光电控制输出信号G1、G2受B、C、D键的制约,其逻辑表达式为:G1=LG·HF1=LG·Y2-·Y3-·Q2,G2=RG·HF1=RG·Y2-·Y3-·Q2。
元器件选择
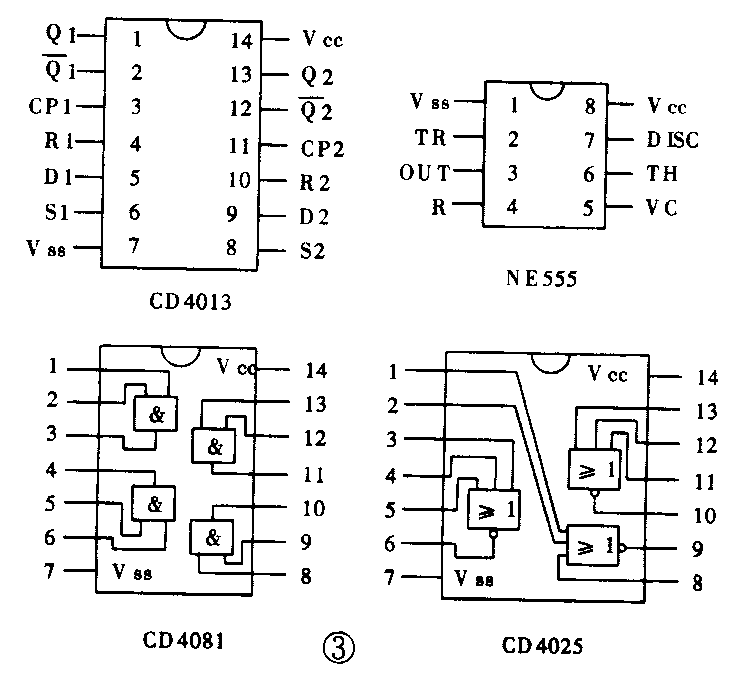
无线电遥控发射机和接收模块IC1,采用微型无线电遥控组件(参阅本刊1996年第12期《微型无线电遥控器》一文)。IC2选用CMOS四2输入与门CD4081,IC3选用三3输入或非门CD4025,IC4选用双D触发器CD4013,IC5~IC8选用时基电路NE555,它们的引脚功能图见图3。VT1、VT2选用3DU型光电三极管。M1、M2选用工作电压6V、工作电流小于200mA的微型直流电机。EL1、EL2选用电压2.5V、电流小于0.25A的手电筒小电珠。因电机、小灯泡耗电较大,图2电路最好采用1号大容量电池作电源。
安装与调试
按图4制成印制电路板。焊接时电洛铁外壳要接好地线,或拔下电烙铁电源插头利用余热焊接,以防损坏IC,也可采用IC插座。
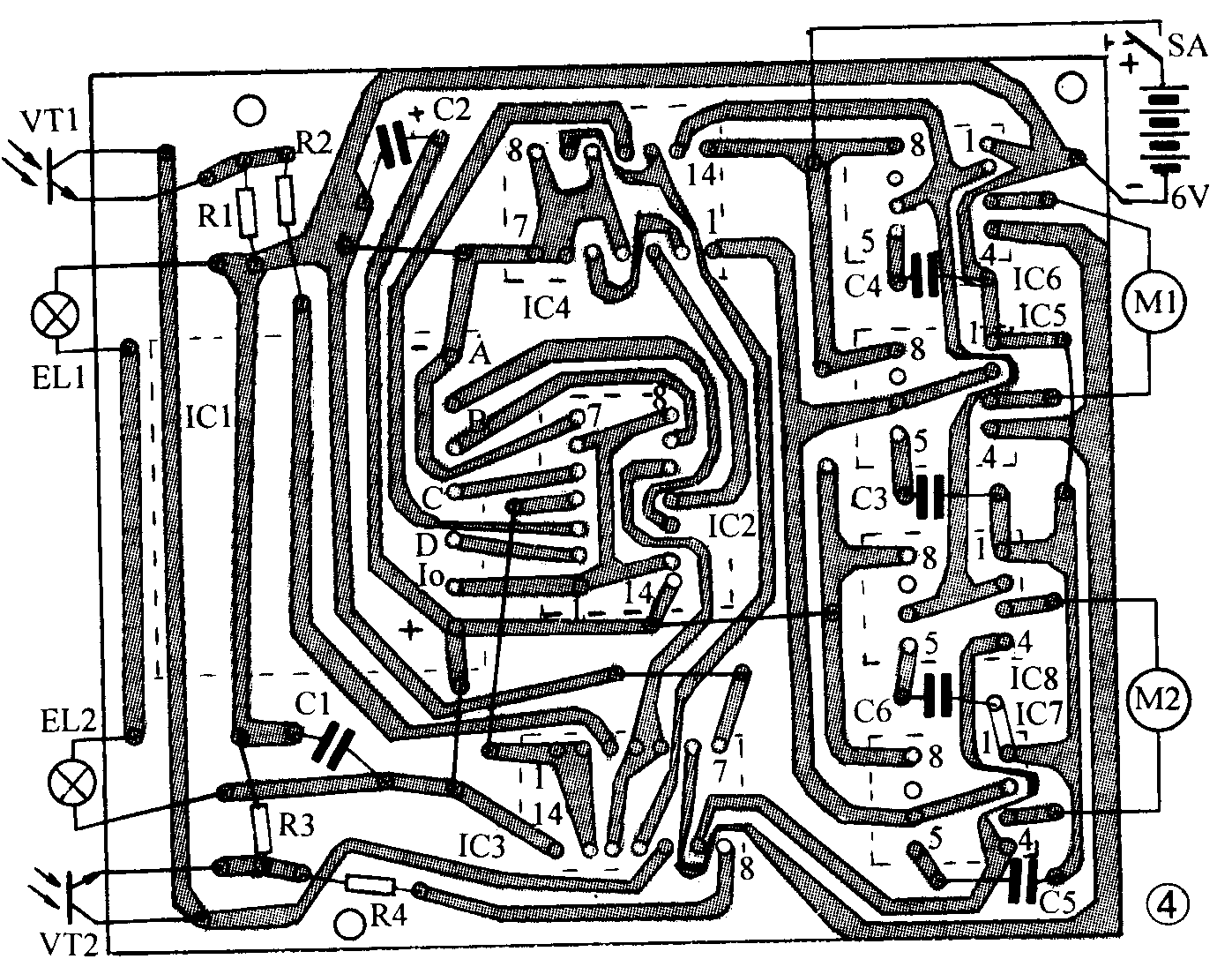
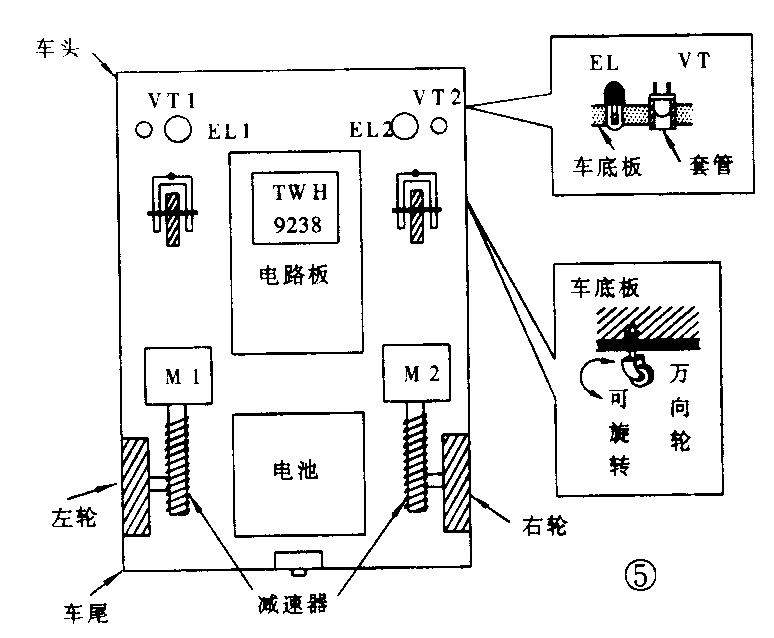
