多功能汽车防盗器是一种具有超远距离和近距离双重控制汽车功能的装置。
目前的汽车防盗器是以手动无线遥控方式为主,控制距离一般在15m左右。由于受到不同时期技术水平的限制,绝大部分的手动遥控汽车防盗装置在设计上性质雷同,功能都比较简单,而且在安装时需要将原汽车的相关电路部分剪断后才能起作用,这也是众多汽车防盗装置不易推广使用的主要原因。
本文介绍的多功能汽车防盗器(专利号LZ 98208298.3)在设计上弥补了传统汽车防盗器的不足,它可通过无线寻呼台实现对汽车的远距离控制。该项目应用了现代通讯技术与数字化识别系统,实现了控制智能化,具有良好的稳定性和可靠性。
多功能防盗器的作用是当汽车被盗窃或被抢劫(可及时弃车逃身)后驾驶员可以使用电话或手机拨打当地(有服务协议)的寻呼台(自动台号)的号码,待电话拨通后,再用电话输入控制指令,此时寻呼台便可将指令以数字信号的方式发射出去。当安装在汽车上的防盗主机接收到寻呼指令后,就会立即关闭汽车的发动机,致使汽车无法继续行使。与此同时防盗器还会自动发出紧急求救报警信号,以便引起行人或巡警的注意。该装置的控制范围是与寻呼台的控制范围一致。
多功能汽车防盗器共有三条寻呼控制指令:
第一条指令是在紧急情况下使用,功能为:强行关闭发动机的点火系统、自动锁闭中控门锁、发出紧急求救报警信号。
第二条指令是在正常情况下驾驶员远离自己汽车时使用,功能为:关闭发动机的点火系统、锁闭中控门锁(但不输出报警求救信号);
第三条指令的功能为:解除第一条和第二条指令的设置。
为了避免防盗器主机出现错误的执行控制指令,因此在三条寻呼控制指令中除每条指令各有一组指令的特征代码外,还加有一组相同的密码,即:每条寻呼指令是由各自的指令代码和一组共用密码组成。每个防盗器的主机密码均由使用者确定或修改。
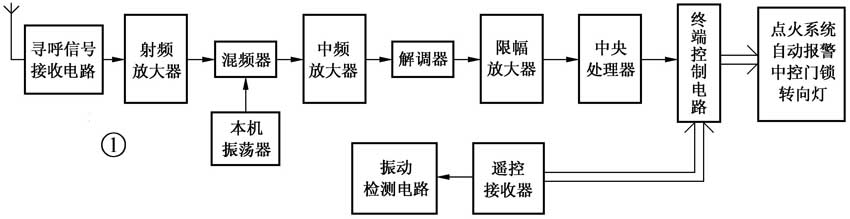
多功能汽车防盗器的电路设计主要由:寻呼信号接收电路、中频处理电路、数字识别及译码电路、手动遥控接收器、振动检测电路、终端控制电路以及电源稳压部分等组成,电路框图如图1所示,原理图如图2所示。
寻呼指令的控制原理
当驾驶员通过寻呼台发出某一指令时,发出的高频寻呼信号就会被防盗主机内部的天线接收到,经天线(T1)与C1、L1耦合至VT13的基极,并将接收信号放大。再由VT14与VT15等元件组成的电路将放大后的高频信号经混频后进一步放大,然后经X1、C11将混频后的信号送入中频处理电路(IC2)。中频处理电路把输入的信号差频为4 5 5 kHz信号并予以限幅放大、检波整形,然后恢复出POCAG码。解码信息经IC2的(11脚)输出至IC1做进一步的处理。IC1将输入的数字信号自动解码识别处理后,就会在P1口输出相应的电平控制信号,从而直接控制中端执行部分的驱动电路。当终端控制电路执行指令后,对应的继电器开始动作,于是就完成了控制目的。
终端控制电路是由电阻R25~R34、三级管VT1~VT8、二极管VD1~VD7、继电器K1-K5构成,终端控制电路中的各继电器所起的作用为:
K1:汽车点火系统输出控制;
K2:报警器信号输出控制;
K3:锁闭中控门锁;
K4:解除锁闭的中控门锁;
K5:左右转向灯的输出控制;
下面举例叙述驾驶员在使用第一条寻呼指令时的全过程:
驾驶员先用电话或手机拨通寻呼台(直接拨自动台)的号码,电话拨通后就将指令作为信息内容用电话输入第一条指令的内容(3位指令代码 + 8位密码),即:
111 + XXXXXXXX 。输入指令后即可关机,此时寻呼台很快就能将指令发射出去,正常情况下防盗主机在2分钟左右就可以收到寻呼指令。收到指令后,防盗主机对指令的处理过程如上所述(这里不再叙述)。当CPU(IC1)确认收到第一条指令后,首先将P1.7由高电平变为低电平,VT1会立即导通,K1得电后吸合,触点转换将+12V电压送到KZ口。外接功率控制继电器开始工作,汽车的点火系统被强行关闭。接着CPU又将P1.6、P1.5、P1.3变为低电平(P1.3的电平是以1秒钟为周期在高、低之间不断变化),于是VT3、VT4、VT8导通,K2、K3、K5吸合。当K2吸合后,为报警器提供了+12V的工作电压,于是开始报警。当K3吸合后,中控门锁的电机得到了正向工作电压,门锁被拉动上锁,上锁(1秒钟)后,CPU又将P1.5恢复为高电平,电机停止工作。当K5吸合后,左右转向灯就会得到周期为1秒钟的脉冲电压,开始闪烁(而K1、K2的工作状态不变)。此时防盗主机只有再次收到第三条指令后,才会解除点火系统的锁闭和停止报警,汽车才能恢复正常状态。另外两条指令的使用方法与此相同。以上就是从发出指令到执行完指令时的全过程。
手动遥控部分是由遥控发射器与接收器、振动检测电路等组成,手动遥控部分主要是为驾驶人员在近距离情况下方便操作而设计的,手动遥控的具体控制功能为:
按(A)键:将中控门锁上锁;按(B)键:关闭发动机的点火系统,同时开始设定振动检测报警;按(C)键:开启中控门锁;按(D)键:解除发动机点火系统的锁闭与振动检测报警的设防,恢复汽车的正常状态。
手动遥控的控制原理
当驾驶员按下遥控发射器的(A)键时,接收器的(A)端由低电平变为高电平,于是VT5、VT9因正向偏置而导通,K3得电吸合。K3的触点从负极电压端转换至+12V电压端,于是中控门锁的电机得到了正向工作电压,车门锁被拉动上锁。(A)键释放后,电机就会停止工作。
当按下发射器的(B)键时,接收器的输出口(B)端由低电平变为高电平,于是VT2、VT11因正向偏置而导通,K1得电吸合。触点转换到+12V电压送到KZ口,外接功率控制继电器开始工作,汽车的点火系统被关闭。此后汽车就无法正常启动VTQ11导通后,由振动传感器(RV)、时基集成电路IC3(555)以及VT12、VT10、R38-R45等组成的振动检测电路得电开始工作。此时如有人撞击汽车的任何部件时均会产生振动,RV不间断的在检测受到的振动强度,如外界振动超过一定强度时,RV就会把振动信号转换为电脉冲信号,经C33耦合至VT12的基极将信号放大后,触发IC3的②脚。于是IC3的(③脚)便输出一个正电平(30秒钟)的延时信号,此时VT10因正向偏置而导通,K2得电吸合,报警器供电30秒钟,开始发出报警声。待IC3的输出延时结束后,报警声才会停止。报警结束后,RV重新开始检测振动的强度,重复上一过程。
当按下发射器的(C)键时,接收器的(C)端由低电平变为高电平,于是VT7、VT9因正向偏置而导通,K4得电吸合。K4的触点从负极电压端转换至+12V电压端,于是中控门锁的电机得到反向电压,车门锁被拉动开启(C键释放后,电机就会停止工作)。
当按下发射器的(D)键时,接收器的A、B、C端均会变为低电平,因此设防就被自动解除,振动检测电路也停止工作,汽车恢复正常状态。
当有任何一个按键被按下时,发射器的(IO)端口均会输出一个正脉冲信号作为按键的有效确认。因此,无论按下任意一个键,VT10都会因正向偏置导通,使得K2瞬间得电吸合,于是发出一声鸣叫,以提示驾驶员在操作发射器时为有效。
电源稳压电路由稳压集成块IC4、VD9、VD10、C36~C41、L9、L10构成,该电路将汽车蓄电池的12V直流电压变换为稳定的+6V直流电压,供给整个寻呼信号接收电路、CPU电路以及手动遥控接收电路等使用,以提高各部分电路的工作稳定性。
(荣贵)