日本早期生产的富丽VIP-1000,以及同类产品VCP-777型放象机,在国内有相当数量。在维修中,微处理器μPD7538C损坏的情况偶有发现。由于无原品更换,致使此类故障机长期不能修复。
这种普及型单放机采用手压式带盒仓,机械结构控制电路都比较简单。这就有可能以一般的逻辑电路来模仿完成微处理器的主要控制功能,使放象机恢复工作。本文提出的采用通用小规模CMOS数字集成块装制的代用电路,就是对这一设想的实验。
应当指出,代用电路的工作原理,与原微处理器数字处理方式迥然不同。实验证明,虽然由它控制机械动作在细节上不很严格,操作方式也有所简化,但是完全可以满足一般使用要求。这对于修复和利用微处理器损坏的“死机”,具有一定的实用和借鉴意义。
电路原理
图1是VIP-1000型放象机(以下简称原机)改换代用电路后系统控制部分的有关电路。图中粗线框内即为微处理器μPD7538C的代用电路。对外围电路只需做很少的改动,如图中所示:在脚和⑦脚外分别增加R1和R2,⑧脚外增加C\(_{1}\)和R3,外增加C2;切断打“×”处的原机接线,改按虚线连接,并拆除原机电阻R503和R514。
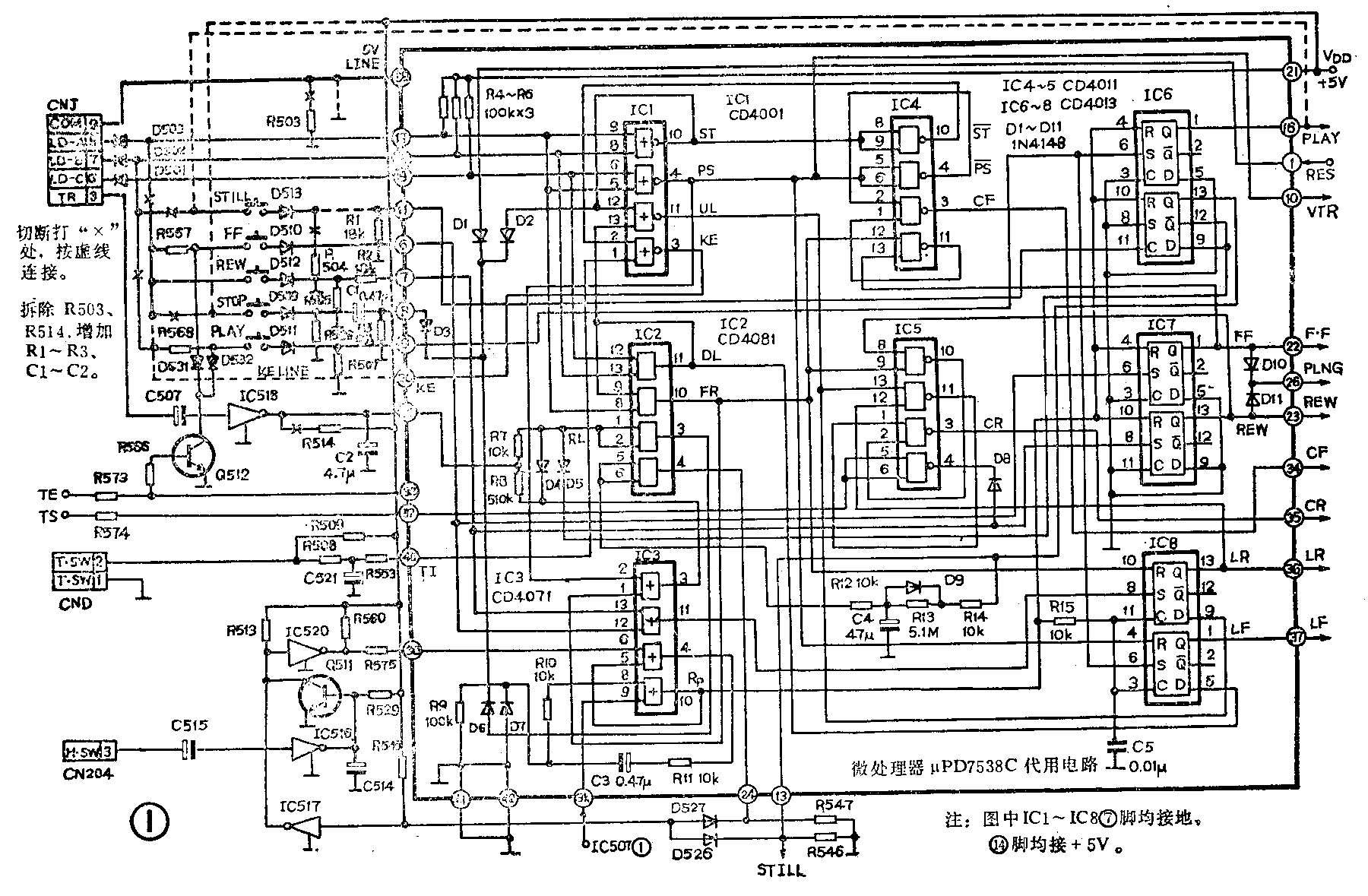
以下分别介绍各部分电路的工作原理。
1.加载位置译码电路:微处理器在发出各种控制指令之前,需要了解放象机目前的机械位置,一般由加载开关(模式选择开关)来检测。原机加载开关如图2所示,它在加载机构的拖动下到达不同的位置时,分别将A、B、C端与COM端接通或断开,从而将微处理器~输出的选通脉冲送回,以控制机械位置与工作模式相同步。如果我们设定接通为“0”,断开为“1”,即可得出图2附表所示的加载位置代码。
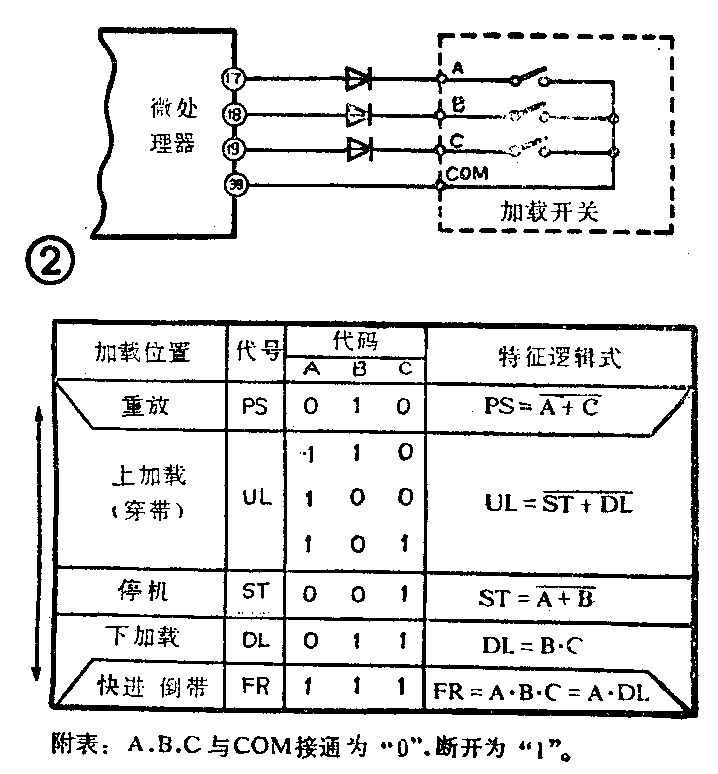
