随着电子技术的发展和无线电航模遥控器的国产化,广大青少年已有条件参加航模运动。同时也有更多的人想了解航模遥控设备。本期起我们将以国产CN-A1型航模遥控器为例,陆续介绍航模遥控器及遥控设备与模型配套使用的有关知识。
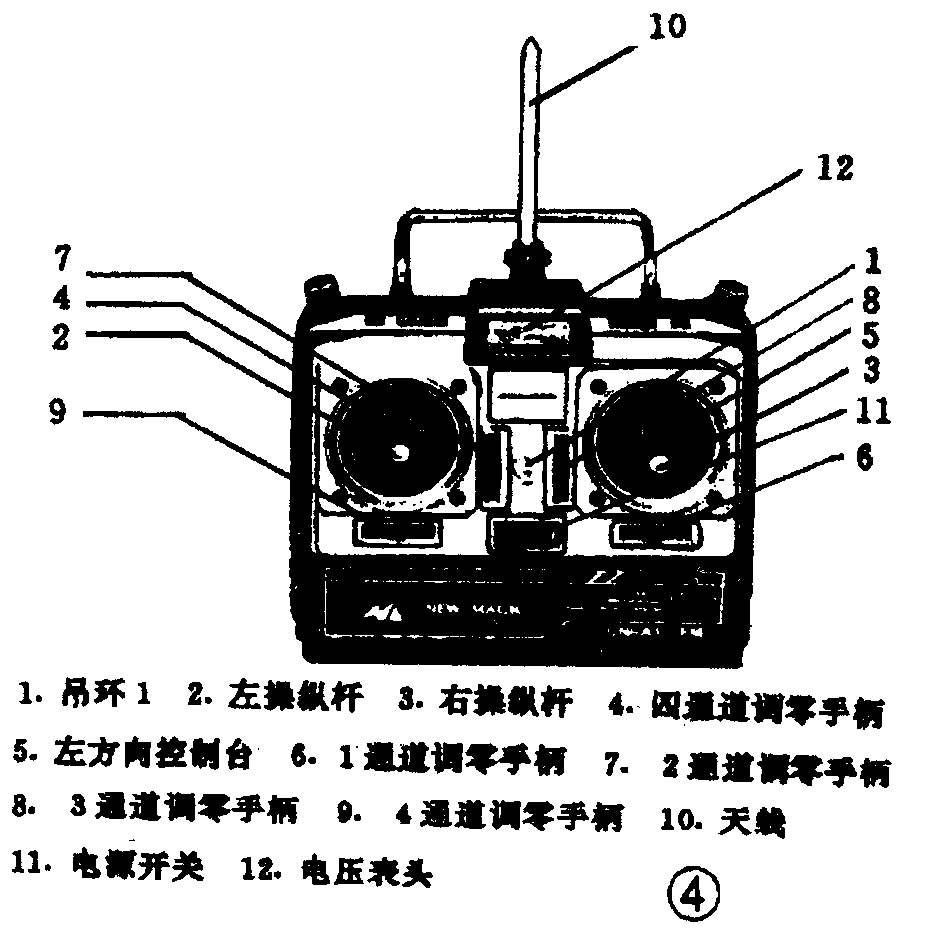
航模遥控设备采用了数字编码、解码及无线电发射、接收技术。通过航模遥控器,可以在人远离模型的情况下,准确地控制模型做各种动作。图1是无线电航模遥控系统示意图。它主要包括发射机、接收机、伺服执行机构三部分。接收机和伺服机构可以安装在汽车、舰船、飞机等各种模型上。
本文介绍发射机电路。
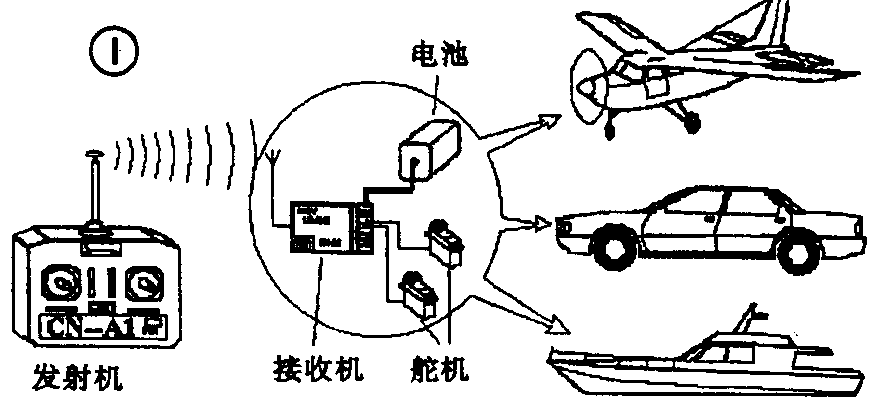
发射机主要由编码和调频发射两部分电路组成。编码电路的任务是产生一个编码周期(帧周期)为20ms的脉冲串。其中每个脉冲的宽度是0.5ms,每两个脉冲的间隔是1~2ms。波形如图2(a)所示。每帧中第一个脉冲上升沿到第二个脉冲上升沿的间隔时间是第1个通道的控制信息;第二个脉冲上升沿到第三个脉冲上升沿的间隔时间是第2个通道的控制信息;以此类推。
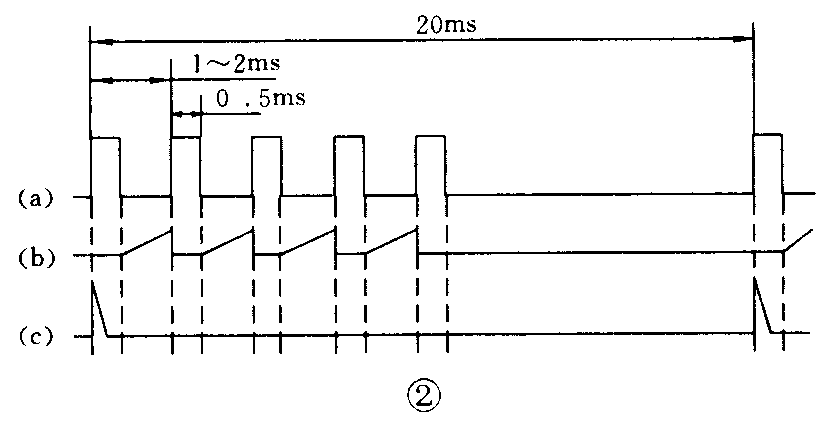
