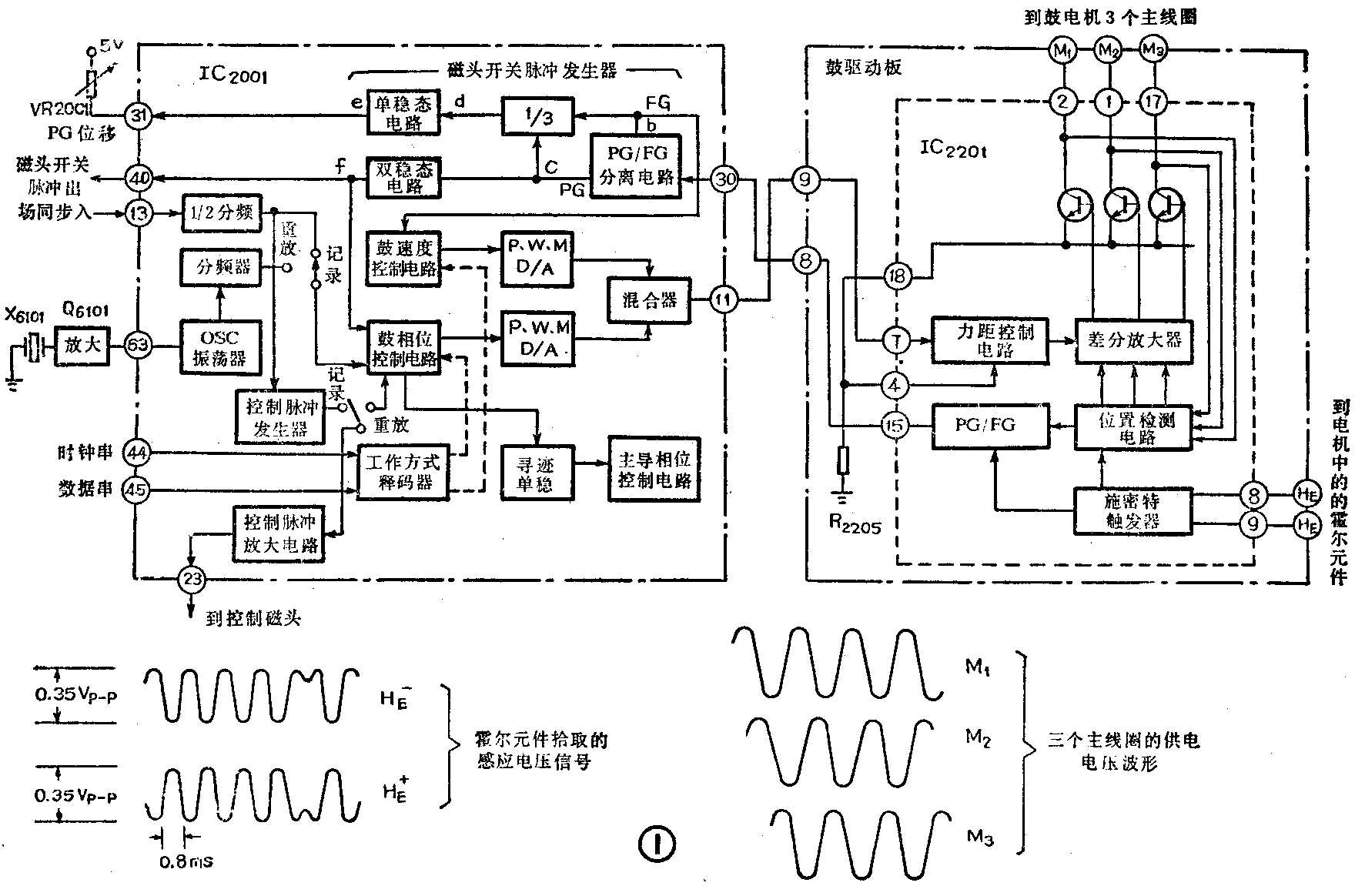
本文以NV-L15型录象机的鼓伺服系统为例加以介绍。该机的鼓伺服系统的简化方框图如图1所示。这部分电路中的相位控制环路和速度控制环路都是数字化的。鼓伺服系统的作用是在记录期间使磁头鼓的转速与视频信号中的场同步信号锁定;在重放时,使视频磁头准确地跟踪磁带上的视频磁迹,并与晶体振荡器产生的晶振脉冲信号锁定。鼓伺服系统、主导伺服系统以及系统控制部分的微处理机被集成在一块76脚的集成电路内(IC2001)。NV-L15录象机的鼓伺服系统主要由磁鼓组件、鼓驱动电路、鼓伺服电路、鼓的基准信号发生器以及鼓的比较信号发生器等组成。
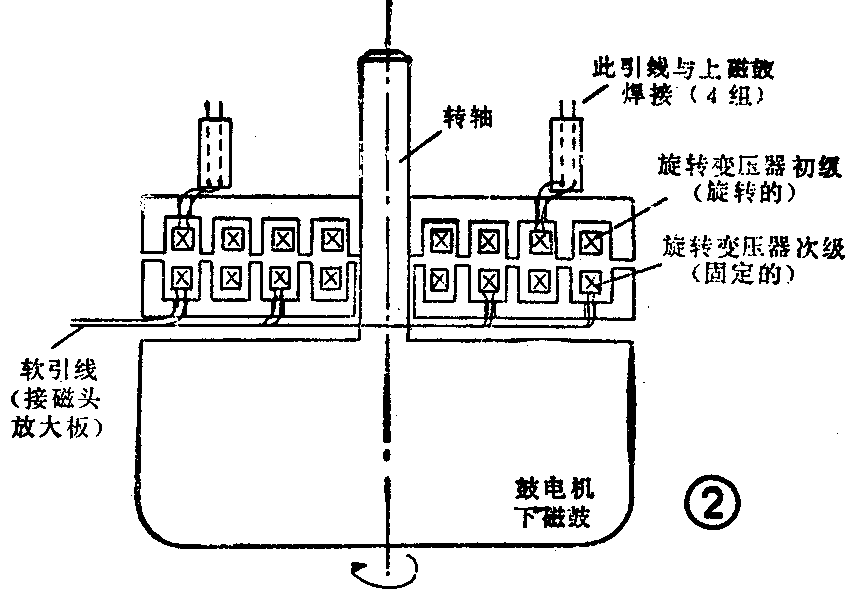
1. 磁鼓组件:NV-L15录象机的磁鼓件由鼓电机、上磁鼓、4个视频磁头以及旋转变压器等组成,它是录象机中非常重要的部件。旋转变压器的初级与视频磁头的线圈相连接,并与鼓电机的转轴一齐旋转;旋转变压器的次级不旋转,由软引线从磁鼓组件引出,通过插头P002与磁头放大电路相接。旋转变压器的初、次级线圈安装在罐形磁芯内,罐形磁芯分上、下两部分,上、下两部分磁芯分别有4个沟槽,沟槽内安装初、次级线圈,每组线圈有3~4匝,如图2所示。在记录时,从磁头放大电路板来的调频信号,经插头P002送到旋转变压器的次级,通过磁通交连,旋转变压器的初级得到被记录调频信号的信息,并送到视频磁头记录在磁带上。在重放时视频磁头从磁带上拾取的信号经旋转变压器的初级、次级以及插头P002送到磁头放大板。
