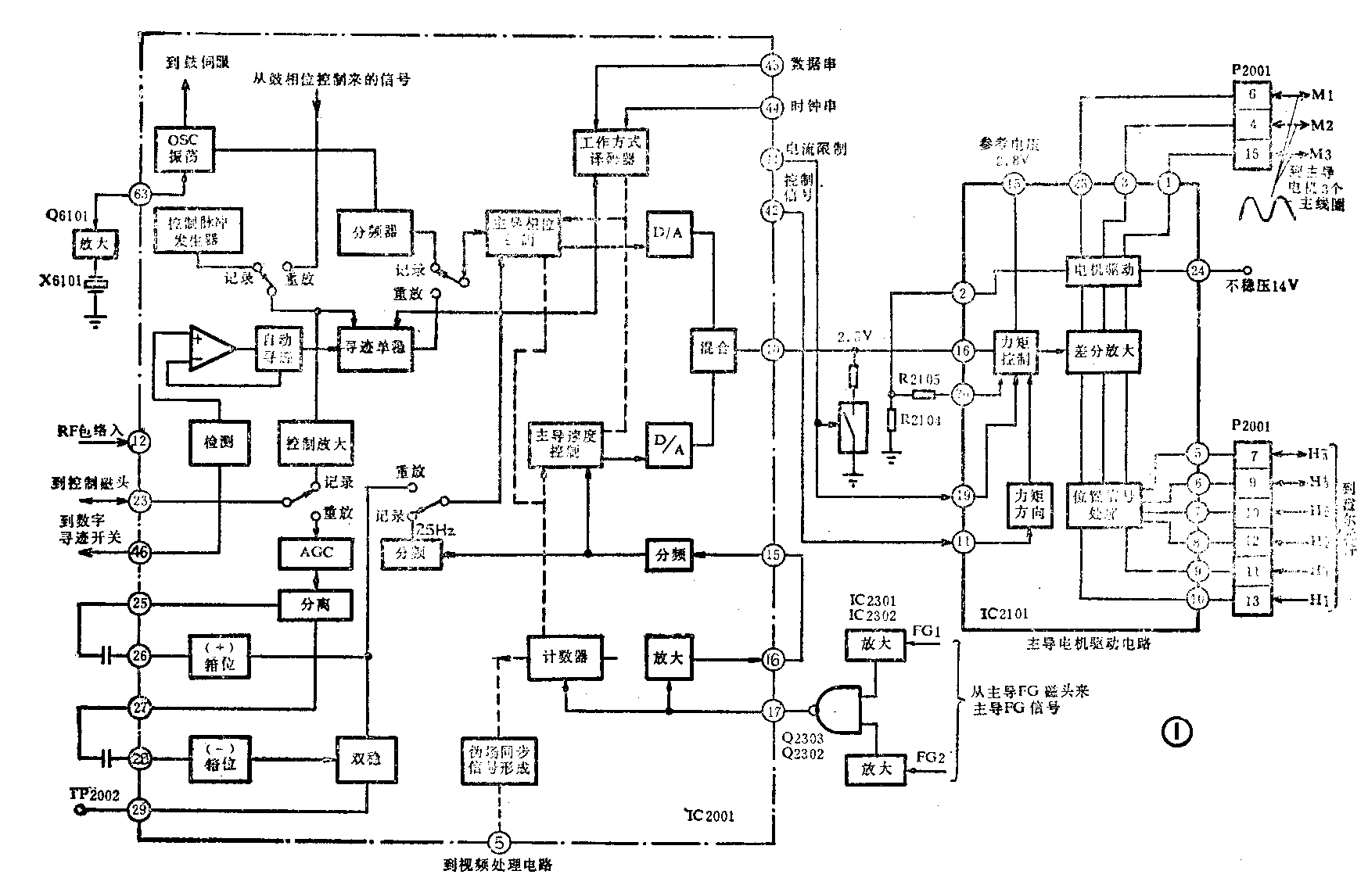
本文以NV—L15录象机主导伺服系统为例加以介绍。该机的主导伺服系统的简化方框图如图1所示。该系统中的相位控制电路和速度控制电路都是数字化的。主导伺服电路的作用是:在记录时控制磁带的走带速度,使之稳定地与磁鼓电机同步运行;在重放时控制走带速度使视频磁头能准确地跟踪已记录的视频磁迹。和鼓伺服系统一样,主导伺服系统由主导轴组件、主导驱动电路、伺服部分、主导基准信号发生器以及主导比较信号发生器等部分组成。
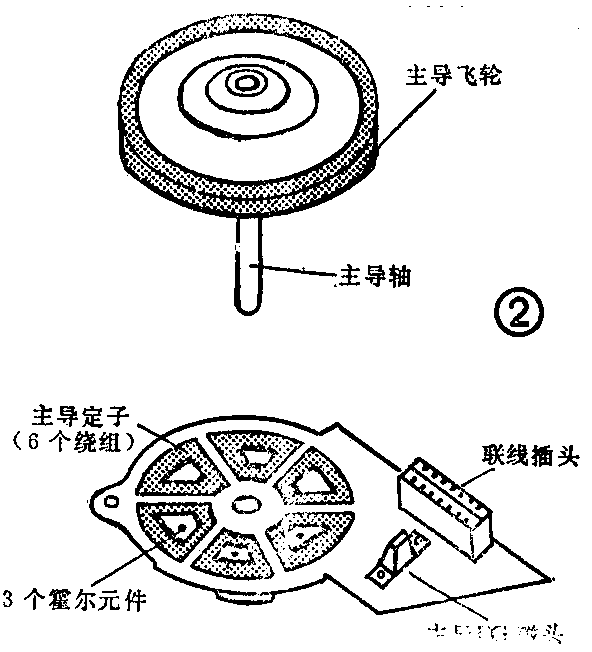
1.主导轴组件:NV—L15录象机的主导轴组件是非常重要的部件,主要结构如图2所示。它不仅承担磁带运行的任务(即带动主导轴及卷带盘转动),而且还承担鼓带的吸入和弹出以及磁带的加载和卸载的任务。主导轴组件主要由主导轴、主导转子、定子线圈和3个霍尔元件等组成。主导电机也是采用无刷直流直接驱动电机。定子线圈包括3个主线圈共6个绕组。鼓电机中流通主线圈的电流是一个方向的,而主导电机中流通主线圈的电流是两个方向的(即正转、反转)。主导转子(飞轮)的内侧面(与定子线圈相对应的一面)及外缘均匀地放置了若干对磁极。内侧面的磁极是主导电机转动所必须的,而外缘的磁极则用来产生FG信号。3个霍尔元件成120°放置在主导定子线圈附近,3个霍尔元件产生的感应电势加到IC2101(主导驱动电路)中的位置检测电路作位置检测信号开关3个主线圈的电流使3个主线圈交替工作。