发射电路的任务是,把编码电路产生的脉冲信号作为调制信号通过载频发射出去。图3是CN-A1航模遥控器发射机电原理图。图中左上方小虚线框内是电源稳压电路。其中VDD是发射机电池电压,它直接供给发射机功放部分。经过稳压后的电压是VCC,它为编码和调制电路提供一个稳定的电压,以保证编码信号和调制频偏的稳定。这部分电路是由三端稳压器78L05和一些滤波电容组成的。
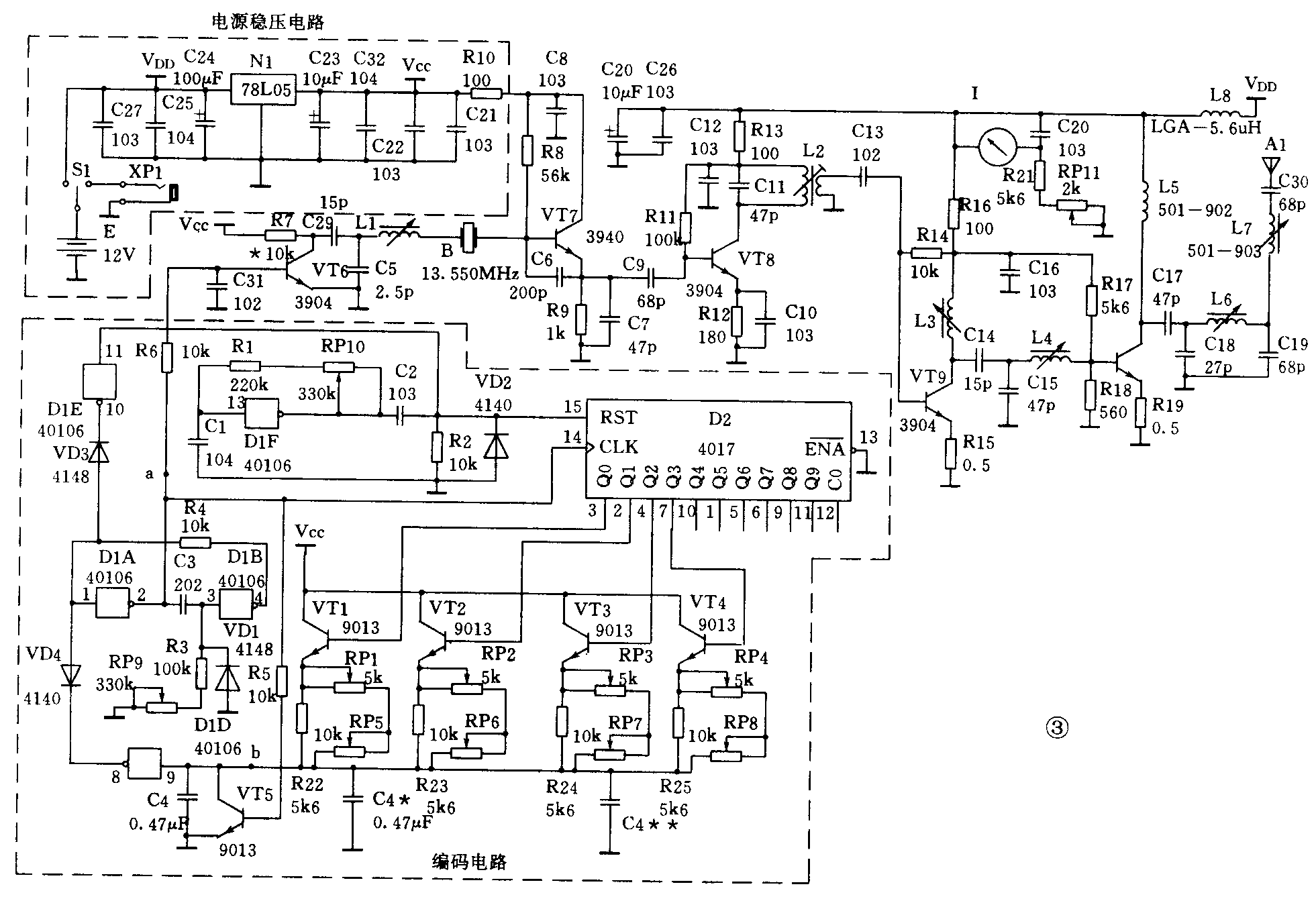
图3下方大虚线框内是编码电路。D2是十进制移位计数器4017。3、2、4、7、10、1、5、6、9、11各脚依次是Q0~Q9数据输出端。一般情况下使用,12脚悬空,13接地;15脚是清零端,15脚输入高电平时,无论计数器原来是什么状态都被清零,这时只有Q0输出高电平;当15脚输入低电平时计数器开始计数,这时在14脚输入一个正脉冲,Q0变为低电平,Q1变为高电平;再输入一个正脉冲,Q1变为低电平,Q2变为高电平;当14脚输入第10个正脉冲时,计数器回到初始状态。D1是六施密特触发器40106。电路中只用了5个触发器。每个触发器的编号按顺序为D1A~D1E。其中触发器D1F与RP10等组成一个周期为20ms的振荡器;输出经C2送到4017第15脚用来确定脉冲串的帧周期,波形如图2(c)。D1A与D1B及RP9等组成一个单稳电路;在a点的输出波形如图2(a),调节RP9可以控制每个脉冲的宽度。信号送到4017第14脚,这样每一帧脉冲中的各个脉冲前沿就会使4017的Q0~Q3依次输出高电平;并通过VT1~VT4及RP1等电位器向C4充电,调节RP1等电位器就可改变b点由低电平变成高电平的时间,波形如图2(b);这样就控制了D1D输出低电平的时间;这个低电平通过VD4对单稳电路中的D1A输入端箝位,从而也就控制了每两个脉冲的时间间隔。