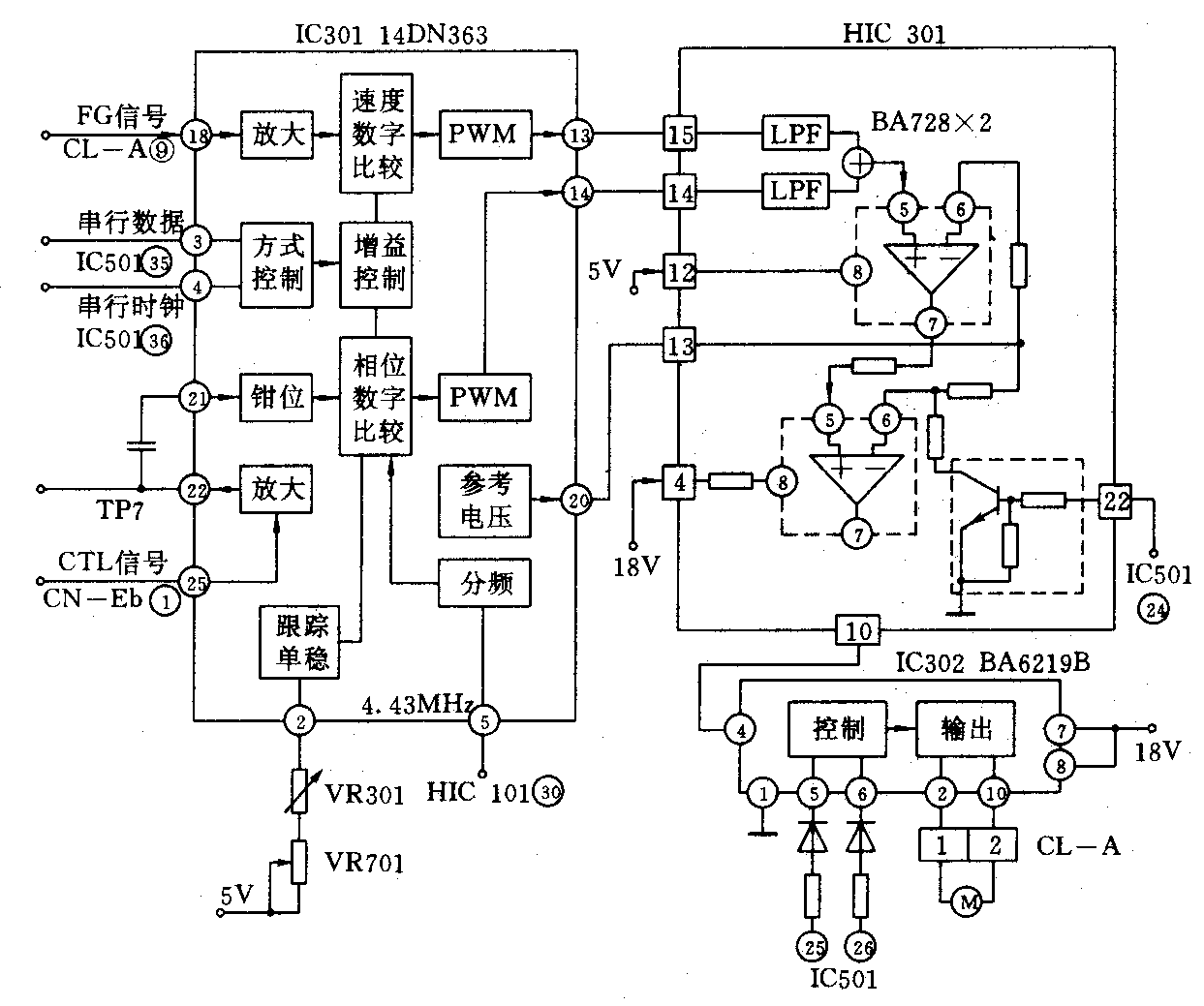
富丽VIP-3000HC放像机是投放我国市场较早、且社会拥有量较大的一种单放机,如今已有相当数量的机器进入维修期。为了适应该类机型日益迫切的检修需要,笔者参照实物,绘出了该机主导轴伺服电路的原理框图(见附图),并结合近来的维修实践,对该机的主导轴伺服电路原理及维修实例作一介绍,以供同行参考。该机主导轴伺服电路包括:速度伺服电路、相位伺服电路、速度转换控制电路及主导轴电机驱动电路等。下面首先简述这部分电路的工作原理,然后结合实例谈一下检修伺服电路的思路。
主导轴伺服电路原理
1.速度伺服电路
主导轴的速度伺服即是对主导轴的旋转速度进行自动控制,亦即对磁带的行走速度进行自动控制。在放(录)像过程中,使磁带的行走速度始终保持在23.39mm/s(PAL·SP方式)。
VIP—3000HC放像机主导轴伺服电路主要是以IC301(14DN363)为中心,加上二次集成电路HIC301和主导轴电机驱动集成电路IC302(BA6219B)以及安装在主导轴电机内部的FG(频率发生器)线圈等组成,见附图。
主导轴电机一旦转动,FG线圈便会产生反映主导轴电机旋转速度的FG信号。该信号经接插件CL-A之⑨、电阻R304、电容C303送入数字伺服处理中心IC301的经FG放大整形,成为方波信号后送入速度数字比较器进行比较,经比较器产生的误差数据进入脉宽调制器(PWM),用该误差数据控制峰值电平为5V、周期约为28μs的PWM信号的脉冲宽度(不改变脉冲周期),即改变PWM脉冲下降沿时间,把电机的转速误差反映到PWM信号脉冲宽度上。在标准转速时,PWM脉冲正负半周相等,即各占一个周期的1/2。
从IC301输出的主导轴速度控制PWM脉冲,进入二次集成电路HIC301,经RC组成的低通滤波器(LPF)平滑后,便产生出速度误差电压。这样,主导轴旋转速度的变化就反映在速度误差电压上。该电压与主导轴相位误差电压经加法器叠加后,送入运算放大器(BA728)的同相输入端⑤,与⑥的参考电压(来自IC301之HIC301之输入)比较后从⑦输出。在重放状态时,该伺服控制电压经过速度转换控制电路、电机驱动电路(详见下述),完成对主导轴电机旋转(速度和相位)的精确控制。
2.相位伺服电路
在放像过程中,为了使一对视频磁头A、B准确地扫描记录在磁带上所对应的视频磁迹CHA、CHB,获得最佳的重放图像质量,仅有主导轴速度伺服一个环路是不能胜任的。让A磁头扫描CHA磁迹,B磁头扫描CHB磁迹,这就是由主导轴重放相位伺服电路来完成的任务。
主导轴电机的相位伺服电路组成与速度伺服电路相似,但比较信号不是FG信号,而是由控制磁头从磁带上拾取的CTL信号。基准信号是经分频和跟踪单稳态电路(MM)处理而来的25HZ晶振信号。
