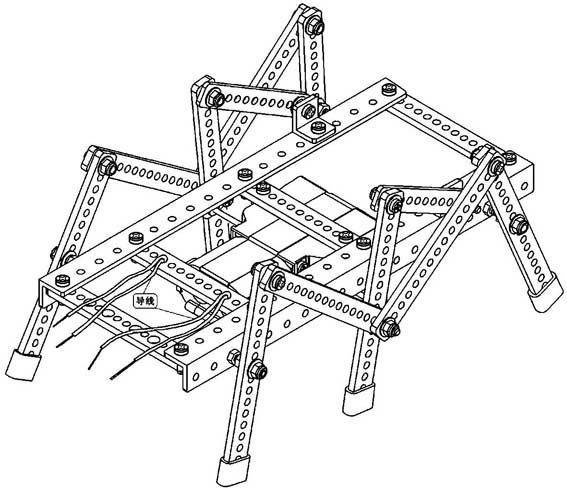
这一期我们介绍六足越野机器人,如图1所示。六足越野机器人与六足拔河机器人的外观结构一样,只是比六足拔河机器人多了一个控制盒,控制机器人运动的电机也由单电机改为双电机。
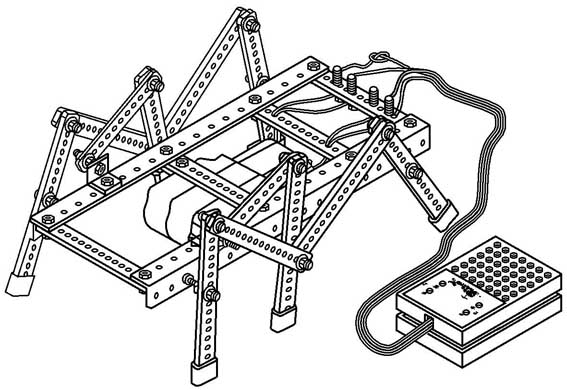
在四足竞速机器人和六足拔河机器人中,由于机器人都是单方向、直线运动的,所以可由一只电机来完成。六足越野机器人,在运动过程中不仅要进行直线运动,有时还要进行绕转运动,所以必须要用两只电机,才能控制机器人的运动。
我们知道,直流电机在接通电源时,会朝着一个方向转动,如果把电源正负极调个头,电机就会朝相反的方向转动。六足越野机器人,在运动过程中,既能前进还能后退,既能右转还能左转。这些都是由线控盒来控制的。
电路原理
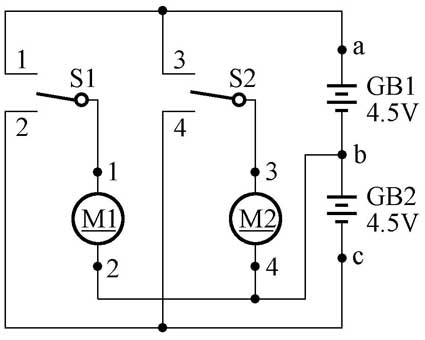
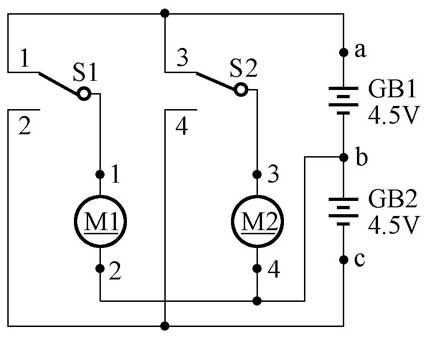
实现直流电机正反向转动的电路如图2所示。在图2中,有两只直流电机M1、M2,两组4.5V的电源GB1、GB2,还有两组双向开关S1、S2。
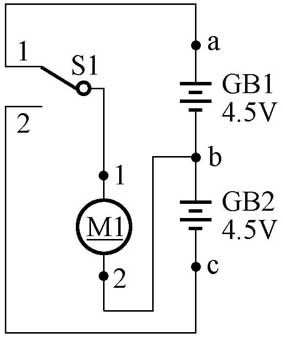
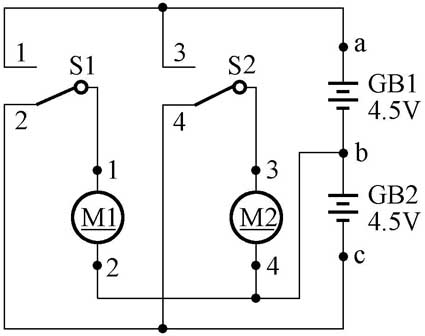
当双向开关S1推至1时,电源GB1的正极a端经过S1接在直流电机M1的1端,GB1的负极b端接在电机M1的2端,这时电机M1正向转动, 如图3所示。
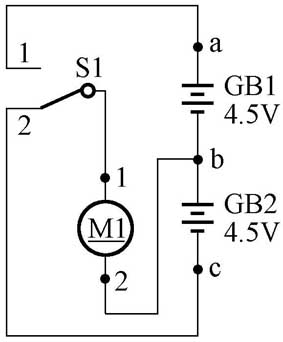
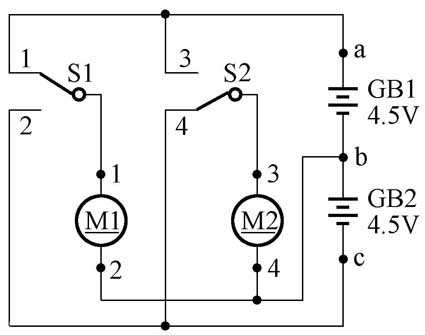
当开关S1推至2时,电源GB2的正极b端接在电机M1的2端,GB2的负极经过S1接在直流电机M1的1端,这时电机M1反向转动, 如图4所示。
因为S1和S2分别控制两只电机,如果当S1、S2同时向前推至1和3时,电机M1和M2同时向前转动,机器人往前走, 如图5所示。
当S1、S2同时向后推至2和4时,电机M1和M2同时向后转动,机器人往后走, 如图6所示。
