近年来,数字技术在广播级录像机获得了多方面的成功,伴随着数字集成电路降价,在家用录像机中,以数字电路来代替模拟电路也引起人们普遍的关注和期望。
数字电路处理的是数字编码信息,与模拟电路处理的模拟量不同。模拟量是利用“相似性”来代表信息的一组物理量,通常是连续变化的,它和信息关系较为直观,因此磁记录装置就是先从模拟量开始逐渐发展起来的。但是在磁记录过程中,由于磁头和磁带系统的电磁转换与信息之间很难保证完全相同。在电子线路信号处理系统中,由于半导体器件本身非线性失真和随机噪声的逐级加入,模拟电路不可避免地会产生失真和信噪比劣化,而且是随着复制次数的增加而恶化,这给VTR向高质量图像进军带来不可逾越的障碍。数字技术和模拟技术不同,它是将信息进行间隔的取样,然后以数字来表示它的大小,并用二进制数编码,只有“0”和“1”两个状态,跳出了模拟量要求“相似性”的束缚。可以根据设计要求人为地对信号进行加工,限制失真和噪声的产生。尤其是数字电路便于数码信息的存储和运算,这就为录像机实现高画质、多功能开辟了广阔的前景。虽然家用全数字录像机还处于探索和试制阶段,至今没有形成统一的格式,但是现在几乎所有家用录像机生产厂在伺服电路部分都采用了数字电路,有的公司采用数字视频场存储电路。前者使录像机伺服系统稳定可靠,后者为特技重放功能的优化及降噪电路的实现提供了新的技术基础。
一、数字伺服系统
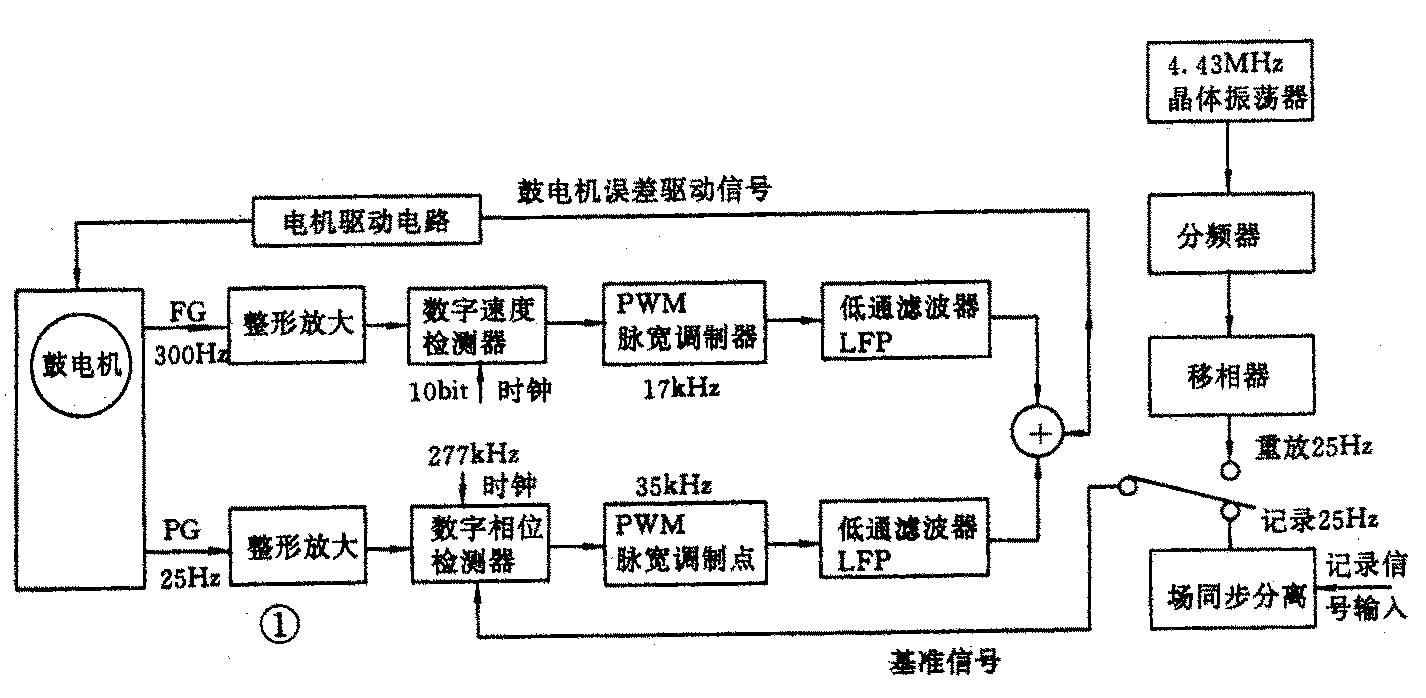
1.数字伺服环路组成和工作过程:数字伺服系统是用数字电路来实现磁鼓和主导轴的旋转速度和相位控制的,使它们的运行达到预定的精度。图1是磁鼓数字伺服环路方框图,图中标注了VT—426E实际应用数据,和模拟环路类似,环路由速度环和相位环两部分组成,产生的误差信号叠加后去控制电机的运转,所不同的是这里处理的是数字信号,组成环路的单元电路也和模拟的不一样。