代用电路也是利用了加载开关的这种编码作用, 只是改为与原微处理器不同的译码电路,来得到加载位置信号,如图1所示。从图中可见,由于(即COM端)被改为接地,~分别由R4~R6加以正偏置,因此,当加载开关的A、B、C端与COM端在不同的加载位置下分别接通或断开时,便在~得到符合图2附表所示的正逻辑加载位置代码。这些代码由IC1中的三个或非门和IC2中的两个与门分别译出ST(停机)、PS(重放)、UL(上加载)、DL(下加载)以及FR(快进/倒带)等加载位置信号。在加载机构到达不同的位置时,相应的位置信号就由“0”变“1”。这些加载位置信号的特征逻辑式如图2中附表所列,其译码原理不再赘述。
2.操作指令输入电路:为了使代用电路尽可能地简化,将原机采用的选通脉冲键矩阵电路,改为键入允许(KE)电压输入方式。改动的方法如图1所注。从图中可见,重放键(PLAY)、快进键(FF)和倒带键(REW)的输入一侧均被改接到输出的键入允许(KE)线上。当KE为高电平时,按动上述操作键,相应的⑨、⑥、⑦脚就出现由“0”变“1”的操作指令;当KE为低电平时,由于上述操作键得不到键入电压,就被“禁止”操作。
KE电压是由停机位置信号(ST)和1输入的盒入检测信号(TI)形成的,其逻辑式为:
KE=TI+--ST……①
由①式可知:在带盒仓没有压下(盒入开关T.S.W未接通),1(TI)端为高电平;或者加载机构不在停机位置,ST为低电平时,KE电压均为低电平,即“禁止”操作输入。①式逻辑由IC4中的一个与非门(接成反相器)和IC1中的一个或非门实现,从IC1③脚输出(KE)电压,并利用原机空置的引出。
从图中还可见,停机键(STOP)被改接到+5V电源线上,在任何方式下按动此键,+5V电压经C1、R3微分后,都会在⑧脚产生一对正、负尖脉冲,作为手动停机指令。静象(暂停)键(STILL)则被改接到脚重放控制输出端,只有在重放方式下脚为高电平时,才为静象键提供键入电压。静象操作指令是利用原机空置的脚输入的。
此外,在磁带终了时,带尾检测器受光,图1中的TE端将变为高电平,这使Q512饱和导通,经D531、D532分别将快进和重放的键入电压箝为低电平,从而保证此时不能进行快进和重放操作。同样在带首时,TS端将变为高电平,经送到IC5中的一个与非门(接成反相器)变为低电平,经D8将⑦脚输入的倒带指令箝为低电平,以保证此时不能进行倒带操作。
显然,在带仓虽被压下,但仓内无盒带时,TS、TE均为高电平,上述操作均被“禁止”。