上磁鼓上安装有4个视频磁头,其中一对磁头用于标准速度重放或记录,磁头宽度为49μm,另外一对磁头用于慢速记录或重放,磁头宽度为35μm,两对磁头安装位置相距620μm。哪一对磁头工作由系统控制电路中的微处理机控制。正常重放(SP)的速度为23.39mm/s;慢速重放(LP)的速度为11.695mm/s,同样使用240分钟的磁带以SP方式工作可以记录/重放4小时的节目,而以LP方式工作可以记录/重放8小时的节目。
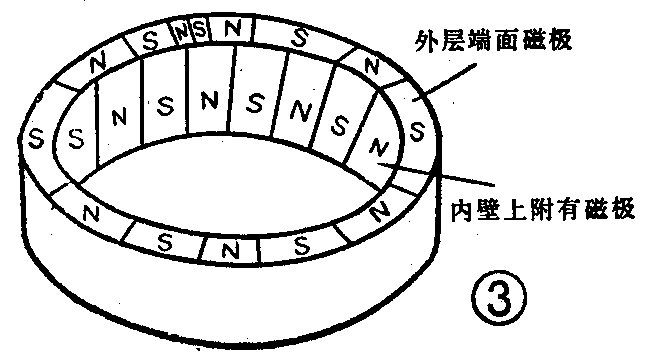
鼓电机是直接驱动的无刷直流电机,这种电机准确度高、体积小、寿命长。鼓电机主要由鼓转子、定子线圈、转轴以及一个霍尔元件组成。鼓转子内壁和端面均匀地分布着6对磁铁,在转子的端面除了6对磁铁之外还多设了一对小磁铁,如图3所示。定子线圈由3个主线圈组成。3个主线圈有9个绕组(每个主线圈有3个绕组),3个主线圈交替工作。霍尔元件用来检测鼓转子(环状磁铁)的位置和鼓的转速和相位,所拾取的信号送到鼓驱动电路。从鼓驱动电路IC2201的1、2、17脚顺序地给每个主线圈提供电流,线圈通电后产生磁场,与鼓转子内壁的6对磁铁的磁场发生作用,同性相斥而异性相吸,使鼓转子开始转动。当转动了120°角时,第2个主线圈通电,产生磁场使鼓转子继续转动,然后是第3个主线圈通电…,这样鼓电机就转动起来。随着鼓转子的转动,霍尔元件拾取到由于鼓电机转动而产生的感应电压的波形如图1中波形所示。
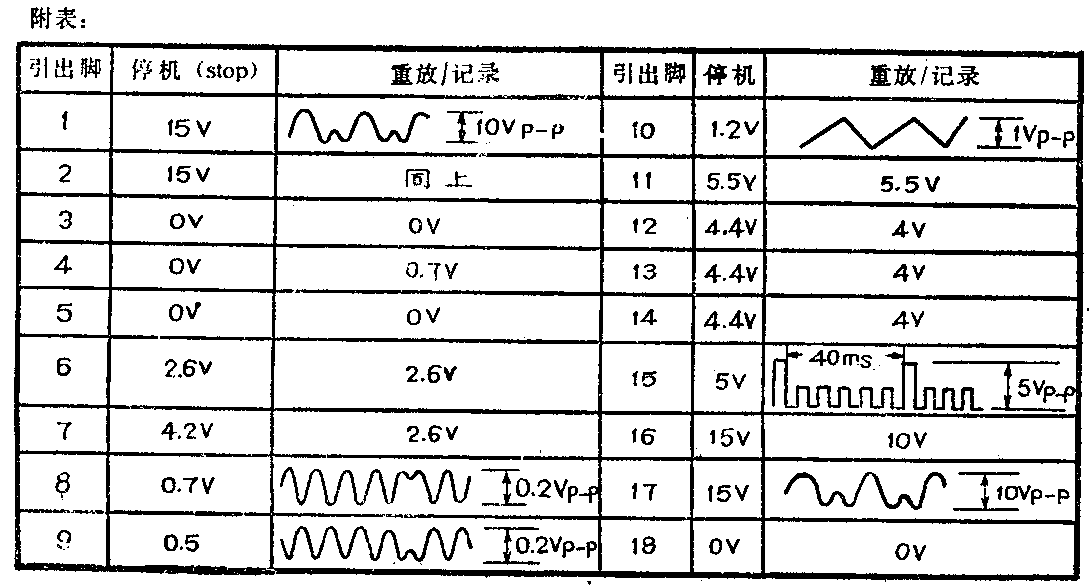