相位环主要由整形放大电路、数字相位检测器、数字脉冲宽度调制器、低通滤波器、时钟信号发生器(图1没有画出)及分频电路组成。速度环路在形式上和相位环相似,只是用速度检测器替换了相位检测器。它的工作过程如下:磁鼓电机在带动视频磁头旋转的同时也产生反映鼓旋转状态的速度检测信号FG(300Hz)和相位检测信号PG(25Hz),分别输至速度环和相位环路。在相位环,PG信号先被放大整形成规则的窄脉冲信号,输入数字相位检测器,相位检测器把它和基准信号进行比较后输出数字误差数据,该误差数据由脉冲(35KHz)宽度调制器将数据变成脉宽调制波,它的频率和振幅是恒定的,但脉冲宽度受二进制相位误差数据的调制。脉宽调制波通过低通滤波器滤除高频分量,输出相位直流误差电压。在速度环,与此相似,也输出一个速度直流误差电压。这两个误差电压相加,输入鼓电机驱动电路,去调整磁鼓运动的速度和相位。图1右边部分是伺服基准信号发生器,重放时,由机内4.43MHz晶体振荡器信号经过数字分频后产生25Hz基准信号,记录时,用输入的视频信号分离出场同步信号,再经二分频得25Hz基准信号。
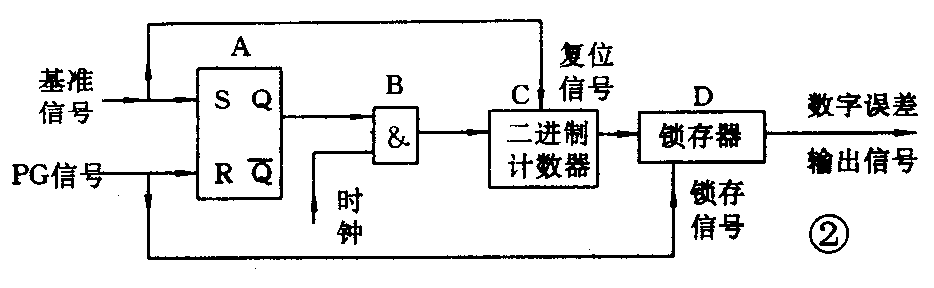
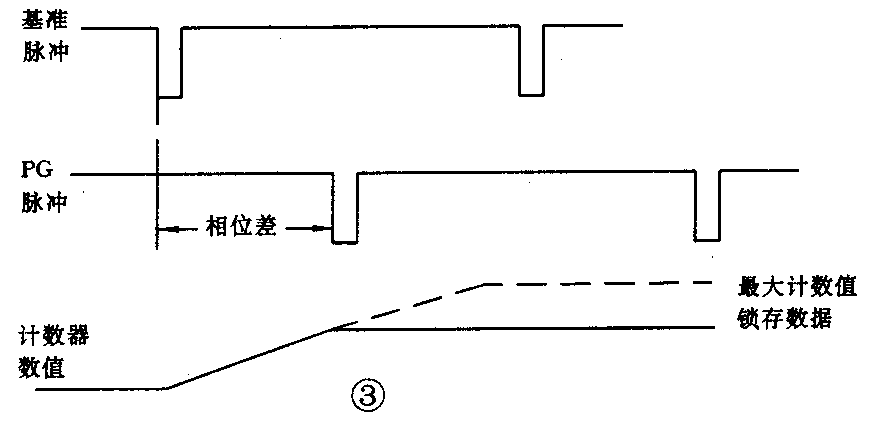
2.数字相位检测器:数字相位检测器实质上是一个二进制脉冲计数器,对基准脉冲跳变沿和对应的PG脉冲跳变沿之间的时钟脉冲(277KHz)个数进行计数,用来测量二者的时间差。图2是相位检测器原理框图。基准信号脉冲输入RS触发电路A的置位端,同时复位计数器C。A的Q端输出高电平,开启与门B,使时钟脉冲输入计数器C而开始计数。当PG脉冲信号来到时,RS触发电路复位,Q端变成低电平,封锁与门B,时钟脉冲就不能通过与门B输入计数器C。这样,计数器计下的时钟脉冲个数,就表示了基准信号和PG信号的相位差(时间差)。将该数字送入锁存器D锁存,进而送到脉宽调制器去,形成如图3波形。实用的数字相位检测器为了提高检测精度,电路组成比图2所示要复杂一些。