操作指令输入电路改为上述方式后,操作键不能够随机输入了,即由一种工作方式(如重放)转换到另一工作方式(如倒带)时,必须先按停机键使加载机构卸载,到达停机位置后,才允许进行另一操作。这种方式使代用电路大为简化,也能满足一般使用要求。
3.复位脉冲形成电路:这部分电路的作用是,在接到停机指令、位置信号或自保检测信号时,产生一个一定宽度的复位脉冲R\(_{p}\)。在图1中,IC3④~⑩脚的两个或门,与R11、C3、R9、R10等组成上升沿触发的单稳电路。其输入端⑥脚加入正脉冲时,输出端⑩脚便产生一个约35ms的复位脉冲Rp。IC3⑥脚的输入信号包括:
(1)接通电源时从代用电路①脚送入、经D1来的开机复位脉冲。此脉冲是由原机的Q508延迟导通形成的(参看《无线电》1990年3期11页附图)。
(2)按动停机键时,从代用电路⑧脚送入、由D3取其正的手动停机指令。
(3)加载机构卸载到达停机位置时,ST由“0”变“1”,经D2送来的停机位置信号。
(4)在重放方式下出现磁鼓停转(无磁头切换脉冲H.SW)时,IC516截止、Q511导通、IC520截止,使由“0”变“1”,送入自保指令。
(5)在静象状态超过时限(3~5分钟)时,、均变为高电平(原理后述),这使原机IC517导通、IC520截止,同样从送入停机指令。
(6)在重放或快进、倒带方式下出现卷带盘不转(无TR脉冲)时,经D6送入自保指令。其工作原理是:重放位置信号(PS)和快进、倒带位置信号(FR)分别加到IC3或门输入端①、②脚,则输出端③脚在重放或快进、倒带时就变为高电平。此高电平将经过RS(510kΩ)得外接的C2(4.7μF)充电。此时若卷带盘旋转正常,则TR脉冲使IC518间歇地导通,C2上的电位始终不能建立;若卷带盘不转,则IC518截止,C2上的电位便逐渐上升,经和R7使RL端电位也上升。经3~5秒延时后,RL端电位上升到IC2与门输入端①、②脚的开门电平,输出端③脚就由“0”变“1”,经D6送出自保停机指令。当加载机构脱离重放或快进、倒带位置后,PS和FR信号均为“0”,则IC3③脚变为“0”,C2上的电压经R7、D4向IC3迅速放电。