触发器D1E输入端接帧周期信号,输出端接二极管VD3,用一个负脉冲来触发单稳电路产生每个脉冲串中的第一个脉冲。电路中a点的脉冲信号还有一路通过R6送到发射电路作调制信号。发射电路采用调频制式。其中VT6是调频键控管;以VT7与晶体B为核心组成本振电路;经过调制的本振信号,经C7耦合到由VT8及L2等组成的倍频电路进行二次倍频。倍频后的信号,再由L2次级输出送至由VT9、L3组成的功放推动级放大。VT10是射频功放管。
发射机外形见图4,它的面板上有一个系挂带的吊环“1”。操作者手持发射机,两手拇指分别放在“2”、“3”两个操纵杆上。操纵杆下端分别嵌在“4”、“5”两个控制台中。控制台分万向型和单向型。万向型操纵杆可以向任意方向运动;能控制两个通道。单向控制台只能向一个方向运动,可以控制一个通道。一般规定,右操纵杆左右方向是1通道,前后方向是3通道。左操纵杆前后方向是2通道,左右方向是4通道。“12”是工作电压指示表头,目的是当发射机电源电压下降时及时提醒操作者收回模型,以防不必要的损失。表盘刻度分红、黄、白三种颜色,表针指在白区时发射机可正常工作,指在黄区时发射机工作电压只有7V~8V,这一区域是告警区,操作者应及时回收模型。表针指在红区时发射机已不能正常工作,应该给镉镍电池充电。(安军)