基准脉冲和比较脉冲之间不同的时间差对应不同的时钟脉冲个数,正确的PG脉冲相位正好处于比较器输出数字的中间值,当磁鼓旋转位置超前或滞后时,PG脉冲就提前或滞后,相位检测器的输出误差数字就比中间值(标称值)小或大,它反馈的误差数字信号使鼓电机转速变慢或变快,使PG脉冲的相位滞后或超前,它和基准脉冲的时间差就拉大或缩小,把误差输出拉回到正确的中间值。读者不难想象,相位检测电路的时钟频率越高,计数器的数字位数(比特数)就要求越多,相位检测精度就越高,伺服精度就好。VT-426E的时钟频率是277KHz,计数比特数大于10比特,因此数字伺服的误差输出是很精确的。数字伺服电路的时钟频率是由机内4.43MHz晶体振荡器信号经分频后产生,所以它的稳定性很好。
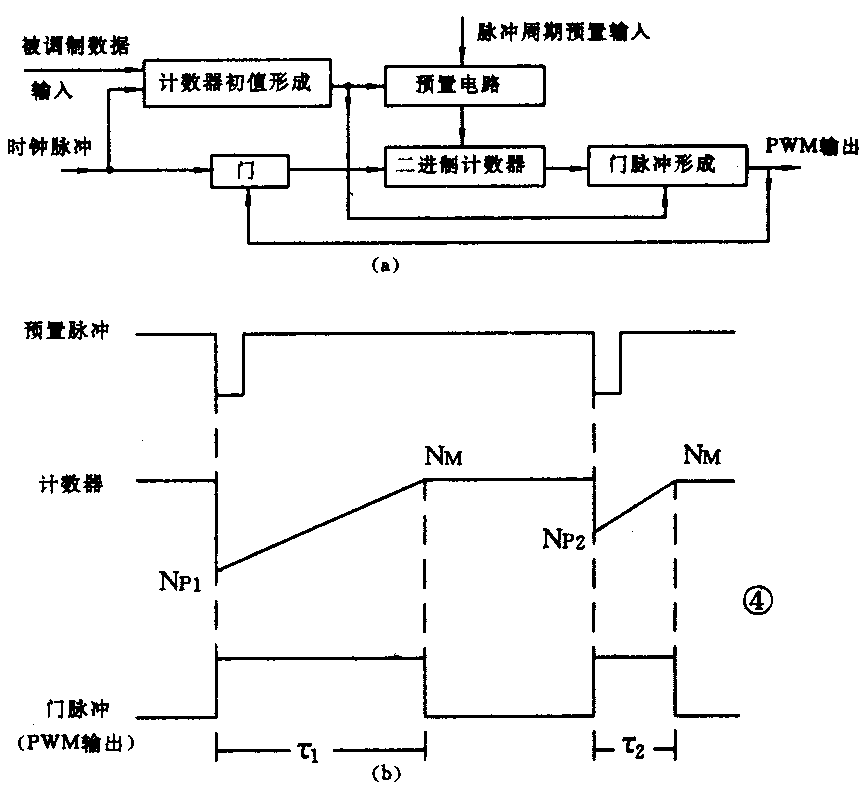
3.数字脉宽调制器:数字脉宽调制器实质上是一个D/A转换器,它将一定范围的数字误差值变换成频率和幅度固定而脉冲宽度不等的脉冲信号。一定的数值对应确定的脉冲宽度。图4(a)(b)分别是数字脉冲调制器的原理方框图和动作波形。调制脉冲的频率由输入的周期预置值决定,它不随被调制数据变化,在预置电路中产生周期恒定的预置脉冲。相位检测器的误差数据Np(被调制数据)输入计数器初值形成电路,当预置脉冲来到时,启动二进制计数器从Np1开始数时钟脉冲个数,计数器数到最大值Nm时,由门电路控制它,使计数器不再增加数值,直至下一个预置脉冲来到时,它又开始从新输入的误差数据Np2开始计数。在Np至Nm计数值计数期间,门脉冲形成电路产生一个方波,其脉冲宽度τ和(N\(_{M}\)-Np)成正比,动作波形如图4(b)所示,这便产生了所需的脉冲宽度调制波。一般以缩写PWM表示脉宽调制。