在静象方式下,D5将(RL)端箝为低电平,故而允许此时卷带盘停转。
除上述以外,当磁带运行至带尾或带首时,也应发出停机指令。这里利用了原机IC507产生的制动脉冲(BK)。此脉冲由IC507①脚引出,经代用电路的BK端子加到IC3⑨脚,则⑩脚输出复位脉冲R\(_{p}\)。关于BK脉冲的产生原理,请参看原机电路图,这里不再赘述。
4.控制输出电路:以上各部分电路为最终的控制输出电路提供了加载位置信号、操作指令信号和复位信号。控制电路在接到这些信号后,将产生不同工作方式所需的各种控制指令(电压),并从相应的引脚输出到外电路,从而完成模仿原微处理器主要功能的作用。这部分电路由图1中的IC4~IC8组成,下面分别介绍。
(1)重放及VTR控制:将IC6双D触发器之一接成R-S触发器,由代用电路⑨脚来的重放指令加到IC6⑥脚置位端(S),则①脚(Q)端变为“1”,此高电平从代用电路脚输出,去启动磁鼓旋转。同时,在加载机构穿带并到达重放位置时,PS信号变为高电平,经⑩脚输出VTR电压,去解除对视、音频电路的抑制。复位脉冲R\(_{p}\)加到IC6④脚置零端(R),当Rp脉冲到来时,Q端变“0”,磁鼓停转。
(2)静象及静象限时控制:IC6中另一D触发器接成双稳电路。在重放方式下,每按一下静象键,代用电路脚就送入一个正脉冲,加到IC6脚触发端(C),则脚(Q)端的状态便翻转一次。当(Q)端为“1”时,经代用电路脚输出静象控制电压,使主导电机停转,磁带停止运行。此时IC6脚(Q-)端为“0”,由D5将(RL)端箝为低电平,从而解除对卷带盘旋转的监控。同时,脚的高电平开始经R14、R13向C4充电。当C4上的电位上升并经R12达到IC2与门输入端⑤、⑥脚的开门电平时,输出端④脚由“0”变“1”,并从代用电路输出停机信号。这时和脚均为高电平,如前所述,复位电路就产生一个R\(_{p}\)脉冲。Rp脉冲加到IC6⑩脚(R)端,使脚(Q)端变“0”,从而实现对静象状态的限时控制。D9为C4提供迅速放电的通路,调整R13的阻值,可选择静象时限为3~5分钟。
