在一般的航模遥控系统中,主要的伺服机构有:比例舵机、电子调速器(仅用于电动模型)和电子开关。下面分别介绍它们的电路原理及作用。
一、比例舵机
比例舵机是使用最广泛的伺服装置,它可用于航空模型的升降和转向,车模或船模的方向控制及各种油动力模型的油门控制。由于使用的环境和控制的对象不同,对舵机的技术指标如航机的重量、体积、动作速度、输出力矩等要求也不同,但它们的电原理都相同。下面以北京新幻想遥控设备公司生产的CN-A1型高速、中扭矩比例舵机为例来介绍它的电路原理。图1是CN-A1比例舵机的外形图。它的主要性能指标是:工作电压4~6V,静态电流<3mA(4.8V电源时),反应速度0.16s/60°,转角2×45°,转矩3kg·cm,体积40×20×37mm,重量0.045kg。图2是它的电路原理图,虚线框内的电路是专用集成电路CN9068的内部电路。从图中可看出该电路是以CN9068为核心电路组成的,外围元件很少。
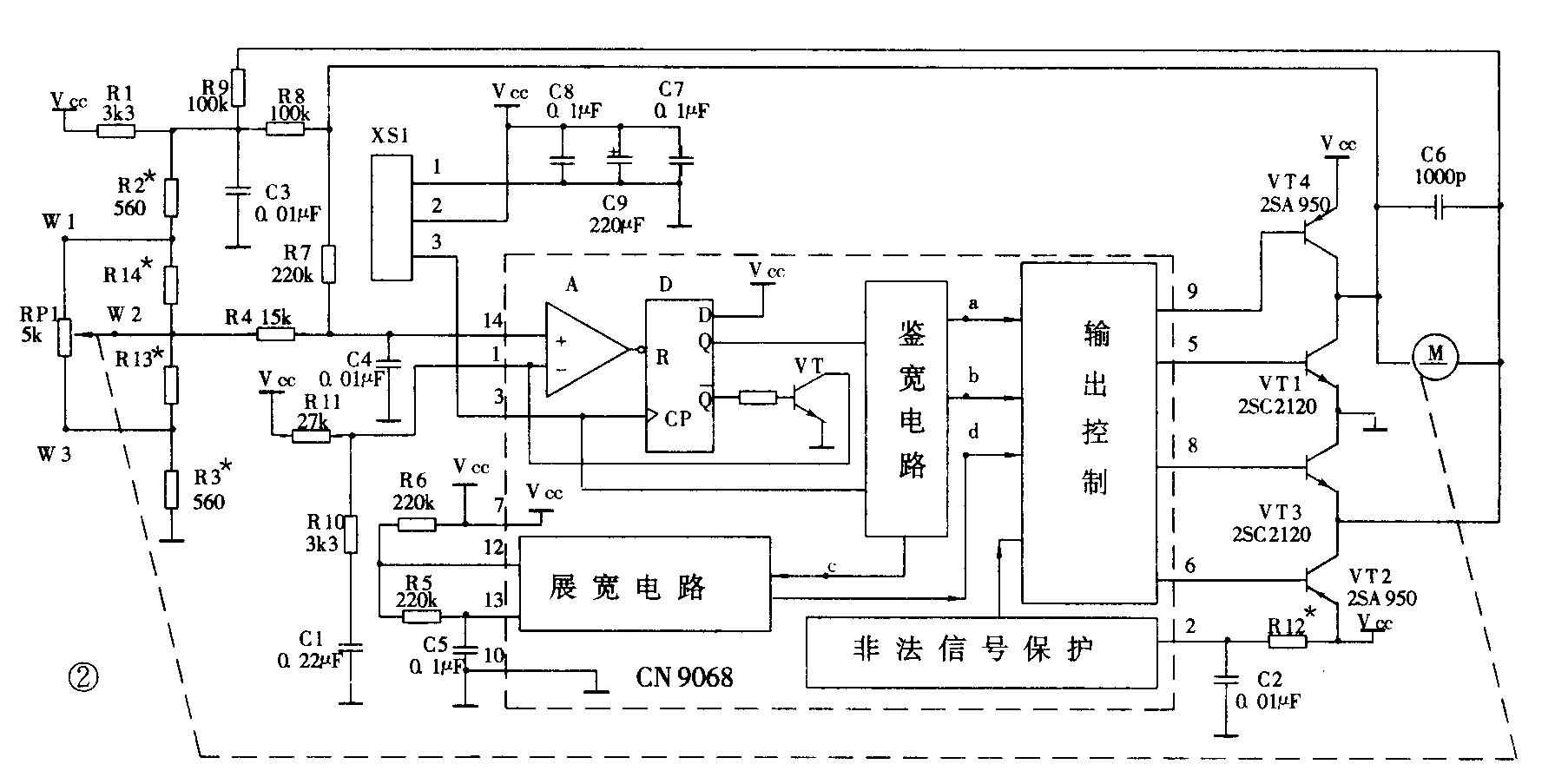
在CN9068的内部,电压比较器A和触发器D组成了一个单稳电路。在触发器输出端Q为高电平时,内部晶体管VT截止,电源通过R11、R10给C1充电。当C1上的电压加上R10上的电压(即1脚的电压)高于14脚的电位时,电压比较器A输出低电平,使触发器D的Q端变低,内部晶体管VT导通,C1上的电被放掉,电压比较器A恢复输出高电平,但触发器D的Q端保持低电平。当信号的输入端CN9068的3脚有脉冲信号上升沿到来时,使触发器D的Q端变高,触发单稳电路,重复前面的单稳过程。R10、R11、C1的参数和RP1电位器中点的电位决定单稳时间。