2.鼓驱动电路:该电路为18脚集成电路IC2201(AN3814K)。驱动电路通过插头P2201与鼓电机连接。霍尔元件产生的感应电压经IC2201的8、9脚送到IC2201内部的施密特触发器进行整形、放大,然后从IC2201的15脚送出鼓FG信号和鼓PG信号到鼓伺服电路。施密特触发器的输出信号送到位置检测电路,形成位置控制信号加到差分放大器电路,从而控制3个差分放大器电路交替工作。3个差分放大器又带动3个驱动晶体管工作,3个驱动晶体管的电流经IC2201的1、2、17脚流经3个主线圈。从鼓伺服电路来的误差电压经鼓驱动板的9脚和IC2201的7脚送到力距控制电路。力距控制电路可以控制3个差分放大器的电流大小,从而也控制了流经3个主线圈电流的强弱,主线圈电流大了电机转动速度快,反之电机转速慢。当IC2201的7脚电位变低时,力距控制电路会使驱动晶体管的电流增大。主线圈的电流经IC2201的18脚流经一个负反馈电阻 R2205,使反馈电压加到力距控制电路,从而使3个主线圈的电流相等,确保电机转动平稳。集成电路IC2201的5V工作电压从它的11脚送入,鼓电机的供电电压12V从IC2201的16脚送入。鼓驱动集成电路各引出脚对地电压及波形如附表所示。
3.鼓的基准信号:在记录期间,鼓的相位环路的基准信号,是从IC2001的13脚输入的从被记录的视频信号中分离出来的50Hz场同步脉冲信号。该信号经1/2分频之后送到鼓数字相位控制电路。在重放期间,鼓的相位环路的基准信号是晶体振荡器产生的晶振信号,该信号由与IC2001的63脚相接的晶体X6101、晶体管Q6101以及IC2001的内部电路组成的晶体振荡器产生。晶振信号经内部分频电路变为25Hz的脉冲信号加到相位控制电路。