选购一辆玩具车(为防止无线电遥控信号被屏蔽,至少车身应是非金属材料的),按图5进行改造:左、右后轮为主动轮,分别由直流电机M1、M2通过蜗轮减速器进行驱动(也可采用齿轮组减速)。左、右前轮按图示改造为万向轮结构,可自由转向。车头部左、右侧分别固定有一组光电管和小灯泡,伸出车底板指向地面。为防止杂散光的干扰,光电管需套上一截不透明的套管,使其只接收正下方的光线。车体前部安放电路板,应使接收模块TWH9238尽量远离大的金属件,后部安放电池,电源开关SA置于车尾。
调试时,首先检验电机驱动系统,将电机M1(M2)引线直接接入6V电源,看其驱动车轮正、反转是否灵活,如不灵活,则应校正减速系统;正常后,将M1、M2接入电路板。其次,对照图2检查整个电路,核对无误后,即可接通电源开关SA。再次,调试光控灵敏度,当光电三极管VT1(VT2)位于白色轨迹线上方时,G1(G2)应为+5.5V~6V;当VT1(VT2)离开白色轨迹线时,G1(G2)应基本为0V,否则应调整R1(R3)使其为0V,最后,进行综合操作试验,用白粉笔等在地上画出轨迹(例如圆环状),用遥控器操纵车辆运行,当车辆行走在白色轨迹线上时,停止无线遥控,车辆应能自动沿轨迹线运行。如遥控或自动循迹失败,应检查:遥控发射机电池是否不足(通过观察其发射指示灯亮度判断);接收模块TWH9238是否靠近金属体;光控系统调试是否恰当;电路有无虚焊;有无接触不良或电池用旧;机械系统有无故障等等。综合试验完成后,罩上车壳,无线电遥控自动循迹车便可投入使用。(门宏)