[编者按]
机器人“全运会”是一个以机电一体化为主的全面性的机器人普及活动,它将面向全体爱好者包括中小学生和成人(非专业人员),更希望有条件的残障儿童和学生能够参加。我们将通过机器人“全运会”这个栏目,向广大读者介绍机器人的基本动力、能源、机械结构、控制等机电一体化及智能控制的基础知识和原理,并从简单的机器人制作入手,由浅入深直到完成复杂的智能机器人的制作。我们计划用一年左右的时间陆续介绍四足竞速机器人、六足拔河机器人、越野机器人、线控投篮机器人、足球机器人、清道夫机器人以及避障机器人和轨迹跟踪机器人等等,并在适当的时候组织机器人“全运会”比赛。
机器人“全运会”作为科普项目,融知识性、趣味性、实践性、娱乐性于一体,通过制作和比赛培养参与者的动手能力、创造能力和想象力,有助于培养创新型人才;爱好者在学习、制作、娱乐过程中增长知识,增长能力,增长才干,提高全民科普教育水平。我们希望这个专栏能在培养有创新精神、创新意识、创新能力的新型人才中发挥作用。*
21世纪随着纳米技术的突破,机器人将会像个人电脑一样,走进家庭,走进人们的生活,成为人类社会必不可少的生活用品或工具,这是世界机器人发展的趋势。
你是不是很想有一个属于自己的机器人呢?在我们介绍具体项目制作之前,首先了解一下机器人的构成,如图1所示。
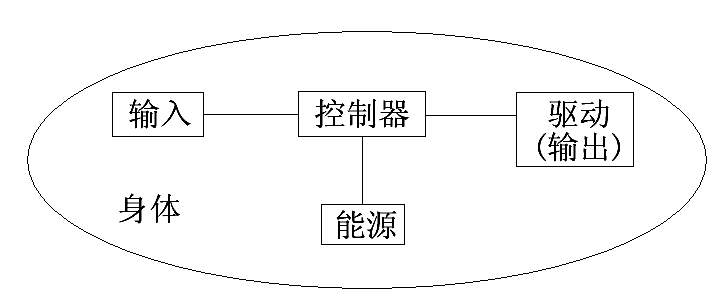
图1中机器人的“大脑”,我们把它称为智能控制器(微处理器)。它可以控制机器人对各种环境信息的采集、加工和处理,又可以控制机器人做出各种动作。智能控制器是由人通过语言编程来实现控制的。
图1中的输入部分,相当于人体的感觉器官。它可以通过红外传感器、温度传感器、声音传感器和亮度传感器等等采集周围的环境信息。
图1中机器人的身体,相当于人体的骨骼、手、脚等部分。它可以是任何形状,有固定的,也有可移动的;有用轮子行走的,也有用履带行走的,还有用脚行走的;有手臂摆动的,有头部转动的等等。
图1中的输出部分与机器人的身体密切相关,通过驱动可以控制机器人的各种动作。
四足竞速机器人的结构非常简单,它包括三个部分,如图2所示。第一部分是机器人的肢体,它是由一些专用的塑料扁条、角条、接头等组装起来的。第二部分是机器人的动力,我们又把它称为齿轮箱,是由一只直流电机和若干齿轮组成。第三部分是机器人的能源,由两节5号电池组成。
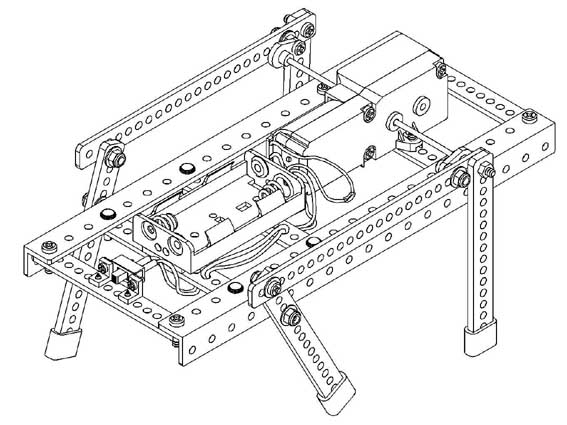
下面我们就来看一下四足竞速机器人是怎样工作的。当我们打开电源开关,电机中就会有电流流过,电机轴就会旋转,经过齿轮箱的减速之后,在齿轮箱的输出端轴A就会得到一个比较慢的转速。在轴A的两端各有一个小曲柄,方向刚好相反,曲柄的另一端分别连接着机器人的左脚和右脚。当轴A转动时,两个小曲柄随之转动,分别带动机器人的左脚、右脚,进行上、下、前、后的运动,于是机器人就开始向前行走了。
下面我们就介绍四足竞速机器人的制作。
一、组装齿轮箱
1.将小齿轮装在直流电机的轴上,如图3所示。
2.按照套件图纸组装齿轮,如果齿轮箱已装好此步可省略,如图4所示。
3.曲柄的组装。如图5所示,先将螺钉与曲柄固定。

4.将曲柄固定在齿轮箱输出轴的两端,如图6所示。注意两个曲柄固定时的方向要相反。
5.齿轮箱与扁条固定,如图6所示。
二、组装开关
如图7所示将开关与扁条固定。
三、组装支架
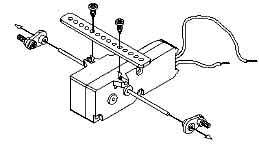
1.如图8所示,将开关、齿轮箱、电池盒等固定,扁条与角条支架固定,然后再将电池盒粘在支架上。
2.制作左右脚。左脚如图9所示,右脚如图10所示。
3.组装左右脚。如图11所示。
至此,四足机器人的基本结构已经完成了。
四、电路连接
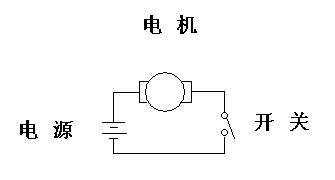
将电机、电池盒、开关如图12所示的电路和实体图进行连接。
五、调试
1.在电池盒中装上两节5号电池,把开关打开,机器人就开始运动。
2.左右两脚,各有一只是直角,另外一只左脚往外撇,右脚往里拐。
机器人制作完了,现在你就可以带着你的机器人去参加竞速比赛了,看看谁能得第一。
文/徐蔼萍
编者注:
本文的视频讲解见下期配刊光盘。本刊读者服务部可为您代购四足竞速机器人,每套含邮资30元。汇款地址:北京崇文区夕照寺街14号A座《无线电》杂志社读者服务部,邮编:100061。汇款时请注明您的电话!