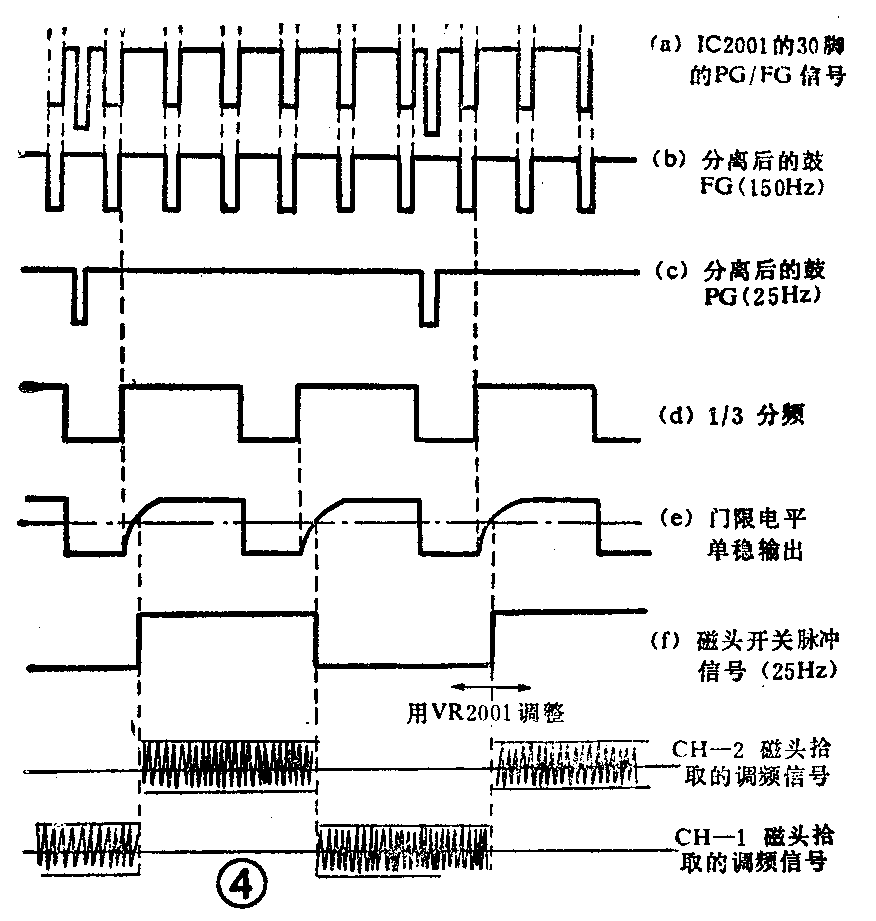
4.鼓的比较信号:从IC2001的30脚送来的鼓PG/FG信号加到磁头开关脉冲发生器电路,如图1所示。经PG/FG分离电路产生鼓FG信号和鼓PG信号。鼓FG信号分两路,一路加到鼓数字速度控制电路作为自比信号。另一路加到1/3分频电路,鼓FG信号的频率为150Hz,经1/3分频电路变成50Hz。PG/FG分离电路产生的鼓PG信号作为复位脉冲也加到1/3分频电路和双稳态电路。当PG脉冲到来时确保1/3分频器和双稳电路的输出为低电位。50Hz的信号送到单稳态电路,该电路的时间常数由电位器VR2001来调节。用来调节如图4所示的门限电平的高低,即改变磁头开关脉冲上升或下降沿的位置。当重放图象的底部出现噪声带或重放图象出现场跳时,可以调节VR2001(PG位移)来消除磁头开关噪声。单稳态电路的输出信号加到双稳态电路。当单稳态电路的输出脉冲超过双稳电路的门限电平时,双稳态电路工作或复位。这样就得到了频率为25Hz的对称的磁头开关脉冲。图4示出了这部分电路的相应波形以及磁头开关脉冲与视频磁头记录/重放信号的关系。每当PG脉冲到来时,磁头开关脉冲为负极性,CH-1磁头工作,而CH-2通道被关断;而在磁头开关脉冲的正极性期间,CH-2磁头工作,CH-1被关断。确保两个视频磁头正确地交替工作。磁头开关脉冲在记录和重放方式都作为鼓相位环路的比较信号。磁头开关脉冲还从IC2001的40脚送出加到磁头放大板。PG脉冲信号与磁头开关脉冲之间的关系非常重要,这个正确的关系是由录象机的机械安装位置来保证的。