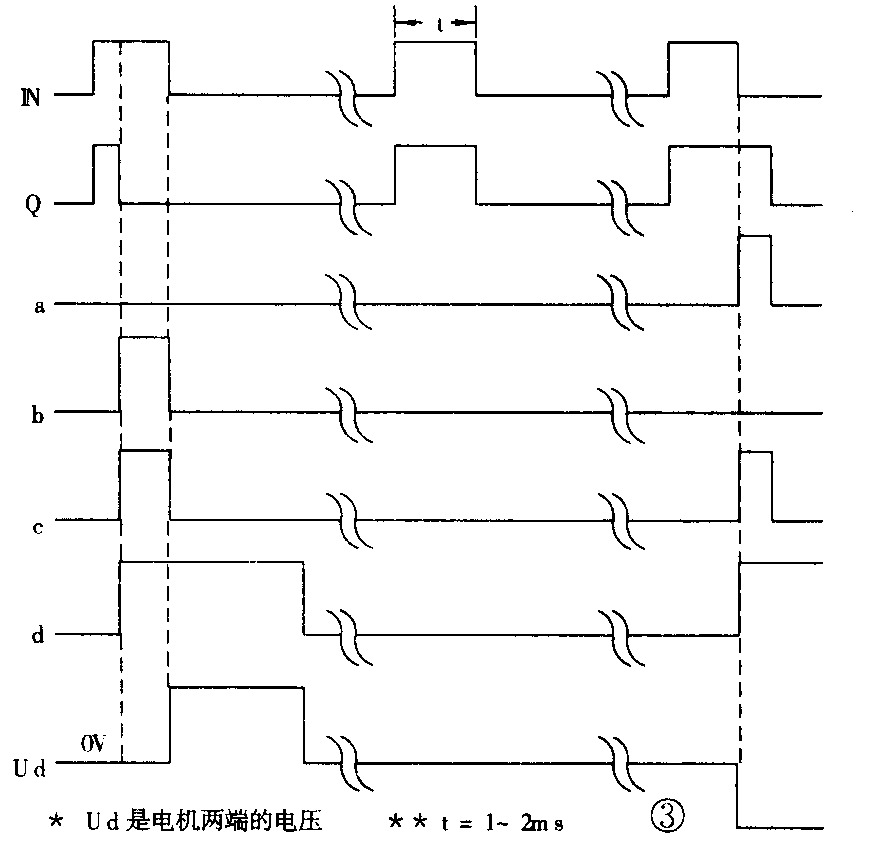
在上一期《浅谈航模遥控系统中的接收机》中我们曾介绍过,接收机解码后输出的信号如图3(IN)所示,该信号就是比例舵机的输入信号。下面我们来分析它的工作过程。
电路接通电源后,在没有信号输入时(CN9068的3脚保持低电平),触发器D的Q端输出低电平,内部晶体管导通,集成电路的1脚保持低电平,鉴宽电路的输出点a、b、c均无输出,输出控制电路也无信号输出,舵机不动。
当有信号输入时,输入信号的上升沿使触发器的输出端Q变为高电平“1”,这时Q为“1”,输入信号也为“1”,鉴宽电路仍无任何输出,舵机保持不动。若信号脉冲宽度大于单稳时间T\(_{Q}\)(Q端高电平时间),即单稳输出端Q的电平先于输入信号端变为低电平,则鉴宽电路的b点和c点有输出,见图3。c点信号经展宽电路将信号展宽后,送输出控制电路,控制提供给伺服电机的电压占空比;b点的输出则控制着电机的转动方向,这时电机正方向转动,通过机械装置带动电位器RP1使集成电路的14脚电位升高,导致单稳时间加长,直到单稳时间TQ等于输入信号脉冲时间t为止。在T\(_{Q}\)=t时a、b、c点均无输出,电机停转。
