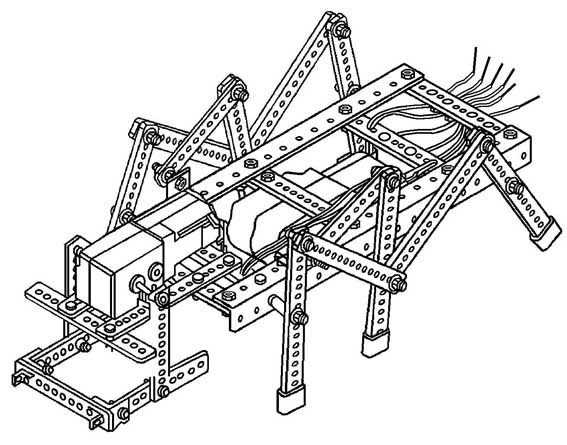
本期我们介绍一个可以“踢”足球的机器人,如图1所示。仔细观察图1我们就会发现,足球机器人是在六足越野机器人的基础上,加装了一个“踢”球装置构成的。
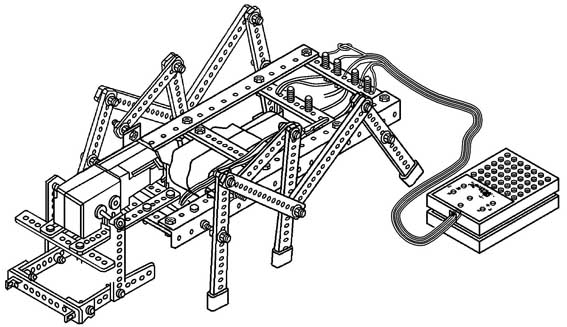
踢球装置加在六足越野机器人的前头,它的作用是在遇到球时,能够把球“踢”出去。从图1可以看出,踢球装置是由一只直流电机控制的。踢球装置电机的控制电路如图2所示,它与我们上期介绍的六足越野机器人的控制电路原理是一样的。其中M1和M2为控制机器人运动的电机,M3为控制踢球装置的电机。
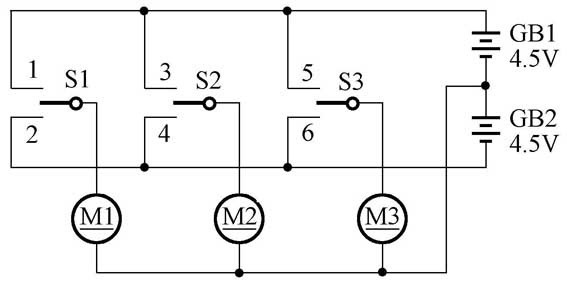
当开关S3接通触点5时,电源GB1的正极接在直流电机M3的上端,GB1的负极接在电机M3的下端,这时电机M3正向转动,连杆带动踢球装置往前往上运动,就可将球踢出去。
当开关S3接通触点6时,电源GB2的正极接在电机M3的下端,GB2的负极接在直流电机M3的上端,这时电机M3反向转动,连杆带动踢球装置往下往后运动,使踢球装置回到原位。
下面介绍“踢”足球机器人的制作。
结构组装
1.六足机器人的结构组装,请参照第5期介绍的六足拔河机器人,此处不再重复。
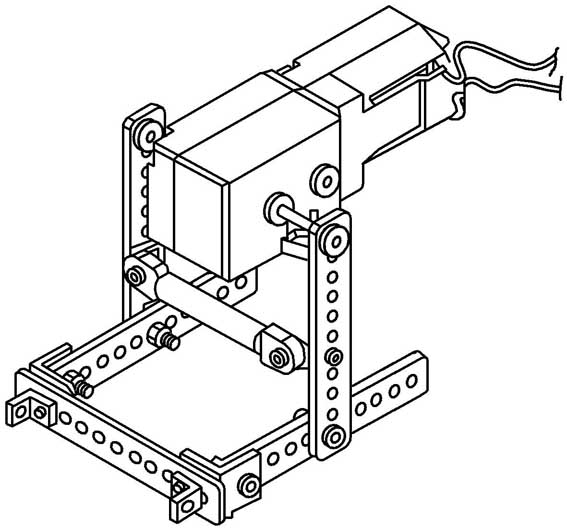
2.先组装踢球装置,如图3所示。
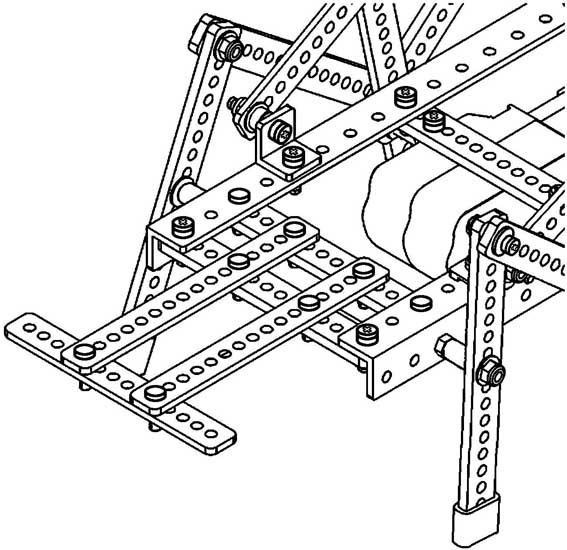
3.再将踢球装置的固定支架装在六足机器人的前面,如图4所示。
