以往的比例遥控电路,无论是采用频分制,还是时分制,但由于使用模拟信号进行传输,所以它们在控制通道数、抗干扰能力、控制精度等性能上不可能有很高的指标。本文向读者介绍一种采用AN801、AN802等数字集成电路组成的243路数字比例遥控电路。读者可根据本文介绍的原理,容易地扩充或缩减控制路数及控制精度(执行单元的执行步数)。由于AN801、AN802采用数字编码传输,每次接收编码后经校验正确才输出,故杜绝了误控。特别适用于军事、工业、科研、模型遥控、机器人遥控等多种领域。为了便于程序控制,我们在发射机电路中还设计了与计算机联接的接口。
主要器件介绍
为了方便,对于器件的高阻或开路状态我们用符号“-”表示。
本电路的核心器件是AN801、AN802编译码电路。它具有集成度高、结构简单、性能可靠的优点,且采用脉冲宽度编码来传输各路信号,有很好的鉴别能力。
AN801、AN802引脚功能见图1,两器件的第1~5脚为地址编码线,每线可接“0”、“1”、“-”(高阻)三种状态,可组成3\(^{5}\)=243种编码,故两片配合可组成243路控制。AN801的第6、7、9、10脚为数据编码线,每线可接“0”、“1”两种状态,形成4位16种编码控制指令。第14脚为发送控制端,接低电平则地址与数据编码通过第15脚串行输出;接高电平不输出。AN802的第12~15脚为数据译出线,当两块电路的地址编码相同时其译出状态与AN801的数据编码状态相同。第一次译出码存入AN802的内部寄存器,第二次译出码与第一次译出码比较,若两次状态相同,则在第11脚输出一个正脉冲,指示输出有效。在本电路中我们利用这一脉冲控制向执行电路发送指令。CT、RT、RS是AN801的外接振荡元件,提供内部时钟。顺便指出:AN801、AN802与MC145026、MC145027引脚功能完全相同,可以互换。