(3)快进、倒带及PLNG控制:IC7中的两个D触发器均接成R-S触发器,分别完成快进和倒带控制,并分别从代用电路的和脚输出快进和倒带控制电压,使主导电机的转速得到提高。这部分控制原理与重放相同,不再重复。此外,由二极管D10、D11组成的或门,在快进或倒带时都从输出高电平,去控制螺线管(PLNG)驱动电路,使螺线管吸动,将供带、卷带盘的刹车释放。
(4)加载电机控制:IC8中的两个D触发器分别完成对加载电机的正转和反转控制。
正转(LF)控制 由代用电路⑨脚送入的重放指令加到IC8⑥脚(S)端时,①脚(Q)端变为“1”,从5输出高电平使加载电机正转穿带;加载到达重放位置时,PS信号变“1”,加到IC8④脚(R)端,使Q端变“0”,加载电机停转。复位脉冲R\(_{p}\)经R15、C5延迟后加到IC8③脚(C)端。在Rp到来时,触发器的输出状态取决于⑤脚(D)端的电位。从图1可见,D端接入的是“下加载”位置信号DL。结合图2中附表可知,在快进或倒带方式下,(DL)为“1”,这时的复位脉冲R\(_{p}\)将触发(Q)端变“1”,加载电机正转卸载;卸载到达停机位置时,DL变“0”,同时ST变“1”,由ST形成的Rp脉冲将触发Q端变“0”,加载电机停转。
反转(LR)控制 由代用电路⑥脚和⑦脚送入的快进和倒带指令分别加到IC3、脚或门输入端,则输出端脚在快进或倒带操作指令到来时变“1”,再加到IC8⑧脚(S)端,将脚(Q)端置“1”,从输出高电平使加载电机反转“下加载”;当加载到达快进/倒带位置时,FR信号变“1”,加到IC8⑩脚(R)端,将Q端置“0”,加载电机停转。同样,R\(_{p}\)脉冲延迟后加到IC8脚(C)端,而⑨脚(D)端接入的是“上加载”位置信号(UL)。从图2附表可知,在重放方式下(UL)为“1”,这时的复位脉冲Rp将触发Q端变“1”,加载电机反转卸载;卸载到达停机位置时,UL变“0”,同时ST变“1”,由ST形成的R\(_{p}\)脉冲将触发Q端变“0”,加载电机停转。