低通滤波器将伺服环路形成的PWM误差信号滤出有用的低频直流分量,变成电机驱动电路能接受的误差校正驱动电压。
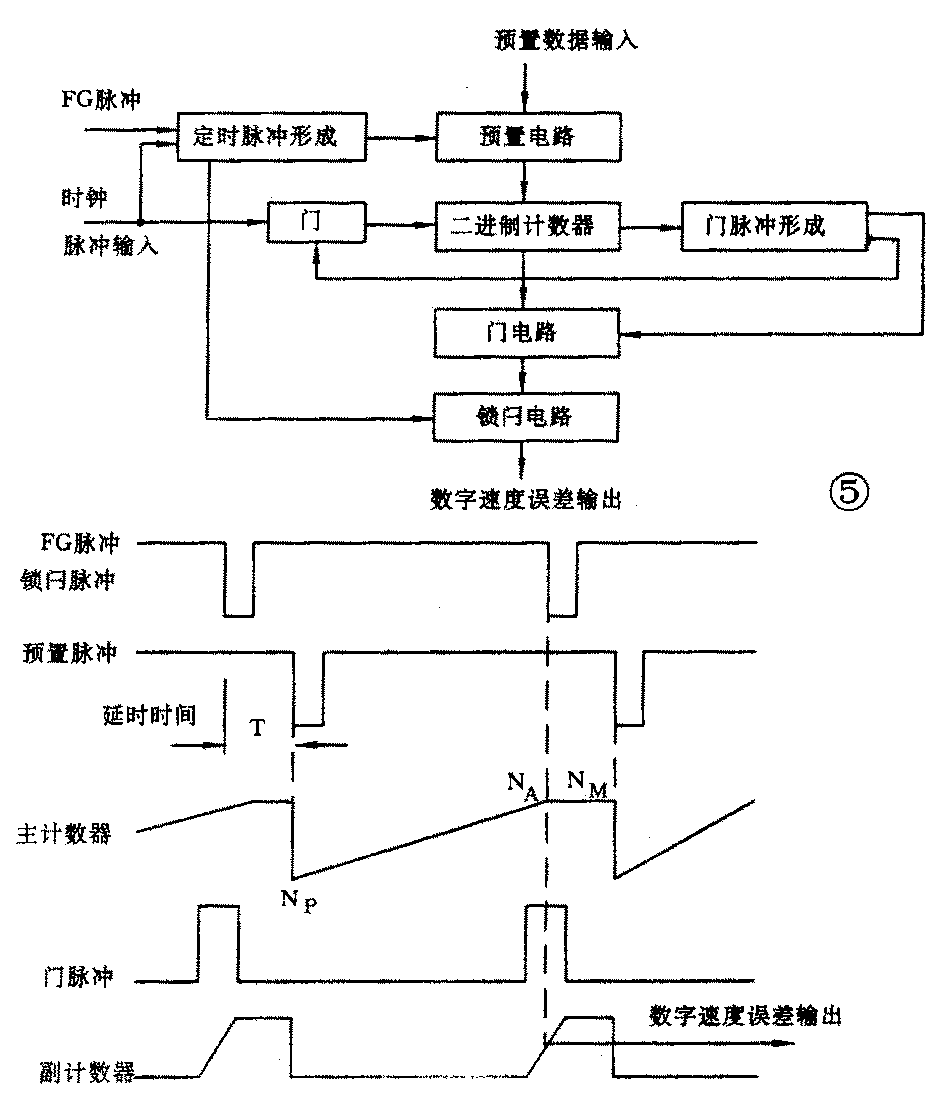
4.数字速度检测器:数字速度检测器是速度环路的核心,其原理框图如图5所示。它与数字相位检测器有很多相似之处,不过相位检测是被测信号和基准信号相比,而速度检测不存在基准输入,而是将被测速度信号FG分成二路,其中之一相对另一路延时一个固定时间,然后将二者比较测得速度误差。其工作过程如下:表征磁鼓转速的FG信号输入定时脉冲形成电路,形成宽度很窄的锁闩脉冲和预置脉冲,后者相对前者有一定量的时延T,预置脉冲将数据Np置入二进制计数器中,使主计数器以Np作为起站值开始计数,计数器数值增加直至最大值N\(_{M}\),受“门”控制停止计数。主计数器控制门电路工作在Np至N\(_{M}\)之间产生一个门脉冲,门脉冲控制另一计数器(副计数器),产生一个斜率陡峭的计数斜坡,锁闩脉冲来到的时刻对计数器瞬间数值锁闩,作为数字速度检测器的输出。上述动作过程中所提到的延时时间T,数据TP、N\(_{A}\)、NM都由预置输入端对预置电路进行预置输入。
数字伺服环路在稳定性和可靠性方面都优于模拟环路,这是因为数字环路是用高频时钟脉冲来测量被测信号的相位和速度,时钟信号是晶振信号经分频而得到的,非常稳定。二进制数字信号只有“0”或“1”二种状态,不存在模拟电路因元件随环境温度变化而引起参数变化所带来的“相似性”破坏。数字电路较模拟电路的另一优点是容易实现大规模集成电路,向小型化、低功耗方面发展。因此,目前大多数录像机都实现了数字伺服电路,将它集成在一块IC内。对于大批量录像机生产而言,可减少生产装配和调试工时,降低成本。(待续)(於志根)