本文介绍的“迷你博士”,能自动搜寻、跟踪目标,是一种集遥控与编程为一体的电子机械玩具。娱乐者手持“目标”(红外小型发射器),在5~8m的范围内,对准可爱的“迷你博士”(以下简称“博士”)“博士”将自动奔向目标。若将“目标”转移,“博士”又会自动搜寻“目标”,并进行跟踪、接近,别有一番情趣。
工作原理
“博士”的电原理图见图1。
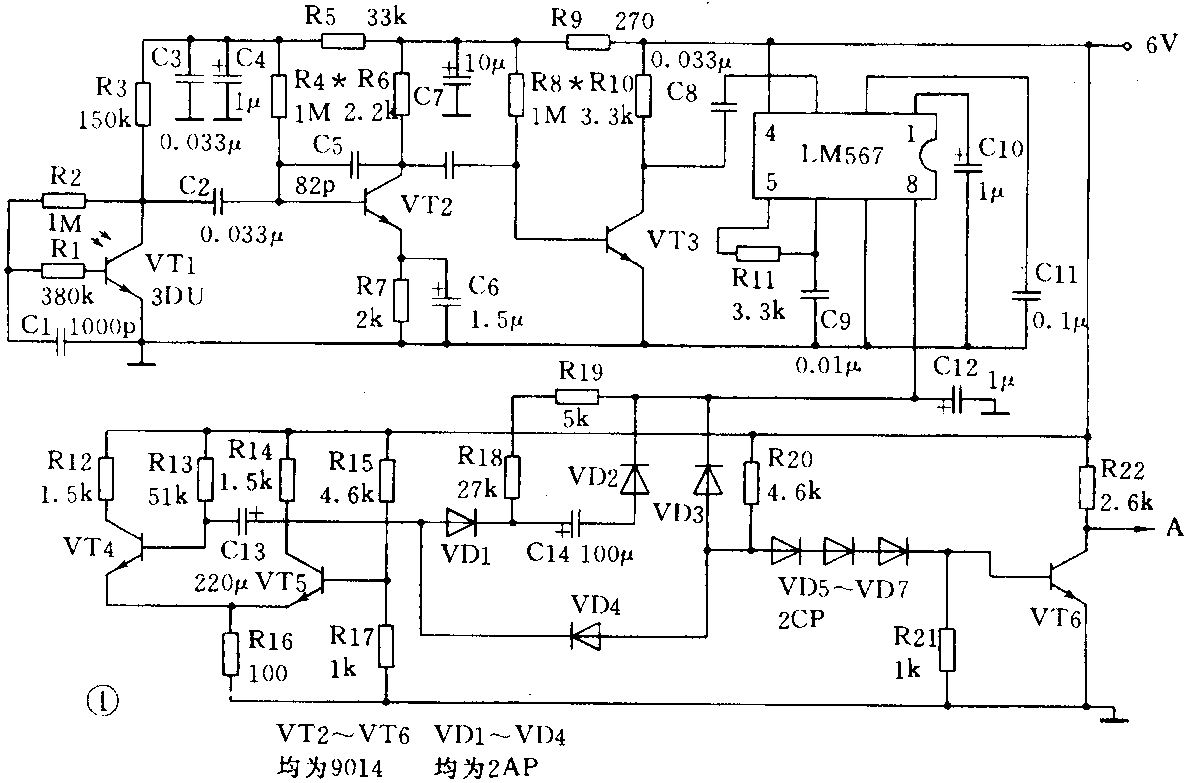
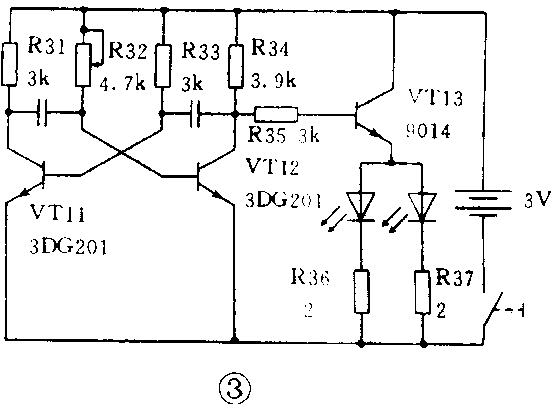
玩具主体“博士”开机后,由图2中的VT7、VT8组成的无稳态多谐振荡器控制VT10,使电动机M以T≈9s作间歇式倒转,驱动“博士”以约40cm的转弯半径倒行作圆周运动,自行搜寻“目标”。这里所说的“目标”是如图3所示的由VT11~VT13组成的自激式红外线发射器,其频率为38kHz。当图1中的光电三极管VT1,收到“目标”发出的红外光信号时,经VT2、VT3两级阻容耦合放大电路放大后,经C8送入音调译码集成电路LM567,使其输出端(8脚)为低电平,经二极管VD1触发由VT4、VT5组成的单稳态触发器,使VT5导通,并使VT6截止,A点为高电平。于是,VT9导通(图2),继电器K1吸合,电动机M正转,“博士”向“目标”方向前进。由于单稳态触发器暂稳态持续时间为7s,所以,经7s后,又恢复到搜寻状态。
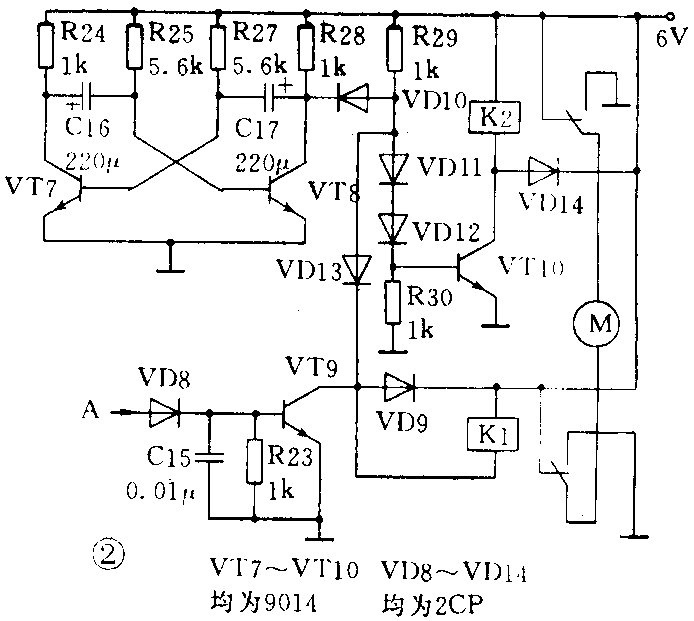
