民间经常采用的廉价报警设备,功能单一,可靠性较差。为此笔者设计出0一款硬件极其简单的智能报警器,配套以优化的判断程序,去伪存真,使报警可靠性大大提高。
1.传感器的改造
中小型报警系统的盗警采集传感器常采用微波感应、人体红外线探测和振动移动三种。振动移动传感器可采用水银开关和专用集成加速度传感器。前者灵敏度低,方向适应性极差,不可靠。后者价格高,且电路复杂,尚未获得广泛应用。实际上,最廉价的振动移动传感器当属压电陶瓷片,批发价每片不足2角。
普通的压电陶瓷片,能较灵敏地感应振动信号和声波信号,而对振动、移动信号的感应,灵敏度很低。我们将普通的压电陶片在结构上加以改造,使之能灵敏地感应振动和移动信号,从而使之感应声波的灵敏相对降低。这样,再利用程序进行细节识别,就能使报警系统有效地剔除声波干扰,灵敏而准确地对振动、移动警情做出正确的判断。
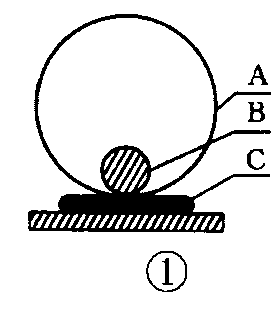
新型振动移动传感器的结构示意图见图1。C是直径为1.5cm的小压电陶瓷片。选择最小的压电陶瓷片,主要是为了降低其感应声波的灵敏度;A是与C粘在一起的一个球形腔体,B是一个能在A中自由滚动的滚珠。这样,当传感器受到振动或移动的扰动时,B就在A中振动或滚动,使传感器感应振动、移动的灵敏度大大提高,且能适应任一方向。经实测,此传感器感应90dB声波输出的电信号的幅度在10mV以下,而感应振动移动触发输出的电信号幅度在200mV以上。因此,在使用中通过对幅度的判断,很容易区别这两种信号,从而提高可靠性。
2.电路限幅
警情判断与信息发送电原理如图2所示。
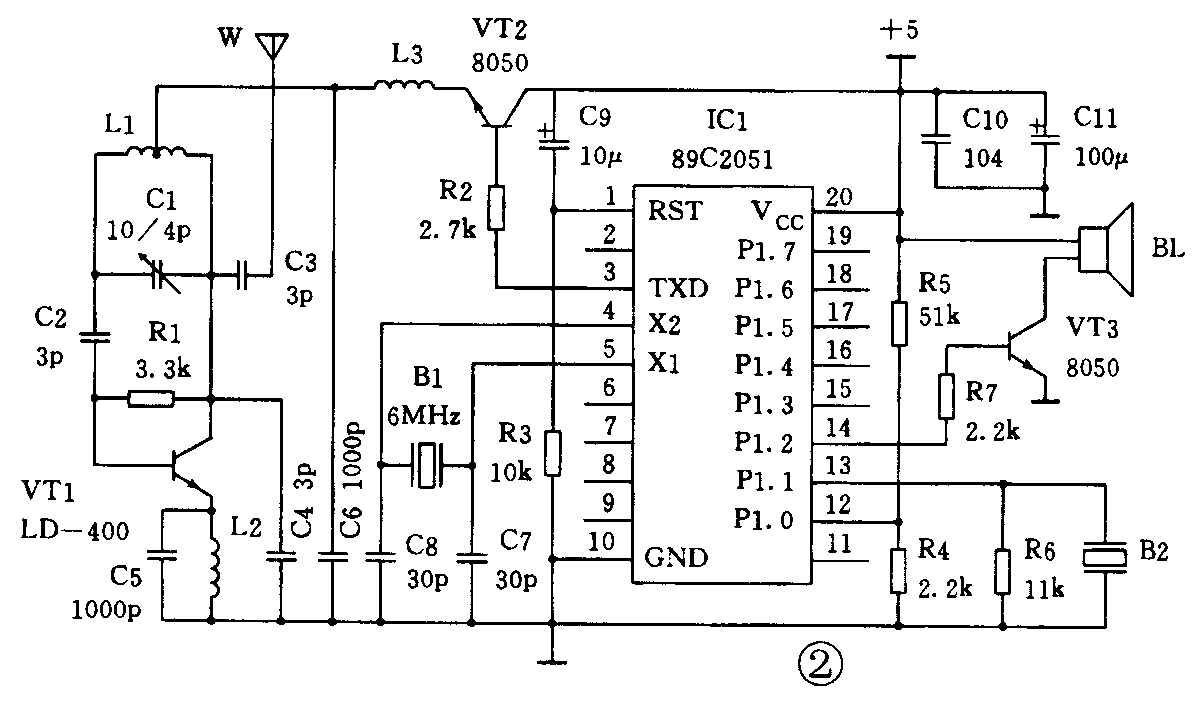
IC1、C9、R3和TX等组成了单片最小系统。系统上电完成初始化后,P3.l(TXD)呈低电位,使VT2截止,发射电路不工作。由图2可知,经R4、R5分压后,P1.0得到一个大约200mV的电位,此电位作为振动信号幅度的参考基准。