录像机数控磁迹是一种自动反馈跟踪过程,它应用了微机控制和数字伺服技术,使磁迹跟踪达到最好效果,向用户提供了高质量的重放图像。本文对日立VT-M888录像机的数控磁迹电路作一介绍,供读者学习参考。
录像机依靠鼓伺服电路控制视频磁头旋转,依靠主导伺服电路控制磁带运行,按标准磁迹图规格记录和重放视频信号。重放时,利用跟踪调节,在伺服电路的作用下,使视频磁头准确扫描磁迹,此过程称之为跟踪控制。自动跟踪实际上是应用于主导伺服电路中的一种跟踪调节技术,它立足在伺服电路锁定的基础上。
VHS录像机在记录机频信号时,其磁头鼓旋转相位锁定在输入视频信号的场同步脉冲上,该同步脉冲还触发伺服电路中的25Hz参考信号发生器,产生CTL信号(控制信号),并由CTL磁头记录在磁带的下边沿。这样,记录在磁头上的CTL信号就携带了视频场同步脉冲的相位信息,与磁带上记录的磁迹有对应的位置关系。重放时,鼓旋转相位以伺服电路中的25Hz参考信号为基准,与代表视频磁头位置的鼓相位脉冲进行比较,控制视频磁头的旋转相位。主导伺服相位基准也是取自同一个25Hz参考信号,通过比较和视频磁迹一一对应的CTL脉冲与基准信号的相位,控制磁带的行走,使视频磁头扫描中心与其对应的磁迹中心重合,这时视频磁头拾取的视频FM包络信号为最大,从而得到满意的视频图像。
但是,由于各种不同机型的录像机在电路上、机械制造上和调试上存在差异,即便是同种机型的录像机,在大批量生产中也存在多种偏差,如X值调整偏差、视频磁头安装偏差等,这些因素都导致不同机器录制在磁带上的磁迹图不尽相同。此外,磁带张力的变化,走带系统微小的差异等诸多因素,均有可能引起重放时视频磁头扫描轨迹中心偏离机频磁迹中心,致使磁头拾取的视频包络信号减弱。