CD4520是双四位2~16进制计数器,在接收机电路中与CD4027(双JK触发器)及CD40109B(三态门)配合,以产生AN802和CD4067的地址码。CD40190B在发射机中作2/3态译码器用,以便使AN801能够与计算机配合,详细电路在“电路原理”中介绍。
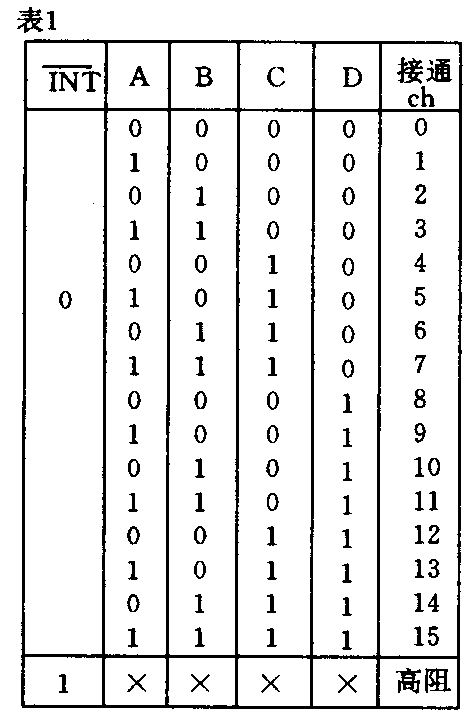
CD4067是双向16∶1多路切换器,如果以本电路实现16通道遥控,可仅使用6块切换器,并将AN802的11脚信号反向后直接控制CD4067的INT-端而省去三态门电路IC3,地址产生器部分亦可大大简化。CD4067的真值表见表1。
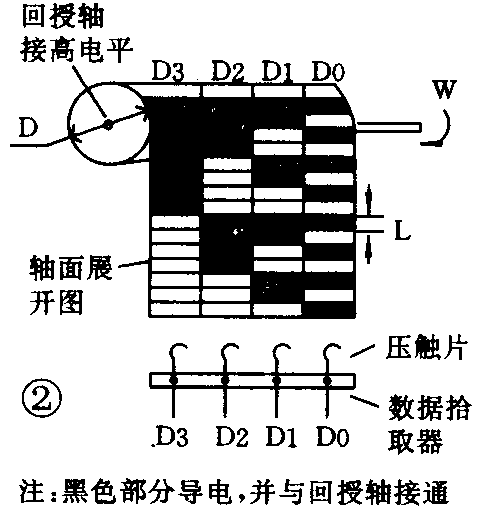
回授码产生器需要自制,读者可根据需要选择柱式、圆盘式、直线式或光电式等各种形式,在此我们只给出柱式的制做方法,以供参考。制做方法参见图2,中轴采用导电材料制成并接电路高电平。图2中的下垂面是轴面的展开图,黑色部分导电,白色部分绝缘。因而当轴转至不同角度时,数据拾取器可拾取相应的二进制码。
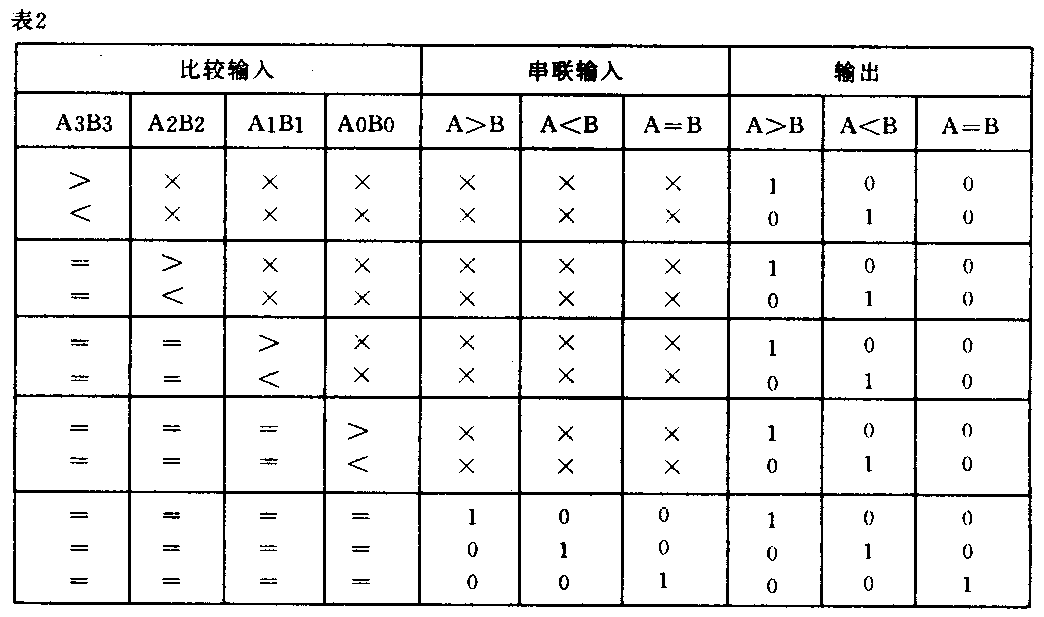
CD4585是4位二进制数据比较器,当输入端“A>B”、“A<B”接低电平而“A=B”接高电平时,若A路输入数据大于B路输入数值,“A>B”输出端输出高电平;“A<B”输出端输出低电平,否则相反,当A路数值等于B路数值时,“A=B”输出端输出高电平(其它情况下输出低电平),“A<B”、“A>B”输出端输出低电平,真值表见表2。
电路原理
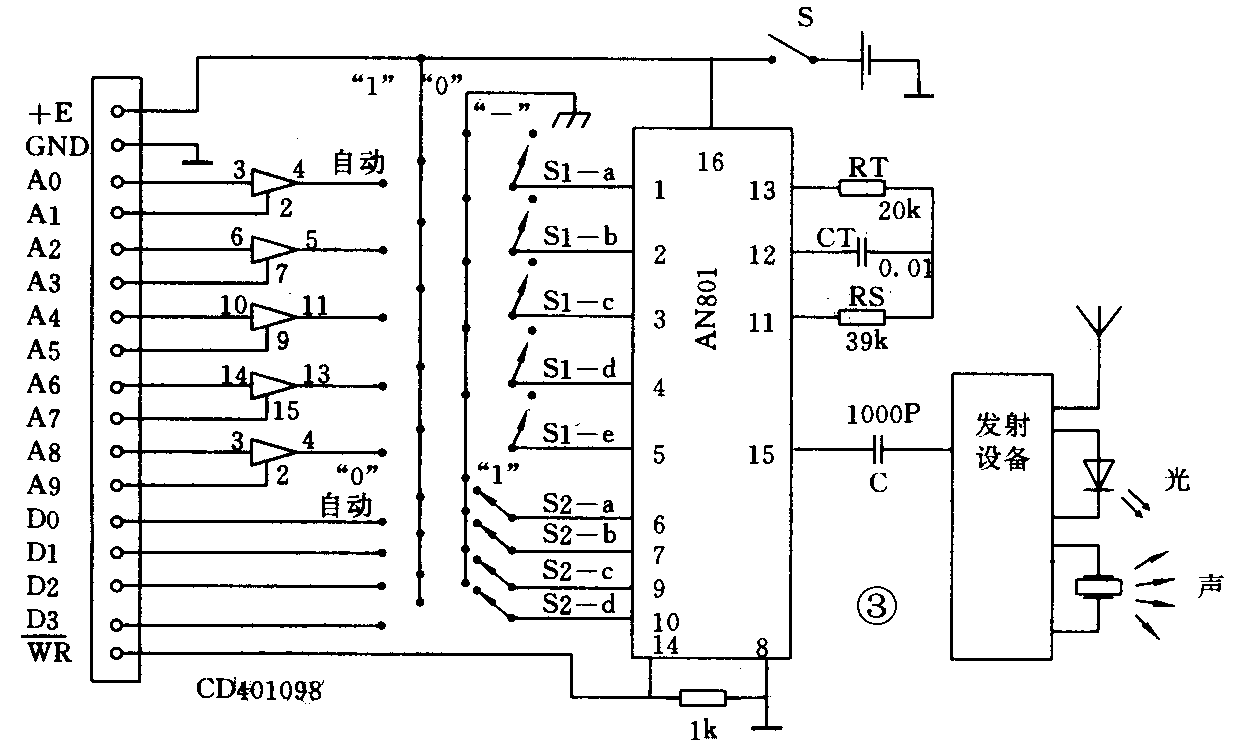
