这一期我们要介绍的是机器人“清道夫”,如图1所示。大家是不是觉得这个机器人“清道夫”有些眼熟?它也是在六足越野机器人的基础上完成的。下面我们就来看一下它与“踢”足球机器人和投篮机器人的不同之处。
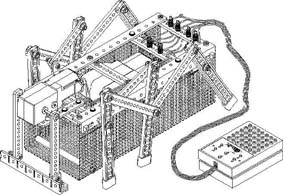
机器人“清道夫”的作用就是能够清理道路上的障碍物,因此在机器人前面装上一个能够收集障碍物的“手臂”,在六足机器人的下方有一个可以存放障碍物的箱体。当机器人“清道夫”遇到障碍物时,通过控制盒上的按钮启动手臂,把障碍物收到箱体里。
控制机器人“清道夫”手臂的电机与“踢”足球机器人和投篮机器人的控制电机一样,控制电路也相同,此处不再复述。下面介绍机器人“清道夫”的制作。
结构组装
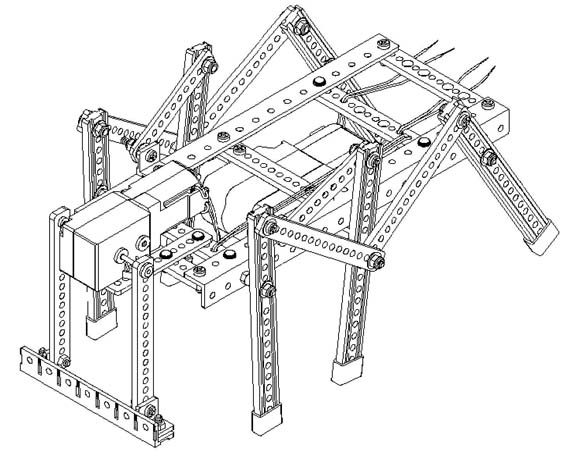
1.首先参照本刊第5期《六足拔河机器人》的介绍,完成六足机器人的结构组装,此处不再重复介绍制作过程。
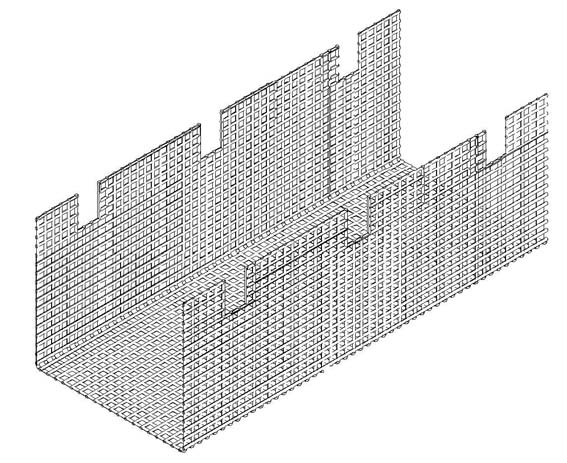
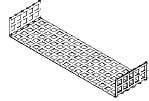
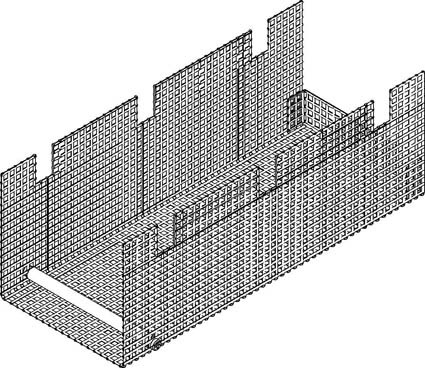
3.如图4所示制作收集障碍物的箱体,这里要注意的是为了使障碍物不从箱体中掉出来,再制作一个如图5所示的“挡板”,然后将“挡板”安装在箱体的后面。
4.为了使障碍物顺利进入箱体并不会掉出来,在箱体的前面再安装一个圆棍,如图6所示。
5.将箱体与六足机器人组装。
电路连接
1.机器人“清道夫”的电路图与“踢”足球机器人的电路图是一样的,请参照“踢”足球机器人的电路图连接。