如果给主导电机中的两个主线圈的4个绕组适当地供电,则其中两个绕组的线圈产生的磁场将吸引主导飞轮内侧面的磁铁,而另外两个绕组线圈产生的磁场将排斥磁铁。沿着电机旋转的方向顺序地给3个主线圈中的两个线圈通电,以便使主导飞轮保持转动。由于同时有两个主线圈的4个绕组工作,转动力距要比鼓电机大而且转动更加平稳。对主导飞轮的要求是质量大,转动相对平稳;又要求惯性小,在主导电机换向时要迅速。NV—L15录象机主导电机的飞轮比较小,惯性小,便于迅速地改变方向。在正常重放或记录方式时为了保证转动平稳,附加了一个主导刹车机构,这个刹车机构的设置不是让主导电机停转,而是在重放或记录方式时使主导电机转动更平稳。
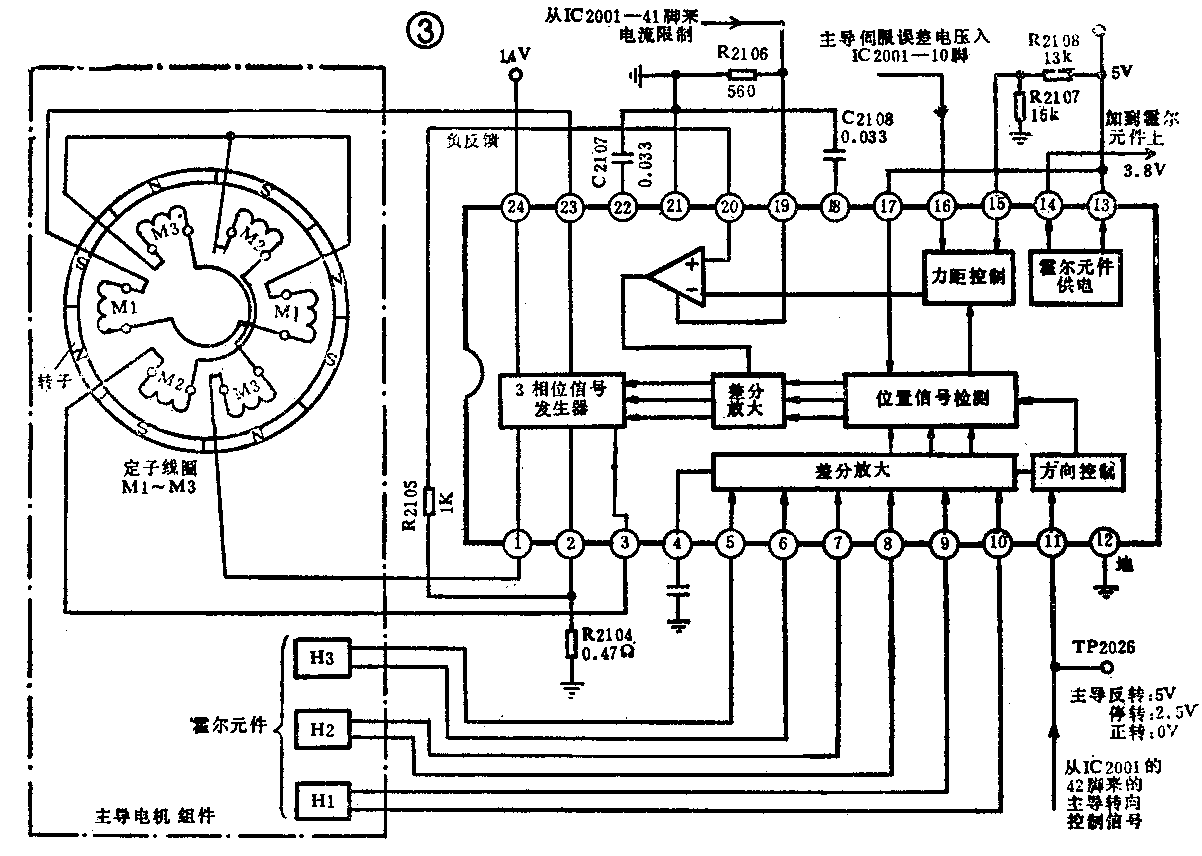
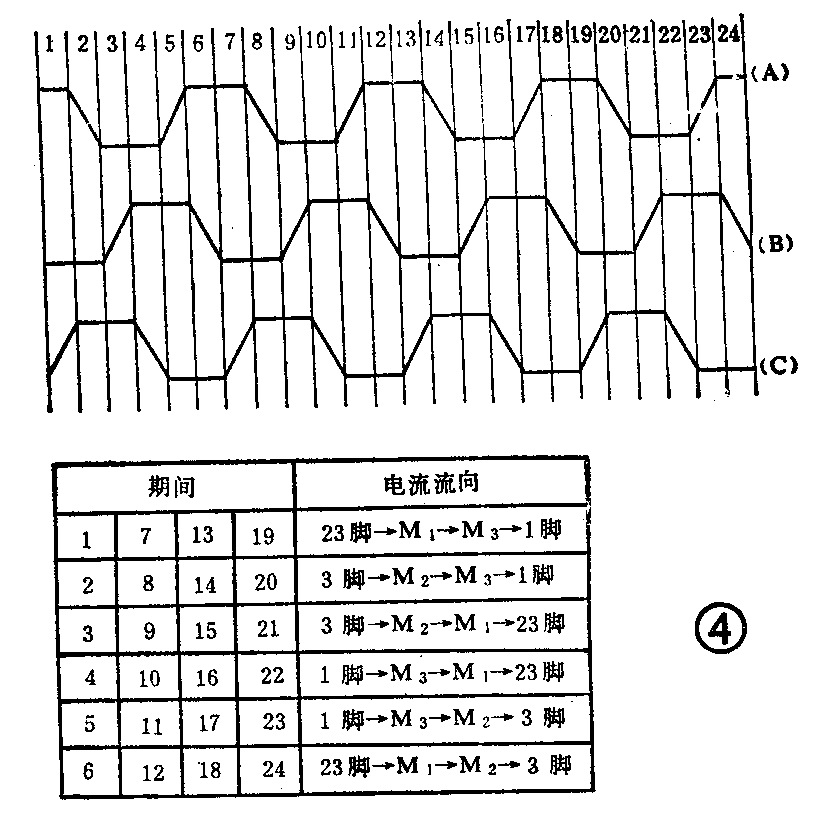
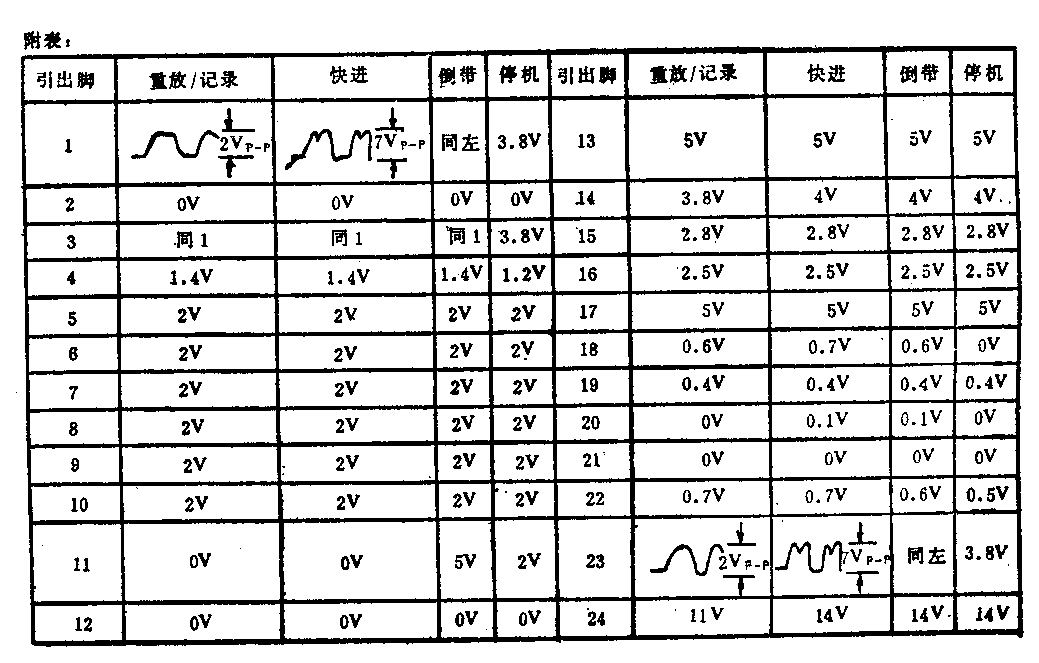
2.主导电机驱动电路:该电路由24脚集成电路IC2101(BA 6435S)组成,如图3所示,它安装在主印制电路板上。从IC2101的1、3、23脚提供的电流使主导电机的3个主线圈(M1、M2、M3)顺序地交替工作。3个霍尔元件(H1、H2、H3)拾取主导电机的飞轮转动的位置信号,经插头P\(_{2}\)001和IC2101的5~10脚加到位置信号处理电路的差分放大器。位置信号处理电路输出3个控制信号的波形(A)、(B)、(C)如图4所示。