理论上,当扫描轨迹偏离1/2视频磁迹宽度时,视频亮度信噪比下降6dB。因此,必须针对上述原因造成的扫描轨迹偏移进行跟踪调节,以保证VHS录像机的可互换性。跟踪电路通过在主导电机相位伺服环路中插入一个跟踪单稳态电路,来实现伺服环路参考脉冲的时延,跟踪单稳态电路的时延量是可以调节的,有手动调节和自动调节两种。早期的录像机都采用传统的手动电位器跟踪调节,而日立VT-M888录像机是采用数控磁迹调校的方法实现自动跟踪的。
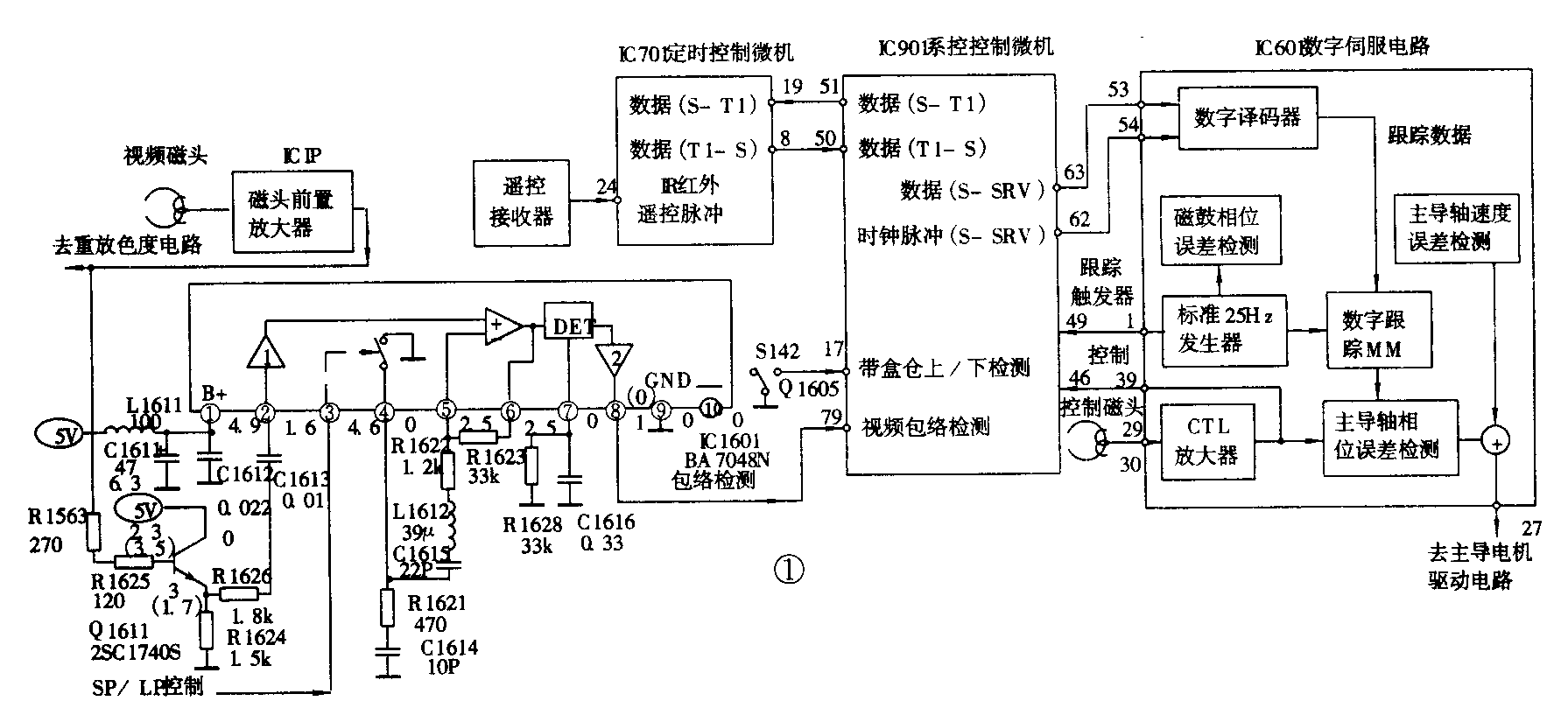
VHS录像机自动跟踪是依据反馈控制原理,检测被控量的大小,在这里就是磁头拾取磁迹的信号包迹大小,跟踪好,拾取信号包迹就大,计算出被控量相对于期望值的偏差。录像机中将包络信号进行检波,以检波直流分量最大为期望值。调节主导伺服环路中数字跟踪单稳态电路,从而就调校了主导电机的相位,以达到自动纠正磁带运行位置的目的。图1示出了VT-M888数控磁迹电路框图。图中IC701是定时控制微机,IC901是系统控制微机,IC601是数字伺服集成电路,ICIP是磁头前置放大集成电路、IC1601是视频包络检测集成电路。IC701、IC901、IC601集成电路之间信息交换都通过串行通信方式进行,红外遥控的数控跟踪信息通过IC701进入系统。图1中,电路其他部分和跟踪控制原理关系不大的内容省略了。下面叙述工作机理,把电路硬件和软件结合在一起讲述。
1.跟踪系统的初始状态
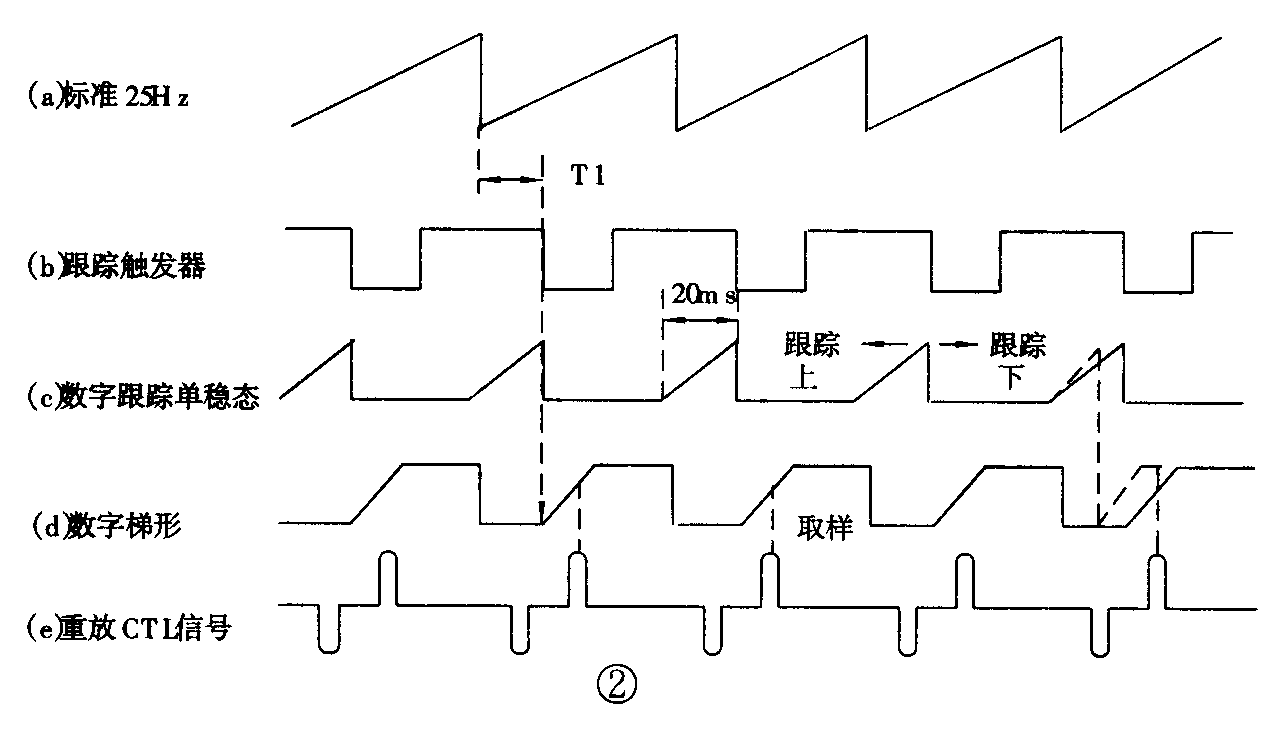
根据系统控制微机IC901中的程序设置,当磁带落入带盒仓后,IC901发出初值数据码给伺服电路IC601,在IC601中恢复跟踪单值延时初值。初值相对于标准25Hz信号延时T1<20ms,作为进入重放状态时控制主导轴相位的跟踪单稳预置延时量。参见图2所示的跟踪控制时序图。