当“博士”搜寻到“目标”或把“目标”对准“博士”时,LM567将维持低电平输出,而VT6始终处于截止状态,VT9则维持导通,“博士”将一直前进,直奔“目标”。
制作与调试
本玩具的制作包括电路部分和机械部分。
红外发射器中的R32为WX11-3型轴式微调电位器,整机调试时,在3~8m范围内,用“目标”上的红外发光二极管对准“博士”上加透镜的光电三极管VT1(接收角约为30°)进行微调,使LM567的第8脚输出由高电平转变为低电平即可。适当调整R4、R8可改变接收灵敏厦。电动机正转与反转的周期可由多谐振荡器电路中的RC时间常数来确定。如有条件,最好使电动机与接收电路分别用独立的电池组供电,以有效地防止相互干扰。
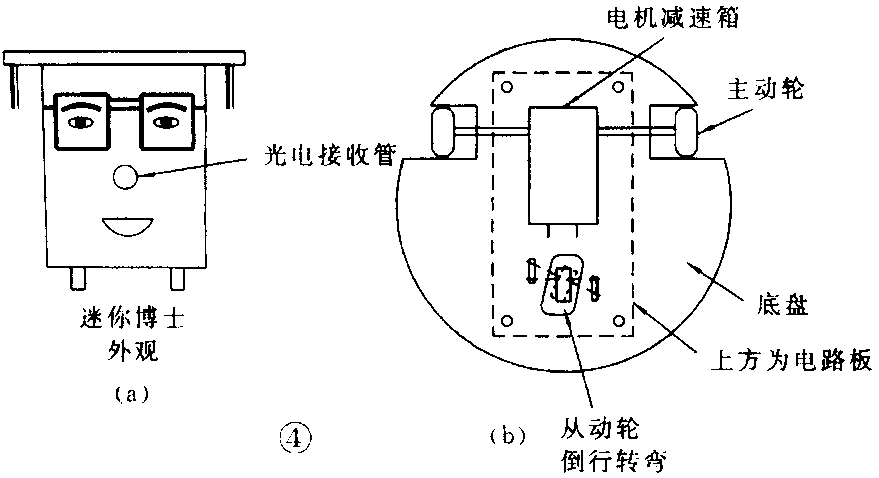
工艺制作可参考图4。图4(a)是“迷你博士”的外观示意图,中间为光电三极管(接收管),有条件时可配置短焦10~20mm透镜,以增进接收灵敏度。图4(b)为底盘结构示意图,机械部分可用旧电动玩具改制,选用带有减速箱装置的电动机驱动主动轮,改变电动机的电源极性,可作前进与后退两个动作。倒车轮、转弯轮可自行制作。车轴右侧定位,左侧有一个退位滑道,当电动机倒轮时,转弯轮逆时针旋转,左轴向前滑动,车轮向左转约30°,这样主体在倒车时,将作左转弯倒车运行,半径约0.5m,转弯半径读者可自行设计调整(可参考单通道玩具遥控赛车后退转弯装置)。“博士”造形可用卡片纸或其它轻质材料自行设计。
在制作时,读者可根据自己的喜好与兴趣设计玩具的外观,也可在电路适当的部位加装灯光及音响电路,使玩具更加具有魅力。(龚翔鹤 刘载维)