将(A)、(B)、(C)3个位置信号分成24个期间,在第1个期间波形(A)为高电位,(B)为低电位,(C)的电位从低到高,此时给主线圈M1、M3通电;在第2个期间,波形(A)的电位从低到高,波形(B)为低电位,波形(C)为高电平,此时给主线圈M2、M3通电,第3个期间又给主线圈M1、M2通电,依此类推,在某一时刻始终给两个主线圈通电,产生旋转磁场使电机转动。从IC2101的11脚送入控制主导电机正转、反转、停转的控制信号是从微处理机IC2001的42脚来的,控制信号为高电平5V时主导电机反转;控制信号为2.5V时主导电机停转;控制信号为0V时主导电机正转。从IC2001的10脚来的主导伺服电路的误差电压(正常重放时为2.5V)经过IC2101的16脚加到力距控制电路,力距控制电路的输出信号送到3个差分放大器控制其电流大小。位置信号检测电路的输出电压控制在某一时刻哪两个差分放大器工作。3个主线圈的电流都流过负反馈电阻R2104,所产生的负反馈电压经R2105和IC2101的20脚加到力距控制电路,以便使3个主线圈的电流相等。同时也起过流保护作用。R2104是易熔电阻,当由于某种原因使主线圈的电流过大时R2104熔断,从而保护了电机的线圈不至于因电流过大而损坏。IC2101(BA6435S)各脚参考电位如附表所示。
3.主导伺服的基准信号:在记录期间,主导伺服的基准信号是晶体振荡器产生的晶振信号。与IC2001的63脚相连的晶体X6101、晶体管Q6101及IC2001的内部电路组成晶体振荡器,晶振信号分频成25Hz之后加到主导相位控制电路。