在修理录象机中如遇到需要拆下磁鼓时,在拆卸之前一定作标志,记住原来的安装位置。重新安装时一定要确保下磁鼓的安装位置保持原来的位置,否则会因磁头开关脉冲与视频磁头的工作关系不正确使重放视频信号在场同步期间有失落现象,造成重放图象场抖动及场不同步。
5.鼓伺服的流程:在记录期间,从IC2001的13脚送来将要记录的视频信号中的场同步信号(50Hz),经1/2分频变为25Hz。然后分两路,一路送到鼓相位控制电路作为参考信号;另一路送到控制脉冲发生器,产生的控制脉冲信号经录/放开关及记录控制脉冲放大电路,再经IC2001的23脚和插头P4001的6脚送到控制磁头,将控制信号记录到磁带上。鼓相位控制电路的另一个输入信号是从磁头开关脉冲发生器产生的25Hz的对称方波。数字鼓相位控制电路比较两个输入信号的相位,产生的误差数据信号经数/模变换电路变成方波脉冲信号,再将这个信号加到混合器电路与速度环路产生的速度误差信号混合。混合器的输出为对称的方波脉冲信号时,说明伺服电路的工作正常而且鼓的转速和相位都符合要求。混合器的输出信号从IC2001的11脚送出,此时该点的直流电位为2.5V。经低通滤波器将伺服电路的输出误差电压送到鼓电机驱动电路。当电机的转速变快时IC2001的11脚的直流电位变高(高于2.5V),鼓驱动电路使电机转速变慢从而保证了鼓电机转速保持不变,达到伺服的目的。在重放方式,鼓伺服电路的工作过程基本上与记录方式相同,所不同的是鼓相位控制电路的参考信号是晶体振荡器产生的晶振信号,经分频后为25Hz的脉冲信号加到鼓相位控制电路。(葛慧英)