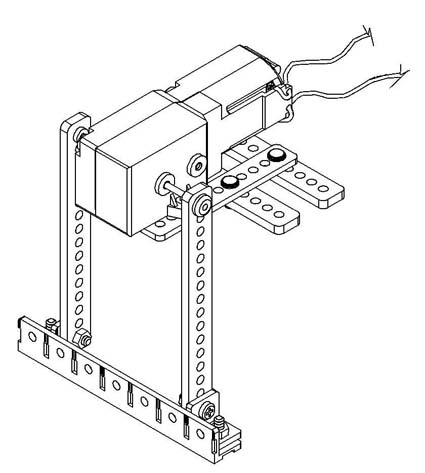
2.将控制盒上的六根连接线与控制手臂的电机和控制运动的电机连接上,如图7所示。
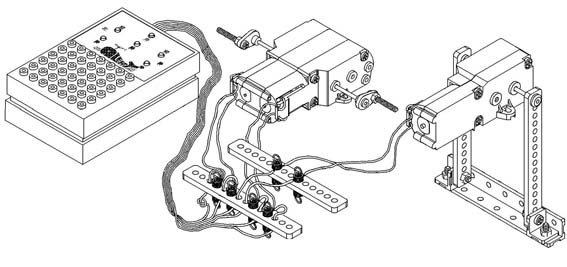
3.连接电机的六根线,如图3一样排好并固定。
调试
1.两只运动电机的调试,请参照六足越野机器人进行,此处不再介绍。
2.“清道夫”手臂的控制电机,在控制盒中间有两个按钮,当按下上面的按钮时,手臂抬起,按下下面的按钮时,手臂就收回来。
比赛
比赛场地可以是封闭的,也可以是敞开的,自己可以根据实际情况而定。障碍物建议选择乒乓球。下面介绍两种机器人“清道夫”的比赛:
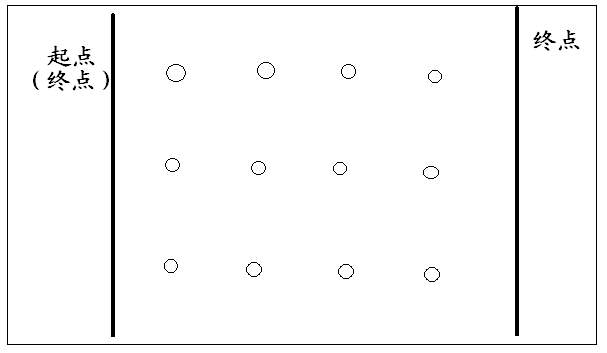
1.清除赛道障碍物:场地如图8所示。在每个赛道上等距离的摆放一些障碍物,机器人“清道夫”要将障碍物清除。看谁用最短的时间先将障碍物清除并到达终点,谁就获胜。终点可以采取折返的方式,以起点做终点,也可以一侧是起点,另一侧做终点。
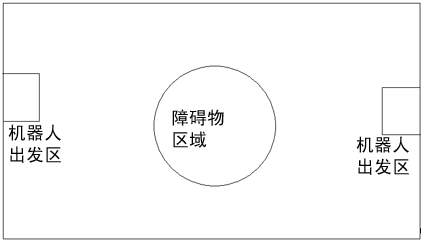
2.移动障碍物:场地如图9所示。将所有障碍物集中放在场地当中,比赛时看谁在指定时间里收集的障碍物多,谁就获胜。
到这期为止,我们介绍了六种通过驱动电机来控制机器人的各种动作。从下一期开始我们将介绍用微处理器控制机器人的方法。
文/徐蔼萍
编者注:
本刊读者服务部可为您代购机器人“清道夫”,每套邮购价75元。汇款地址:北京文崇文区夕照寺街14号A座《无线电》杂志社读者服务部,邮编:100061。汇款时请注明您的电话。