当无振动或移动的扰动时,传感器中压电陶瓷片B2无电信号输出,P1.l的电位为零;当有声波信号激发传感器,除能量极强的,如5m以内的鞭炮声,B2输出的电信号幅度在于10mV以下,所以,无振动移动和超强声波作用于传感器,P1.0的电位会高于P1.l的电位,致使AT89C205lP片内比较器输出端P3.6呈高电位;当传感器感应到振动或移动时,压电陶瓷片输出的电信号的幅度将超过200mV,此时,P1.l的电位高于P1.0的电位,使P3.6的电位发生跳变,由原来的高电位跳变为低电位。这样,就有效地检测到了振动移动信号,剔除了中强度声波信号的干扰。
3.程序控制
由上述可知,靠电路硬件的输入基准就能可靠限制较强的声波干扰,但遇到极强的声波信号(如5m以内的鞭炮声),压电陶瓷片B2输出电信号的高频分量的幅度也会超过200mV,使P3.6电位发生跳变而形成干扰,这时,可利用程序进行判断来加以区分。传感器感应鞭炮声输出的幅度超过200mV的电信号的持续时间是短促的。经测量,一般在30μs以内,而振动移动使传感器输出的幅度超过200mV的电信号杂波串的持续时间是较长的,一般在100μs以上。因此,利用程序来判断P3.6呈低电位的时间的长短,就能将超强声波干扰和振动移动信号区别开。为提高可靠性,我们把临界时间定为150μs,小于此值的跳变为超强声波干扰,大于此值的跳变确认为振动移动的警情信号。其过程是:当检测到P3.6呈低电位时,系统即装判断时间常数,使CPU在150μs内对P3.6持续检测。如果在此时间内P3.6跳回高电位。则确定此次触发为非法,程序返回初始状态;若在此时间内P3.6一直保持低电位,则判断为有效触发。这样,就将类似鞭炮爆炸的强声波信号与振动移动区分开了。实际上,一旦发现移动振动信号就报警也是不可靠的,因为这很可能是现场人员的无意触动或偶发振动或移动。区别这种情况,我们可以利用检测振动移动的频次来实现。当确认振动移动发生后,即设定一个2s的时间常数,在此时间内触发少于3次为偶发,等于、多于3次即确认为警情发生。警情确认无误后,启动报警子程序,先将警声信号从P1.2输出,推动VT3带动BL发出警声。然后,将系统特征码、本机地址码和警情信息打成数据包送至TXD位,通过P3.l输出,调制发射电路将信息发送出去。 此系统的功能是可以扩展的。如果将人体红外线探测、微波探测、红外线或激光栅切割等信号通过P1的其它口线输入,通过软件控制,对各信号的存在时间、先后顺序以及逻辑关系进行分析后再确定报警与否,功能就更强,可靠度就更高。(滕世进)