发射机:发射机电路如图3所示,其中多路开关S1作手动地址编码器,每位可接“自动”、“1”、“0”、“-”4个位置。S2作数据手动编码器,每位可接“自动”、“1”、“0”三个位置。“自动”用来与计算机配合,其余状态实现对AN801的手动编码。“自动”位置时三态门电路对来自计算机的二进制码进行翻译,真值表如表3所示。
表3
A7 A6 A5 A4 A3 A2 A1 A0 A5'A4'A3'A2'A1' 通道号
0 0 0 0 0 0 0 0 — — — — — 1
0 0 0 0 0 0 1 0 — — — — 0 2
0 0 0 0 0 0 1 1 — — — — 1 3
0 0 0 0 1 0 0 0 — — — 0 — 4
0 0 0 0 1 0 1 0 — — — 0 0 5
0 0 0 0 1 0 1 1 — — — 0 1 6
0 0 0 0 1 1 0 0 — — — 1 — 7
0 0 0 0 1 1 1 0 — — — 1 0 8
0 0 0 0 1 1 1 1 — — — 1 1 9
0 0 1 0 0 0 0 0 — — 0 — — 10
┆ ┆ ┆
1 1 1 1 1 1 1 1 1 1 1 1 1 243
由表3可知: A\(_{2n}\)A2n+1两位对应A'n+11位;状态“00”对应“-”;“01”对应“0”;“11”对应“1”。这样计算机送来的2进制码就被译成了三态码。当A0~A9,D0~D3全部送到后,WR-送来低电平使AN801发送数据。在手动编码时,14脚所接的下拉电阻使AN801维持发送状态。发射设备可以是无线电波输出型的,光输出型的和声输出型的,由用户根据需要选择,也可用二根线进行243路有线比例遥控。
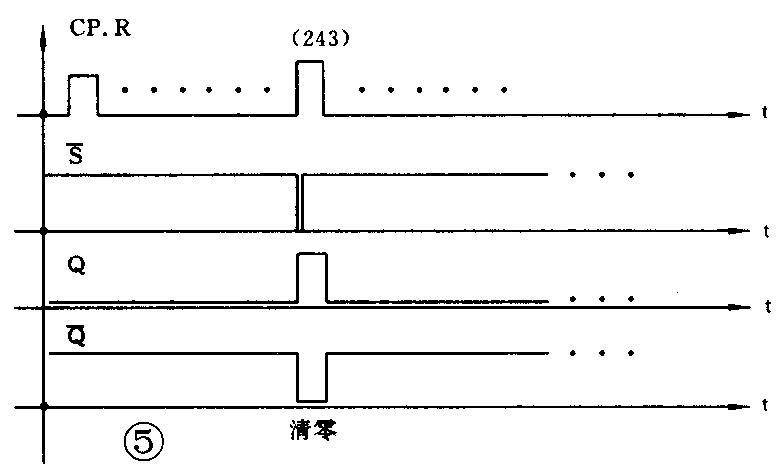