2.包络电平检测
重放时,视频磁头拾取的FM磁迹信号送入ICIP磁头前置放大器进行放大和处理,然后输出给重放色度电路,同时送到IC1601对包络信号进入放大检波,成为反映视频FM包络大小的直流电压,再送至IC901-79脚,由此控制IC901进行比较判别,识别记忆最大包络电平的数据。Q16ll是作为缓冲放大器,因包络检测跟踪与SP/LP磁头种类有关,所以IC161的3脚输入录像机SP/LP状态控制电平。需要说明的是磁头放大器ICIP有两路FM包络输出,经AGC处理的和未经AGC处理的,送给IC1601的是未经AGC处理的信号,该信号同时送给重放色度电路。
3.寻找跟踪最佳位置
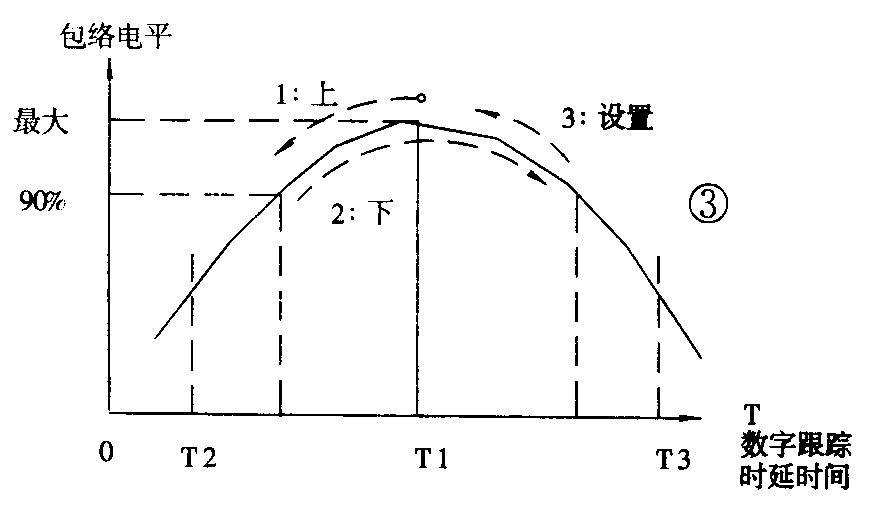
一旦自动跟踪开始,先执行跟踪上搜索过程。参见图3,IC901采用一个小的时间单位ΔT为单步间隔(ΔT<1ms),逐步减小以T1为初值的跟踪单稳延迟时间,使磁迹跟踪单方向变化;比较每一个单步执行过程中IC1601的包络信号检测电平,数字量化后取大值存入微机内存;下一个单步中包络电平再与存入的值比较,仍取大值存入内存,直至IC901找到包络电平下降到最大值的90%那个点,或单稳延时达到下极限值T2(T2=T1-13ms>0 )时,系统立即进入反方向的下搜索。下搜索仍以ΔT单步增加跟踪单稳延时,当找到包络电平在整个搜索过程中最大值的90%那个点或单稳延时到达上极限值T3(T3=T1+13ms)时,搜索停止。此刻内存中包络电平的最大值所对应的单稳延时量就是系统选择的最佳跟踪时延量。888机在自动跟踪的整个过程,多功能显示屏不断闪烁“AUTO TRACKING”字符。调整过程结束该字符才停止闪烁。
