YSTSⅢ型比例遥控调速器是与脉宽调制式比例遥控设备配套使用的,以实现对船模、车模的无级调速控制。本调速器选用三块通用集成块组成控制电路,特意设计了消噪电路,抗干扰性能好,安装调试方便,适合爱好者业余自制。
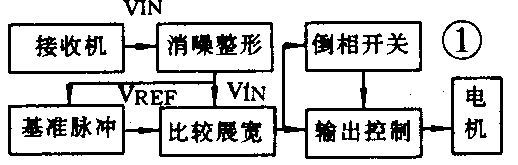
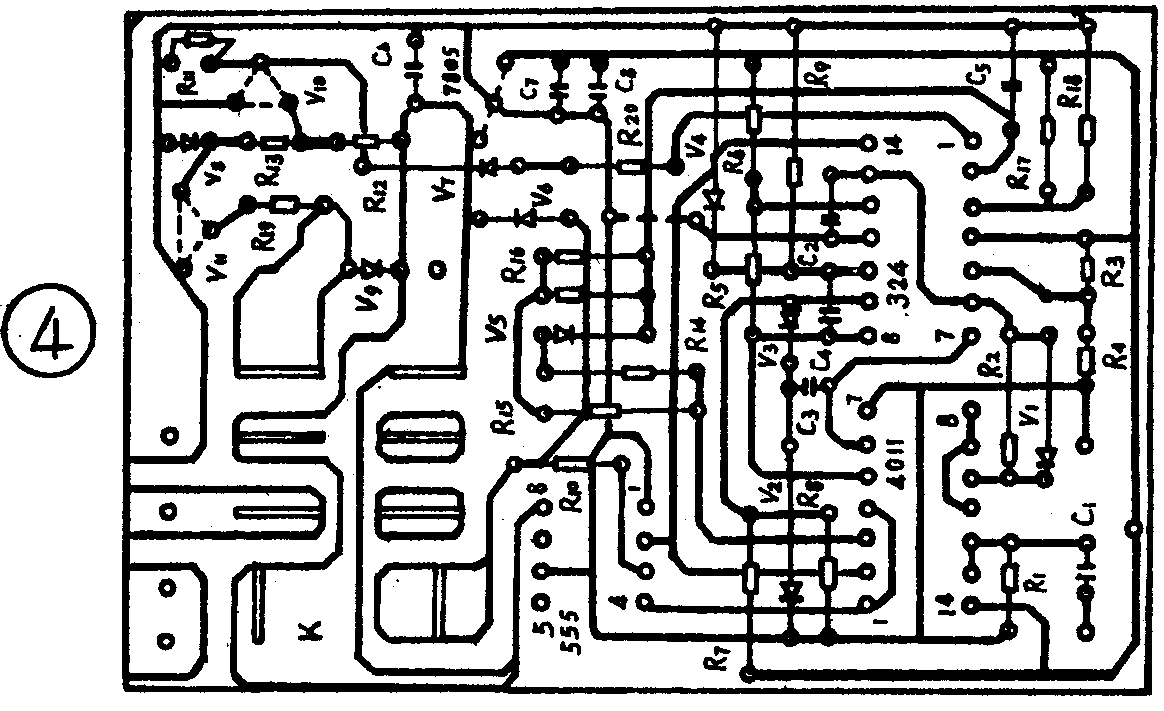
图1是本调速器的方框图。来自接收机的输入脉冲信号V\(_{IN}\)周期为20ms,随发射机操纵杆角度的变化,其脉冲宽度在1.5±0.5ms之间变化。消噪电路将VIN脉冲的脉宽压缩,变成脉宽为1.0±0.5ms的脉冲V′\(_{IN}\),脉宽小于0.5ms的干扰脉冲不能通过消噪电路。V′IN控制基准脉冲产生电路产生周期为20ms,脉宽固定为1.0ms的基准脉冲信号V\(_{REF}\),比较展宽电路输出的脉冲周期亦为20ms,脉冲宽度正比干V′IN和V\(_{REF}\)脉宽之差。倒向开关的主体是一只继电器,随V′IN脉宽小于或大于V\(_{REF}\)脉宽的变化,继电器吸合或释放。倒向开关和输出控制电路相配合,输送给电动机以极性可变、占空比可变的电流,从而达到换向、调速的目的。
N2等组成的单稳态电路产生基准脉冲。
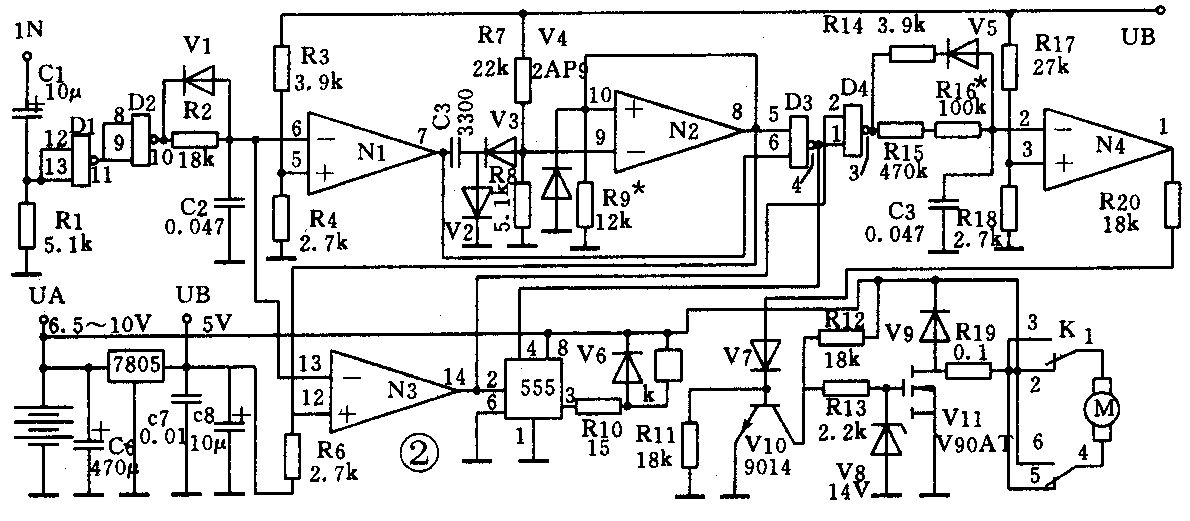
V\(_{0}\)(N1)和V0(N2)分别送到D3的两个输入端,V\(_{0}\)(N1)和V0(N2)均为高电平时,D3输出低电平,否则D3输出高电平,所以只有当V\(_{0}\)(N1)脉宽小于V0 (N2)脉宽(对应V\(_{IN}\)脉宽小于1.5ms)时,D3才有负脉冲输出,且V0(N1)脉宽越窄,V\(_{0}\)(D3)脉宽越宽,V0 (N1)脉宽最窄(对应V\(_{IN}\)脉宽最窄为1.0ms)时,V0 (D3)脉宽最宽为0.5ms。
V\(_{0}\)(N2)通过R5加到N3的同相输入端,VC2锯齿电压加到N3的反相输入端,当V0(N2)处于低电平时,N3同相输入端电压约为0.7UB,若此时VC2电平仍较高(对应V\(_{IN}\)脉宽大于1.5ms),N3就有负脉冲输出,否则N3输出维持高电平。所以V0(N3)的脉宽随V\(_{IN}\)脉宽的增大而增大,VIN脉宽最大(2.0ms)时,V\(_{0}\) (N3)的脉竟也为最大(0.5ms)。