当信号脉冲宽度小于单稳时间(t<T\(_{Q}\))时,鉴宽电路的a点和c点有输出,见图3。c点信号经展宽电路将信号展宽后,送输出控制电路,控制提供给伺服电机的电压占空比;a点的输出控制电机反方向转动,通过机械装置带动电位器RP1使集成电路的14脚电位降低,使单稳时间变短,直到TQ=t为止。实现了输入信号的脉冲宽度与电位器物理位置的对应关系,也就是实现了比例舵机的功能。
当输入信号不是规定的信号脉冲,而是保持高电平或小于最窄信号脉冲的过窄脉冲时,“非法信号保护”电路使“输出控制电路”不能提供输出信号,保证舵机静止不动。图2中电容C2和电阻R12的大小决定关闭最窄脉冲的宽度。
图2中的R5、R6、C5决定展宽电路的展宽程度和反应的灵敏度。R7-R9是反馈电阻,适当地配置这三个电阻可使舵机反应灵敏、定位准确。R1~R3是分压电阻,对反馈量的大小有一定的影响,它们的阻值变化对舵机的中点位置、转动角度都有一定的影响。调整时,如舵机中点位置不对,应调整R11;如转动角度不足或过大,应调整C1或R10。若某一边的转动角度不足时,可减小R13或R14的阻值。R4的阻值对位置信号与电机反馈信号的取值比例影响较大,改变它的阻值后,其它电阻的参数也需随着变动。C3、C4是滤波电容,它们的容量对信号的作用速度有影响。C6为消除电机的电刷火花干扰而设。XS1是电源及信号输入插头,1脚为地线,2脚为电源正端,3脚为信号输入端。
二、电子调速器