4.跟踪延时执行
IC901-63脚向伺服电路发出最佳跟踪延时数据码,由IC601-53脚进入数字译码器译码,数字译码器输出跟踪延时调节量,改变数字跟踪单稳相对于标准25Hz信号的延时,数字跟踪单稳的下降沿又控制了数字样形波的相位,因此CTL脉冲在数字梯形波斜边上的取样电平随之改变,见图2。由取样电平决定的主导相位伺服环路的误差控制电压纠正主导轴电机旋转相位,调整磁头磁带相对位置,系统进入最佳跟踪状态。在整个重放过程中,自动跟踪功能始终在IC901内部程序的支持下,密切监视输入79脚的包络检测电平的变化,准备再次启动自动跟踪电路。
5.自动跟踪的启动
①人工启动:重放时操作者按下红外遥控器上的自动跟踪按键,系统立即开始自动跟踪。
②自动启动
(a)磁带落入带盒仓后,带盒仓状态检测开关S142的状态变化信息送入IC901-17脚,系统作了进入初始状态的准备,待收到重放控制信号时立即启动。
(b)当自动跟踪完成后,若IC901判定重放过程中包络电平小于期望值的81%,并且持续时间下降到达设定值(SP方式:4s,LP方式:7s)时,自动跟踪再次启动。
(c)当重放方式从LP向SP转换时,跟踪必然发生偏移,自动跟踪再次启动。
为了方便用户和简化程序执行过程,跟踪调整完毕后,IC901不受加载、卸载、停止、快进、倒带转换等的影响,仍保存原有的跟踪数据。
自动跟踪系统出故障一般表现为图像不时出现雪花噪声,与主导轴伺服相位失锁相似,但是重放声音正确。同时多功能显示屏“AUTO TRACKING”字符不断闪烁,这是区别主导伺服环路故障和自动跟踪故障的重要依据之一。(於志根)