在重放期间为了确保主导电机与鼓电机协调一致的工作,确保CH—1磁头仅拾取磁迹1的信号,CH-2磁头仅拾取磁迹2的信号,从鼓相位控制电路来的基准信号(该信号已被晶振信号锁定)经寻迹单稳电路加到主导相位控制电路。
4.主导伺服的比较信号:从安装在主导飞轮(转子)附近的主导FG磁头拾取的主导FG信号(FG1、FG2)分别经放大电路和门电路加到IC2001的17脚。再经IC2001内部电路放大和分频变为150Hz信号,一路送到主导速度控制电路作为速度环路的自比信号,另一路加到另一分频器,变成25Hz信号再加到主导相位控制环路作为比较信号。在重放方式,从控制磁头拾取的信号作为比较信号。控制磁头拾取的控制信号经插头P4001、IC2001的23脚加到内部的自动增益控制电路,保持控制信号的幅度维持在一恒定值。然后经钳位电路以及双稳态电路形成方波脉冲信号送到主导相位控制电路作为比较信号。
5.主导伺服的流程:在记录期间,从分频器来的晶振信号以及从另一个分频器来的主导FG信号都加到主导相位控制电路。(电路为数字化的),它比较两个输入信号的相位,比较的结果产生数字的相位误差信号加到数/模变换电路,将数据信号变成相应的方波脉冲信号送到混合器中。主导数字速度控制电路是自比电路。IC2001内工作方式译码器将从IC2001的45、44脚来的数据串和时钟串信号译成伺服电路所需要的数据信号送入鼓及主导相位与速度控制电路中的只读存储器ROM之中。