V\(_{0}\)(D3)和V0(N3)都能通过D4门,经积分电路变成锯齿波,再经D4变成脉竟被民宽的矩形脉冲波V\(_{0}\)(N4)。V0(N4)的脉宽决定于积分电路的充放电时间常数及N4同相输入端的参考电平,V\(_{0}\)(N4)脉冲占空比最大可达100%。V0(N4)经V10放大(幅度放大),就可控制输出管V11饱和导通或截止。
倒向继电器K受集成块555(3)脚输出电平的控制。V\(_{0}\)(D3)接到555的(4)脚,当V0(D3)有输出时,555被触发变为输出低电平,K吸合,V\(_{0}\)(N3)接到555有(2)脚,当V0(N3)有输出时,555被触发为输出高电平,K释放。
先不接V11。焊接无误后首先测V\(_{0}\)(N1)(V′IN,其脉宽应能在1.0±0.5ms之间变化,若偏离太大,应查N1(5)脚电压(2V)和R2、C2值是否有误。然后测V\(_{0}\) (N2)(VREF),其脉宽约为1.0ms要求在V\(_{IN}\)脉宽最大时,V0(N2)的下降沿距V\(_{0}\)(N1)的上升沿为0.5ms,此值应调得准确些,方法是改变R9的数值。V0(N2)调准后,在做“前进”、“倒退”操纵时,V\(_{0}\)(D3)和V0(N3)脉宽变化应是对称的(从D4的输出端看)。最后调V\(_{0}\)(N4),改变R16的数值,使得在VIN脉宽最大和最小时,V\(_{0}\)(N4)脉宽占空比刚能达到100%即可。调试结束,焊上V11就可使用了。
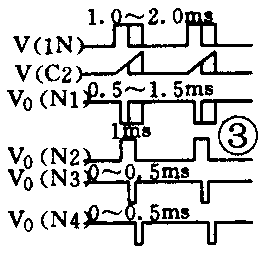
N1~N4是一块LM324,D1~D4是一块CD4011,继电器K选用JQX-13F(40Ω)型,未注型号的二极管均用4148,其余元件见图示。稳压块用7805(塑封)时,接收机和其它舵机的电源均可从本机引出。图4是本机印制板图,供制作时参考。(丘双安 胥汉平)