电子调速器从功能上讲,可分为单向调速器和双向调速器。单向调速器主要用于电动空模上,作为动力电机的驱动电路,这种应用环境不需要电机换向。而双向调速器则用于电动车模和船模上。由于模型上的电机容量不同,所以需要调速器的输出驱动能力也不同,输出能力越强,造价也越高。
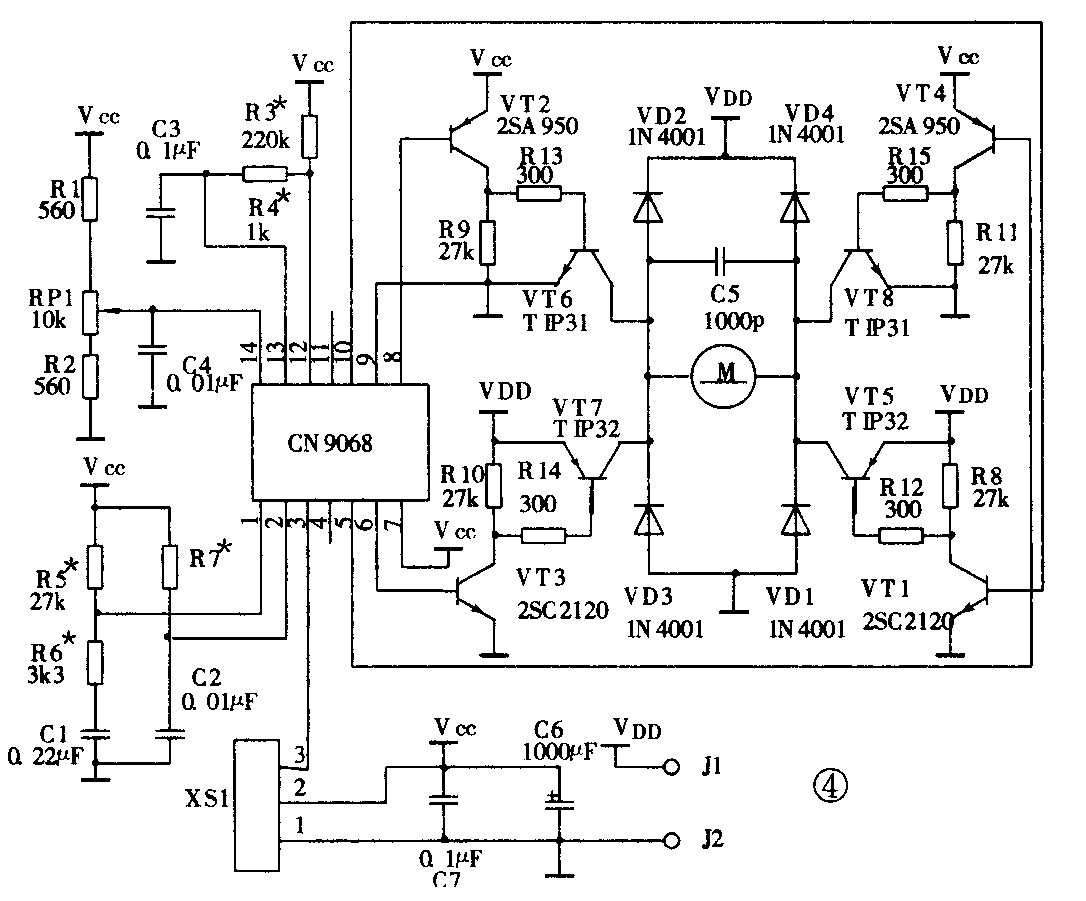
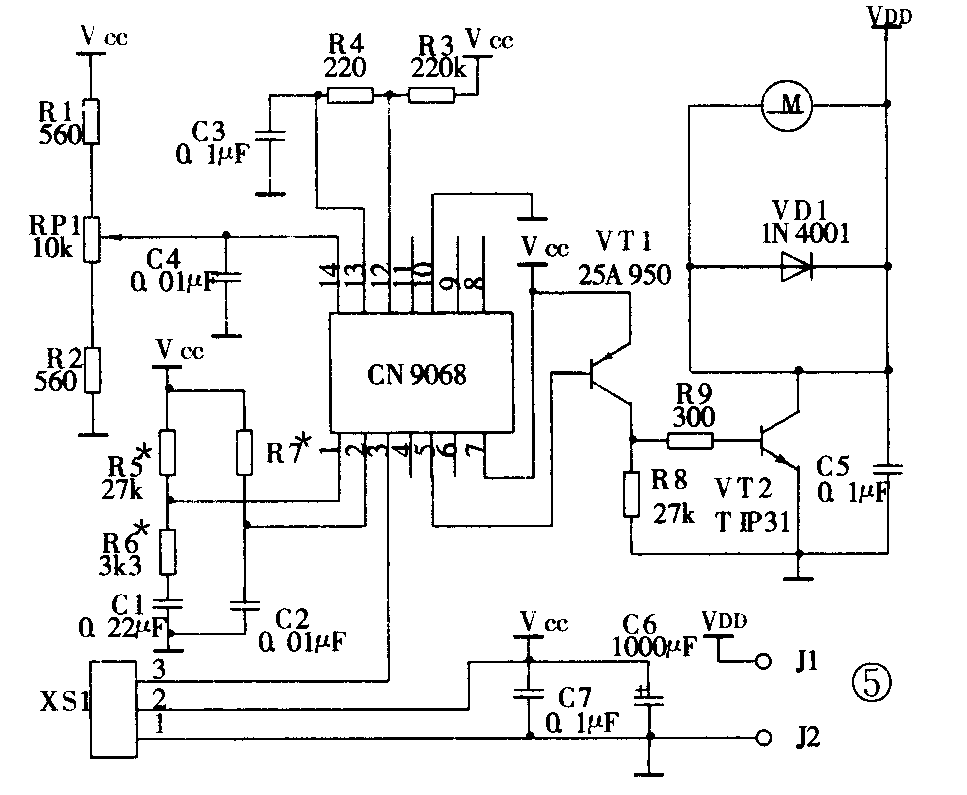
电子调速器在电路上实现并不难,图2的电路将电机与电位器RP1的机械连接断开,就是一个调速器,只是它的驱动电流只有0.8A,在航模驱动器中没有实用价值。图4是以CN9068为核心电路设计的双向电子调速器。图5是单向调速器。它们的工作原理和比例舵机的原理基本上一样,这里不再重复。图4和图5中的RP1是微调电位器,调整它可以使电机在希望的信号脉冲宽度下停转。它们的输出能力决定于驱动管的带载能力。图4中驱动管VT6和VT8用TIP31,VT5和VT7用TIP32,装有足够大的散热片,可输出5~8A的驱动电流。图5所示的电路同样可以提供5~8A的驱动电流。Vcc是控制电源,Vdd是动力电源。
三、电子开关
电子开关可看成是单向调速器的一个极限情况,它或是将电路接通,或是将电路断开,没有中间状态。电路实现要比电子调速器容易得多。图5的电路如果将控制通道装成开关通道就可实现开关功能。
电子开关的应用范围不仅仅局限于电动模型。它的负载不仅可以是电动机,还可以是电灯、发光二极管、继电器、发声电路等。(有关邮购消息见本刊今年第9期37页。)(赵建伟)