从上述分析可以看出,由于利用了D触发器的特点,得以实现对加载电机较为复杂的正、反转控制,包括不同操作时的加载方向、自保或停机时的卸载方向,以及断电后又得电的机械复位,等等,不再一一详述。需要说明的是,R\(_{p}\)脉冲经R15、C5略延迟后再作为触发信号是很必要的,它保证在Rp脉冲到来后D端的电位已经稳定,从而避免错误的触发。在调试中,如果出现卸载到达停机位置而加载电机不停转的情况,可适当增大R15的阻值。
(5)主导轴电机控制:主导电机是磁带运行的动力,它与机械加载位置有着密切的关系。因此,列出它们之间的逻辑式,就可以用比较简单的逻辑电路完成对主导电机的正转和反转控制。
正转(CF)控制 其逻辑式为:
CF=PS+FR·FF……②
=--PS·FR·FF-……③
②式中的PS、FR分别是重放位置信号和快进/倒带位置信号,FF是快进控制输出信号。从②式可知:在重放方式,加载穿带到位、PS信号变“1”时,CF就为“1”,主导电机正转开始走带;或者是快进方式、FF为“1”,并且下加载到位、FR信号变“1”时,CF就为“1”,主导电机正转开始快进。将②式变换为③式,由图1中IC4的三个与非门实现这一逻辑关系,从IC4③脚输出CF信号,经代用电路送到外电路。
反转(CR)控制 其逻辑式为:
CR=UL·LR+FR·REW…④
=--UL·LR·FR·REW-…⑤
④式中的UL、FR分别是“上加载”位置信号和快进/倒带位置信号,LR、REW分别是加载电机反转和倒带控制输出信号。从④式可知:在重放方式下,UL信号为“1”,并且加载电机反转卸载、LR也为“1”时,CR就为“1”,主导电机反转收带;或者是倒带方式、REW为“1”,并且下加载到位、FR信号变“1”时,CR就为“1”、主导电机反转开始倒带。将④式变换为⑤式,由IC5中的三个与非门实现这一逻辑关系,从ICS③脚输出CR信号,经代用电路送到外电路。
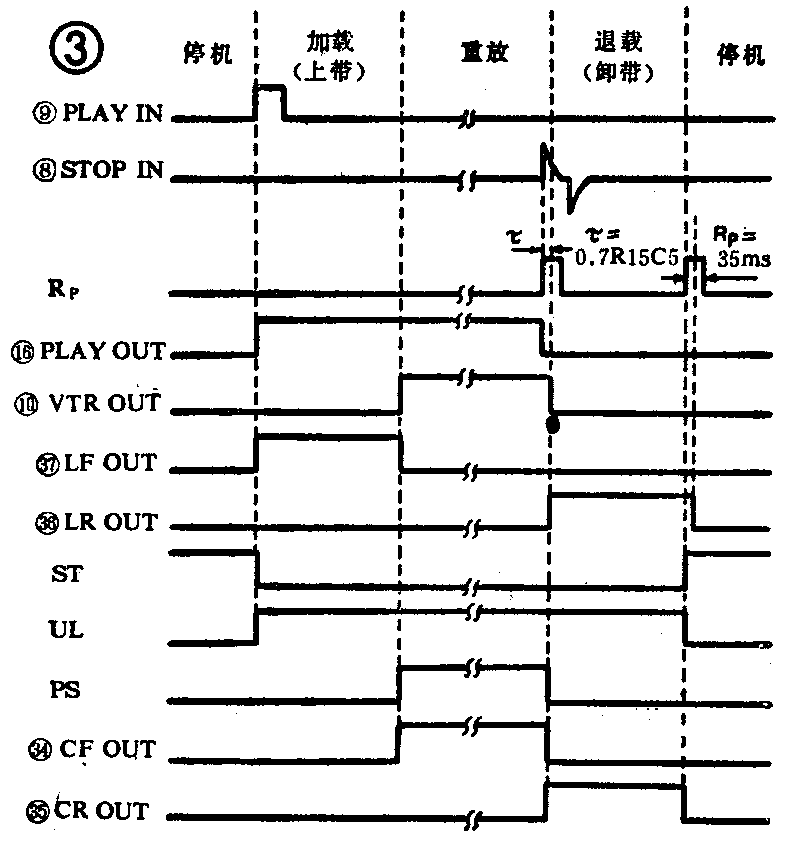
综合以上对各部分电路的分析,可以绘出在不同工作方式转换时各信号变化的波形图。图3绘出了“停机——重放——停机”时的各信号波形图,供分析电路时参考。限于篇幅,对其他工作方式不一一例举。