在主导FG信号(150Hz)的一个周期内,计数器计出时钟脉冲的个数,然后与ROM中的数相比较,从而产生了数据误差信号,该信号经数/模变换电路将数据信号变成相应的方波脉冲信号也送到混合器中。混合器输出信号为主导相位误差信号与速度误差信号之和。混合器的输出信号经IC2001的10脚加到低通滤波器,将方波信号变为相应的直流电压(约2.5V)。然后将直流误差电压加到主导驱动电路中的力距控制电路,控制主导电视的转速和相位,使之达到标称值并保持稳定。
在重放方式,主导相位控制电路的输入信号,一个是从控制磁头拾取的信号,另一个是从鼓伺服电路来的基准信号,主导相位控制电路比较两个输入信号的相位。比较的结果产生数字的相位误差信号,加到数/模变换电路,以后的工作流程与记录方式完全相同,不再重复。NV—L15录象机的寻迹电路是数字化的,从磁头放大板来的重放调频信号的包络信号,经IC2001的12脚送到内部的检测电路,检测包络信号的大小和不平度,当检测到包络信号太小或不平时,检测电路产生相应的控制电压加到自动寻迹电路,由自动寻迹电路来控制寻迹单稳的时间常数,进行自动跟踪调整,直到寻迹跟踪调到最佳位置为止。自动寻迹电路在重放期间始终监测调频包络信号的大小,必要时进行调整。
从IC2001的17脚送入的主导FG信号经计数器及其它电路形成伪场同步信号,从IC2001的5脚送出加到视频信号处理电路。
在录象机前面板有一个数字寻迹开关,当置“开”(ON)位置时由自动寻迹电路执行上述任务,当置“断”(OFF)位置时,这个开关的低电位(OV)经IC2001的46脚送到包络检测电路使自动寻迹电路停止在最佳工作点上。(葛慧英)