控制磁头从磁带的下边沿拾取的CTL信号,经接插件CN-Eb①、电容C307进入IC301的,经CTL放大后从输出,再经C315进入,钳位后送入相位数字比较器中,与基准信号进行比较便可获得相位误差数据。用此数据去改变脉冲周期约为28μs的、峰值电平为5V的PWM脉冲的下降沿时间,也就是把基准信号和比较信号间的相位差值反映到PWM输出的脉冲宽度上面。该脉冲从输出,直接进入二次集成电路HIC301,通过低通滤波器平滑后变成相应的直流电压,再经过加法器叠加在速度伺服电压上送入BA728的同相输入端⑤脚。至此,速度伺服环路与相位伺服环路就汇总到同一通路上。
由于各个机心在生产和装配过程中难免产生误差,各机心的X值(即视频磁头扫描磁迹的出点至CTL控制磁头的中心点距离)不可能做到完全相同,这就影响机器对磁带的互换性。通过在电路中设置时间常数可调的跟踪单稳态电路,就可以纠正这一偏差。跟踪单稳态电路通过接在②脚上的可调电阻VR301及电位器VR701,即可调节其时间常数(亦即改变跟踪单稳态输出脉冲下降沿的相位)。VR301设在机内,出厂时已预置在标准状态,在维修中不要轻意调节。VR701是设置在前面板上的手动跟踪调节电位器,可由用户根据图像质量随时进行调整。
3.速度转换控制电路
由于该机主导轴电机不仅担任重放时控制磁带按标准速度和相位运行的任务,而且还要完成装/出盒、快进、倒带等任务,这就要求在重放状态之外,主导轴电机要以较快的速度旋转。为此,该机设置了以HIC301为中心组成的速度转换电路。
在重放状态时,运算放大器⑦脚输出的主导轴伺服控制电压,经一只56kΩ的电阻送入另一运算放大器的⑤脚,与⑥脚的重放参考电压比较后从⑦脚(与HIC301之⑩脚直接相连)输出。该输出电压进入IC302(BA6219B)的转矩控制端④脚,对主导轴电机实施速度和相位的控制,以实现视频磁头对磁迹的准确扫描(即跟踪),获得稳定、良好的图像。
除重放状态以外,当需要主导轴电机快速旋转时,HIC301之(受控于系统控制集成块IC501),由低电平变为高电平,该高电平经HIC301内反相器,使运放器的反向输入端⑥脚变为低电平,迫使运放器输入端电位差(即⑤脚电位减去⑥脚电位)增大。这样运放器输出端⑦脚就输出较高的电压去控制IC302④脚,让电机高速旋转。
4.主导输电机驱动电路
主导轴电机的驱动由IC302(BA6219B)担任。该块为双向电机驱动IC,内部有逻辑控制电路,在系统控制集成块IC501、的控制下,使电机正转或反转。
该块④脚为转矩控制输入脚,⑤脚、⑥脚为电机反、正转控制脚,②脚、⑩脚为电机反、正转驱动输出脚,分别接在主导轴电机的两端。
要使IC302②脚、⑩脚有电机驱动电压输出,除必要的电源电压外,还必须同时满足两个条件:(1)第④脚应大于0伏,并且电位越高,②、⑩之间电位差越大,电机的转速就越高。(2)⑤脚和⑥脚其中一个为高电位时,另一个必须是低电位。只有同时满足上述两个条件,②脚、⑩脚才能输出电机驱动电压。
