图示电路是一个玩具机器人控制电路,它采用了两个小型直流电动机使机器人能迂回行走。该机器人具有一定的智能功能,能判断眼前有无障碍物。当右眼前方出现障碍物时,就向左行;当左眼前方出现障碍物时,便向右行;当左右两眼前方同时出现障碍物时,机器人就回行。将该机器人用于娱乐场所,很受儿童欢迎。
电路工作原理
图中的两个电动机分别安装在机器左右两侧的下方,机器人的行走方向与每个电动机的旋转方向有关。例如,使两个电动机都朝同一方向旋转时,机器人可以前进或倒退。此外,当一个电动机正转,而另一个电动机反转时,机器人也可以原地转弯。例如,当左电动机正转(前进方向),右电动机反转(后退方向)时,机器人就向右行。
两个电动机的旋转方向是通过二只双极双投式继电器来控制的。机器人的每只眼睛均由一只红外发光二极管和一只光电三极管组成,这两只眼睛控制两只继电器工作。
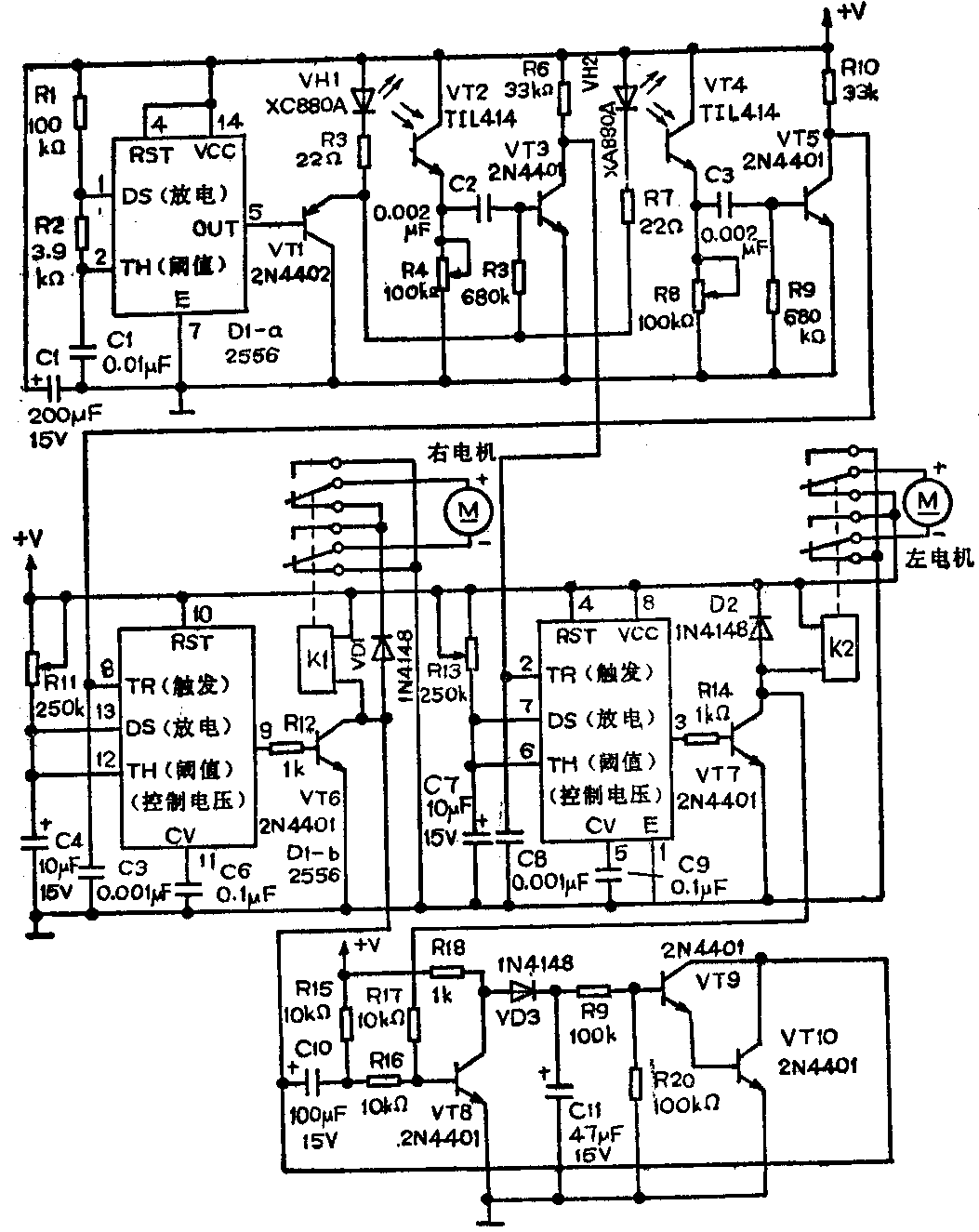
图中的556型双时基集成电路的一半(D1-a)起着一个双稳态多谐振荡器的作用,并按约1kHZ的频率很荡。D1-a的输出(5脚)驱动三极管VT1,VT1的输出(射极)又驱动红外发光二极管VH1和VH2。机器人的右眼由图中VH1和VT2组成,这两只器件应并排安装(彼此不面对),其间约离1/4英寸的距离。左眼由VH2和VT4组成,按与右眼同样方式安装,但左、右两眼间应相隔约4英寸的距离。
机器人工作时,通过两只继电器按图示电路将电源电压加至两个电动机,于是两个电动机同时正转,机器人向前行走。如果在机器人的右眼前方出现障碍物,则来自VH1的脉冲光被障碍物反射后并由光电三极管VT2检测,VT2所检测的信号经电容C2耦合加至三极管VT3的基极,经VT3放大后的信号由其集电极输出去触发D2(加至555的2脚),于是D2按单稳态方式工作,并输出2.75秒的脉冲(D2的3脚)。D2输出的脉冲经三极管VT7放大后驱动继电器K2动作,使得加至左电动机的电压的极性相反,于是左电动机反转,机器人避开障碍物向左行。利用图中556型双时基集成电路的另一半(D1-b),机器人左眼电路部分按同样方式工作。这样,机器人就可避开障碍物行走。
当机器人的左、右两眼前方同时出现障碍物时,两只继电器都动作,加至左右两电动机的电压的极性均相反,两个电动机都反转,于是机器人将倒退行走。
图中由三极管VT8~VT10及其外围元件组成的电路,可为右电动机提供更长的导通时间,避免机器人在窄通道受到阻挡。
制作与调试
该玩具机器人可根据制作者的喜好和条件制作,机械驱动部分可选用电动玩具汽车的底盘并稍加改制,同时,为减小驱动功率,机器人的身躯可选用塑料泡沫材料制作,并作适当表面处理。
该控制电路可在4.75~7.5V直流电压下正常工作。图中的R4和R8是用来调节光电三极管的灵敏度的。调节灵敏度时,可调节在离障碍物12英寸的距离起作用。R11和R13是用来控制两个电动机反转时间的长短的,电动机反转时间的长短需通过实验来确定。
图中的2N4401型和2N4402型三极管可分别用国产3DK4B型和3CK9C型管子代替。K1和K2可选用国产JRX-13F型小型小功率继电器。小型直流电动机视机器人所需驱动功率而定。直流电源可选用1号干电池。(周联3嘁耄