值得指出的是,由代用电路控制的机械动作在某些细节上是不够严格的。例如:快进或倒带操作时,原微处理器控制加载机构到达FR位置后,延迟0.2秒才启动主导电机转动;又如:重放状态下按停机键时,原微处理器控制加载机构卸载到达ST位置后,也延迟0.2秒才令主导电机停转。为了简化电路,本文介绍的代用电路省略了这些细节上的控制。经多台实用证明,这一简略并未影响整机的机械和电路的同步工作,作用效果良好。
装制方法
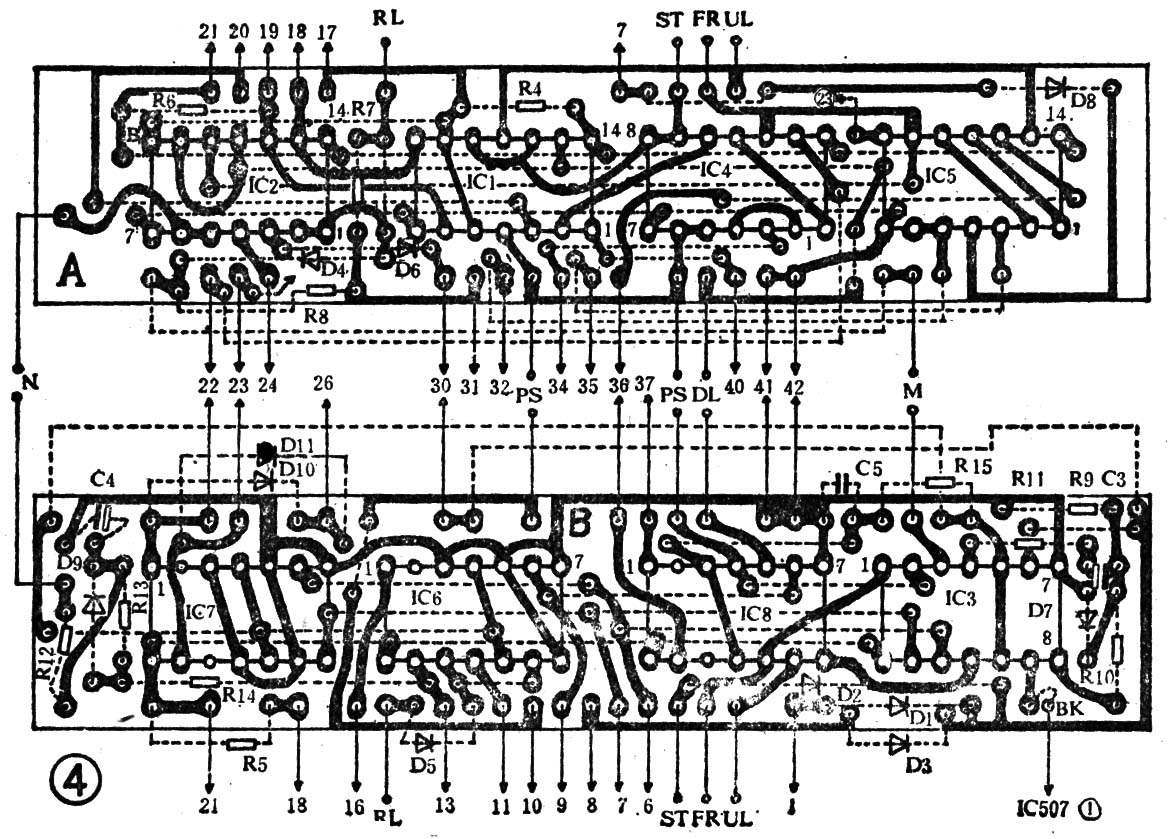
图1粗线框内的代用电路分装在图4所示的A、B两块印制板上。受到安装空间的限制,印制板的面积较小,元件布局较密,因而制作一定要精细,焊接一定要可靠。装好的A、B两块板,照图4标注的编号,用硬裸线在元件一面焊出引脚,注意引脚不要与元件相碰,必要时可对引线加上塑料套管。在原微处理器IC501的位置上,将A板插入对应的焊孔并焊好;B板则直接焊在印制电路面的对应引脚的焊盘上。图4标注的字母代号表示A、B两板之间需要连接的端点,用细塑导线穿过空置不用的焊孔将A、B两板对应的端点焊接起来。
对外围电路的改动,应按图1所示进行,并反复核对。确保无误。原机操作控制电路板有许多跳接线,利用这些跳接线来改变接线点和增加元件是很方便的。
全部改装完成后,即可通电试用。按照图1所示的元件数值,一般不需调整即可正常工作,只是由于CMOS电路的门限电压不一致,可能会使卷带盘检测延时(3~5秒)或静象限时(3~5分)有所偏差。如偏离过大,可适当改变R8(510Ω)或R13(5.1MΩ)的数值。
文后说明:《无线电》1990年第3期登载了“1000型放象机加载过流保护电路的检修”一文后,笔者收到一些读者来信,询问有关该机微处理器μPD7538C的购买及代换等问题。应当指出,在实际检修中微处理器损坏的情况并不常见,应对其外围电路做全面的检查后才能确认。由于1000/777型机系早期产品,国内拥有量较大。一旦微处理器损坏,难以购到同型号产品。本文介绍的代用电路为这类故障机提供了一个简易可行的修复和利用的方法,并借此兼答读者,恕不一一复信。(云南开远五交化站 于文涛)