如果S1和S2一个往前、一个往后,机器人就会向左或向右原地转圈,如图7所示。
结构组装
关于六足越野机器人的基本结构组装,请参照上一期完成。在这里只介绍与六足拔河机器人不同的结构。
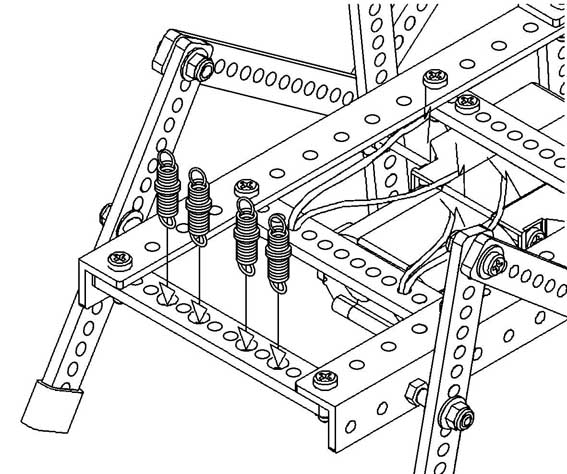
1. 将双电机安装在图8所示的位置上。
2. 将电机的导线从中间条的孔中穿出,如图8所示。
3. 在原来六足机器人安装开关的位置,装上4个双耳弹簧,如图9所示。
电路连线
每只电机有两根线: 一根为红色;一根为黑色。
1. 将右侧电机的红线接在弹簧①上,如图10所示。
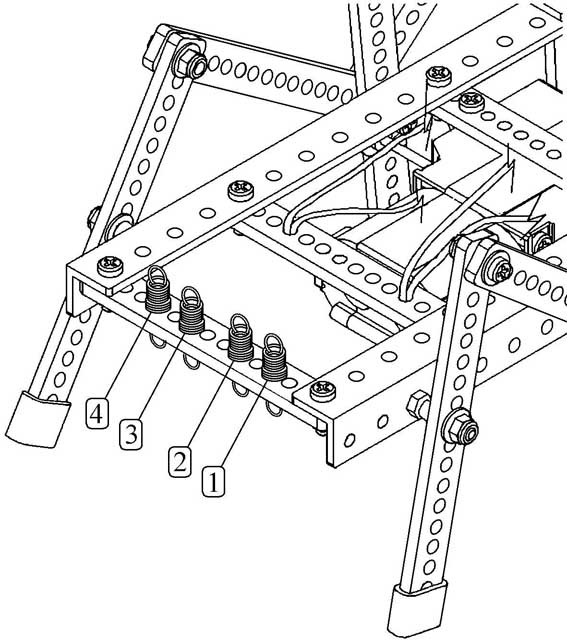
2. 将右侧电机的黑线接在弹簧②上。
3. 将左侧电机的红线接在弹簧③上。
4. 将左侧电机的黑线接在弹簧④上。
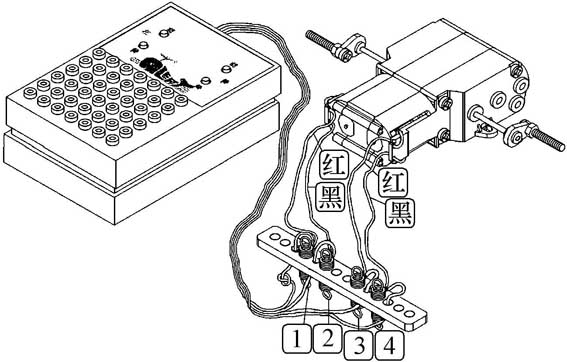
5. 将控制盒的四根连线,以打节的一根开始,顺序接在弹簧①、②、③、④上,如图11所示。
调 试
1. 将电池装在控制盒内。
2. 拿起控制盒,按下控制盒上的左侧“前”,机器人的左脚往前运动,这时机器人往右转。
3. 松开左侧“前”,再按下控制盒上的右侧“前”,机器人的右脚往前运动,这时机器人往左转。
4. 当你同时按下左右侧的“前”,机器人就往前运动了。
5. 用同样的方法可以检测往后运动。
如果你按下左侧“前”,是右侧电机转动,你就要把两只电机的连接线对换;如果你按下“前”,机器人往后走,你就把电机的两根线对换就可以了。
比 赛
比赛可以有多种方式,这里仅介绍一种绕标比赛。
1. 绕标比赛1,场地如图12所示。要求机器人从场地一端出发,绕过场地中摆设的障碍物,到达终点。
2. 比赛模式: 可以一个一个比赛,记录到达时间,谁快谁获胜;还可以采取对抗的方式,两个机器人从两侧同时出发,谁先到达,谁获胜。
3. 绕标比赛2,场地见图13。要求机器人从A点出发,顺序绕过第1、2、3、4、5个障碍物之后,到达终点B。
文/徐蔼萍
编者注:
本刊读者服务部可为您代购六足越野机器人,每套邮购价55元。汇款地址:北京崇文区夕照寺街14号A座《无线电》杂志社读者服务部,邮编:100061。汇款时请注明您的电话。