接收机:电路原理如图4所示,其中地址码产生器原理如下,五片双JK触发器产生如真值表3中A0~A9那样的编码,(每片一组进行“00”→“01”→“11”→“00”三状态循环计数,由Q1作下一组的时钟脉冲),再由三态门译成A1'~A5'所示的编码。读者可根据原理图及JK触发器的状态方程Qn+1=JQn+K-Q-n自行分析得出。CD4520进行从(00000000)\(_{0}\)~(11110010)242的计数,产生与A1' ~A5'同步的二进制地址编码,以便与CD4067配合。清零电路的原理是这样的,当二进制计数器计至表1(11110011)243的瞬间,A7、A6、A5、A4、A1、A0均为高电平,经与非门后为低电平(平时为“1”),将基本的RS触发器Q端置“1”,立即将A7~A0清为“0”。此时时钟CP尚维持在“1”,Q-为“0”,使Q保持“1”,直到CP为“0”后,Q-为“1”(S-端在Q变为“1”的上升沿已回到了高电平),Q重新回到“0”,清零过程结束。清零脉冲的宽度与时钟脉冲高电平期等宽。以上过程波形图如图5所示。这样做的原因是由于被清零器件多,时间参数差别大,若直接用S信号微分清零法,可能造成清零不彻底。如Q7清掉了Q2尚未清掉而微分脉冲已消失,使控制命令张冠李戴。
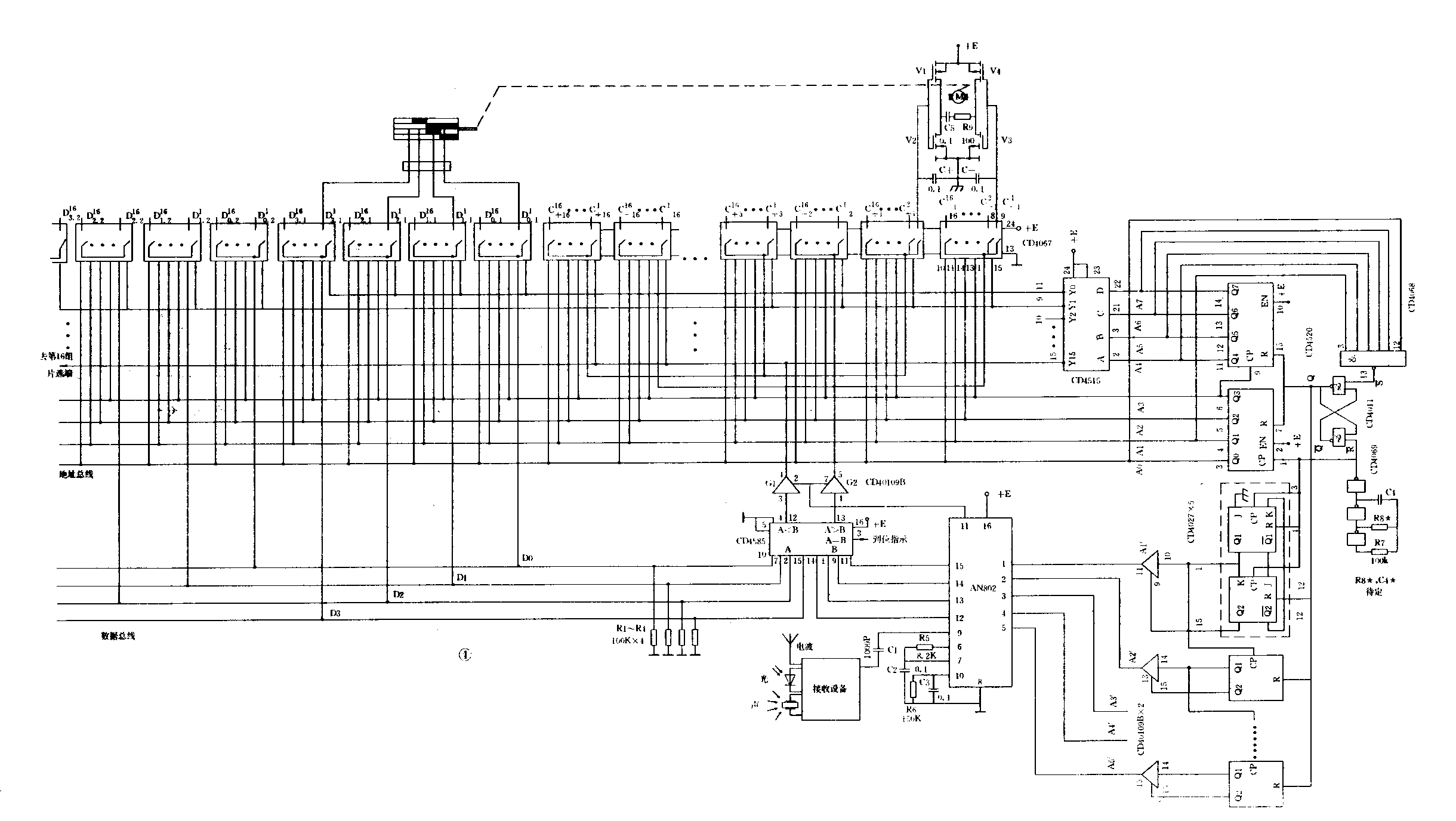
CD4067四片一组作数据回授用,2片一组作控制指令输出用,图4中的编号为D\(^{y}\)\(_{n·x}\)、Cy±·x:n、取0,1,2,3为数据位位数,共4位。x、取1~16为控制分组数,共16组。y、每组内的控制路数。±、为控制位。如D\(^{9}\)\(_{3}\).4的意义是:第四组中第9路第三位回授数据。C9+·4为:第四组中第9路“+”控制线。