4.最后将踢球装置安装在固定支架上,如图5所示。
电路连接
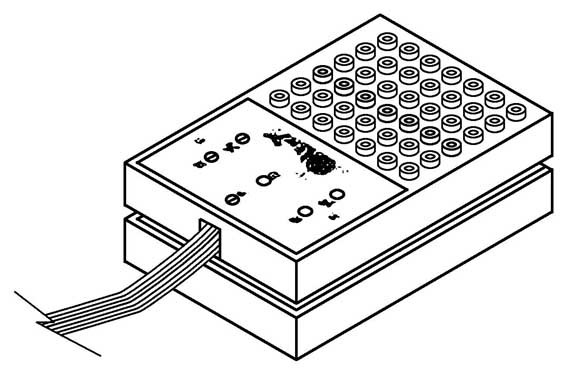
1.踢足球机器人的控制盒有6根线,如图6所示;4根一组的是控制机器人运动的两只电机M1、M2;2根一组的是控制机器人踢球装置的电机M3。
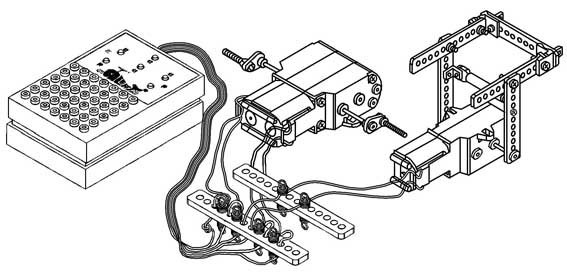
2.按照图2所示的电路进行连线,如图7所示。
调试
1.两只运动电机的调试,请参照第6期六足越野机器人进行。
2.踢球装置的调试,在控制盒中间有两个按纽,当按下前时,踢球装置就往前“踢”,按下后时,踢球装置就收回来。
比赛
比赛的方式多种多样,这里介绍两种供参考。比赛用“足球”可以是乒乓球、网球或其他代用品。
1.踢球比赛1:
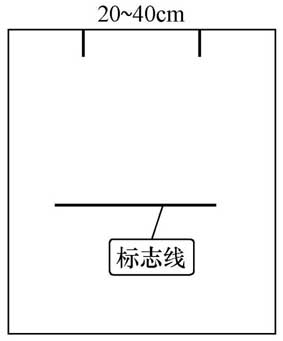
在比赛场地中设置一个球门,球门的大小为20~40cm,在距离球门的一定位置画一条标志线,如图8所示:(1)机器人从标志线的位置将球踢出去;(2)机器人从标志线的位置开始带球前进;(3)无论采用哪一种,最后都是看在一定时间里,谁进的球多谁获胜。
2.踢球比赛2:
比赛场地不变,比赛时是两个机器人,一方攻球,另一方守球。每场不超过3分钟,然后互换位置,最终进球多者获胜。
文/徐蔼萍
编者注:
本刊读者服务部可为您代购“踢”足球机器人,每套邮购价60元。汇款地址:北京崇文区夕照寺街14号A座《无线电》杂志社读者服务部,邮编:100061。汇款时请注明您的电话。