在重放状态下,IC302⑥脚从IC501得到正转高电平指令,同时,IC302④脚从HIC301⑩脚获得约3V的伺服控制电压,主导轴电机就在伺服电路的控制下以标准速度和相位旋转。
在入盒(出盒)及倒带(快进)状态时,IC302⑤(⑥)脚保持高电平,④脚从HIC301⑩脚获得约17V的转矩控制电压。由于BA6219B输出的电机驱动电压与转矩控制电压成正比,所以②、⑩脚之间就将输出约17V的电机驱动电压,使电机快速旋转。
检修实例
例1 故障现象:重放伴音正常,图像上有周期性杂波带。
分析与检修:根据该机的故障现象综合判断,以下两方面不良都可能造成该故障现象:一、重放状态下磁带的运行通路不良(例如:入、出带导轴脏污、转动不灵活,控制头错位等),将会造成磁带运行不平衡,即使磁鼓伺服电路和主导轴伺服电路都工作良好,也不能始终保证机频磁头与磁迹的良好跟踪。二、主导轴的相位伺服环路不良。从重放伴音正常分析,主导轴的速度伺服环路工作是正常的,如果磁带行走速度有偏差,重放的伴音就会发尖(带速偏高)或发闷(带速偏低)。
通过上述分析,已把检查的重点缩小到了两个方面。本着先易后难的原则,首先对磁带通道进行检查和清洁,结果故障依旧,说明故障部位在主导轴相位伺服电路。
由于带速正常,故障点应在从控制磁头至低通滤波后面的加法器的这段电路中。测量伺服集成电路IC301中主导轴相位伺服通路的各有关脚发现只有电压异常。是主导轴相位PWM脉冲输出端,它的脉冲周期约为28μs,也就是说频率约为35kHz,这么高的脉冲频率用万用电表测量得到的是平均电压,应在2.5V左右。然而实测该脚电压在2V至5V之间跳变,周期在1秒以上,显然是不对的。继而检查该脚电压异常并非外围元件引起,因此可断定IC301损坏。更换IC301后,机器恢复正常。
例2 故障现象:同例l。
分析与检修:由于故障现象与例1相同,所以首先采取例1中所述方法,清洁后同样没有奏效。继而在重放状态下测IC301各有关脚电压,发现在1.7V左右抖动(正常值在2.5V左右),②脚为0V(正常值为0.5~2.5V连续可调),且调节面板上的跟踪(TRACKING)旋钮无变化,这表明故障点很可能就在IC301②脚的外围电路中。②脚通过可调电阻VR301、R301、接插件CN—1⑤、前面板上插件CL—1⑤、电位器VR701、CL-1③与5V电源相接。其中任何一处开路都会造成IC301②脚为0V。
顺上述路径检查器件,其结果是VR301开路。更换之,故障排除。
由于录像机的伺服系统电路是一个锁相环路,类似于电视机中的AGC电路,电路上相互联系性很强,往往是一处有故障,就会影响到整个环路的工作状态,这就给确定故障部位和查找故障点带来一定的难度。但是,各伺服环路出故障时,反映在电视屏幕上的现象不尽相同,例如:主导轴速度失控,不仅图像不正常,同时会伴随有声音的异常;可是当相位失控时,伴音应该是正常的。所以,在检修时,要根据故障现象的不同之处,结合电路原理,具体分析判断故障部位,逐步缩小检查范围,最终排除故障。(程东安)