当CD4520产生的地址码为A7、A6、A5、A4、A3、A2、A1、A0时,第(A7A6A5A4)BCD组多路切换器投入工作,组中每片的第(A3A2A1A0)BCD路开关接通,此时对应的D\(^{(A3A2A1A}\)0)BCD\(_{0}\)~3·(A7A6A5A4)BCD位与数据总线接通,开始向数据总线回送回授码;C(A3A2A1A0)BCD±·(A7A6A5A4)BCD的开关也接通准备向指令保持电容C\(_{±}\)充电,此时若AN802的译码正确则第11脚输出的正脉冲使三态门G1、G2有效,如果回授数据大于AN802的译出数据,则A>B=“1”、A<B=“0”,高电平通过三态门G2、CD4067的开关向指令保持电容C-充电,C+通过相应的路径放电。充放电瞬间结束,则V3、V1导通,电机反转;如果回授数据小于译出数据则A<B=“1”, A>B=“0”, V2、V4导通,电机正转。以上过程直至A=B时,A>B、A<B同时输出“0”的情况下,V1、V4导通,电机得不到电压而停止转动。A=B可做到位指示信号,如果AN802译码不正确,AN802第11脚保持“0”,三态门G1、G2处于高阻态,此时虽然CD4067相应的开关接通,但C±没有充放电回路而保持原来的存储电压,电动机维持原转动方向。这样通过地址码的不断循环,使各个伺服设备都运行到指定的位置。V1、V2、V3、V4可用集成化的步进电机专用驱动器MPM3003以缩小电路体积,其驱动电流可达5A。
关于控制稳定性问题
1.为了使控制电路不漏掉发射来的控制指令,接收机中地址码的重复频率应≥243倍的发射机中地址码的重复频率。
2.为了使伺服设备不发生左右摇摆的振铃现象,地址码的重复频率应大于Dω/4L:D:回授轴的直径,ω:回授轴最大转动角速度,L:单位回授码在轴面上占的宽度。(杨安会)