(2)相位和速度伺服电路:速度环路是电机转速的粗调电路,使电机转速稳定;相位环路的作用是电机转速的细调,使电机转动的相位与基准信号一致。一般相位环路是将比较信号与基准信号相比较;速度环路是将从电机取样的FG信号自比。两个环路产生的误差电压之和通过驱动电路去控制电机转动的速度和相位。伺服电路又有记录和重放两种工作状态。由机械控制电路中的微处理机来控制。伺服电路中有一部分电路在记录和重放方式是公用的,由一些电子开关进行工作方式的转换。有时为了兼顾记录与重放方式的不同要求,附加了一些校正电路以得到最佳的伺服效果。
在众多的家用录象机及单放机中,有两种不同型式的伺服电路,一种是逻辑伺服,另一种是数字伺服。逻辑伺服电路中将从测速装置来的FG脉冲或PG脉冲信号变为取样脉冲;将基准信号变为梯形波信号,这两种脉冲信号都送到取样与保持电路,产生的误差电压由一个大容量的电容器来保持。这种伺服电路伺服速度慢、稳定性能差、受温度影响大。数字伺服是借助于在电机转动的某个期间内计数时钟脉冲的数目来检测电机的旋转误差。由一些计数器和门电路构成,稳定性好,跟踪快,受环境温度影响小。这两种伺服电路的功能是一样的,但手段不同,维修方法也不同。所以在修理录象机时应注意区分这两种不同型式的电路。
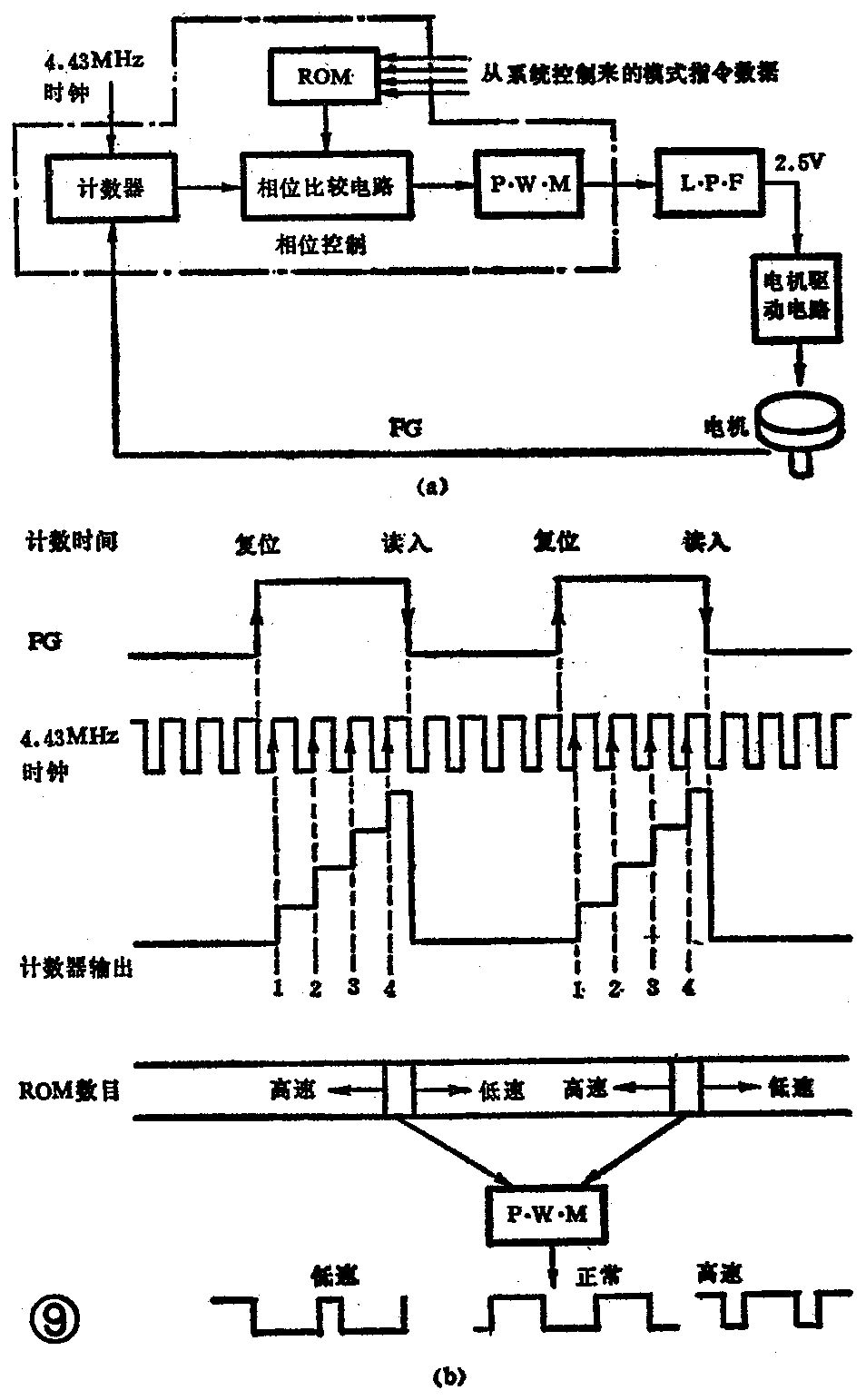
①数字速度伺服电路的基本原理:图9(a)示出了用于速度控制的数字伺服的简化方框图。由晶体振荡器产生的4.43MHz的晶振信号作为标准的时钟信号加到计数器中,从系统控制电路来的工作方式指令数据被读到只读存储器ROM之中。代表电机转速的FG信号加到计数器电路。在FG脉冲信号的一个周期内计数器计时钟脉冲的个数,并将所计的数据与ROM中的数据相比较。比较的结果产生的误差数据信号通过脉冲宽度调制器(PWM)将数据信号变为脉冲信号。再经低通滤波器将脉冲信号变为相应的直流误差电压(约2.5V)加到电机驱动电路,用来校正电机的转速误差。图9(b)示出了速度控制的示意波形图。计数器在FG脉冲的上升沿开始计数时钟脉冲的个数,到FG脉冲的下降沿为止。如果计数器所计的数目(假设是4)与ROM中的数相同,那么脉冲宽度调制器输出对称的方波脉冲,即脉冲的空度比为50%,转速误差为零,说明电机转速是正确的。低通滤波器输出电压为2.5V。如果计数器所计的数目比ROM中的数少,说明电机转速高了,此时PWM电路输出的脉冲的正极性部分比负极性部分宽,因而低通滤波器的输出电压增高(>2.5V),通过驱动电路使电机转速变慢。当计数器所计的数目比ROM中的数目多时情况正好相反,从而实现了对电机转速的控制。这种速度控制电路也叫速度自比电路。
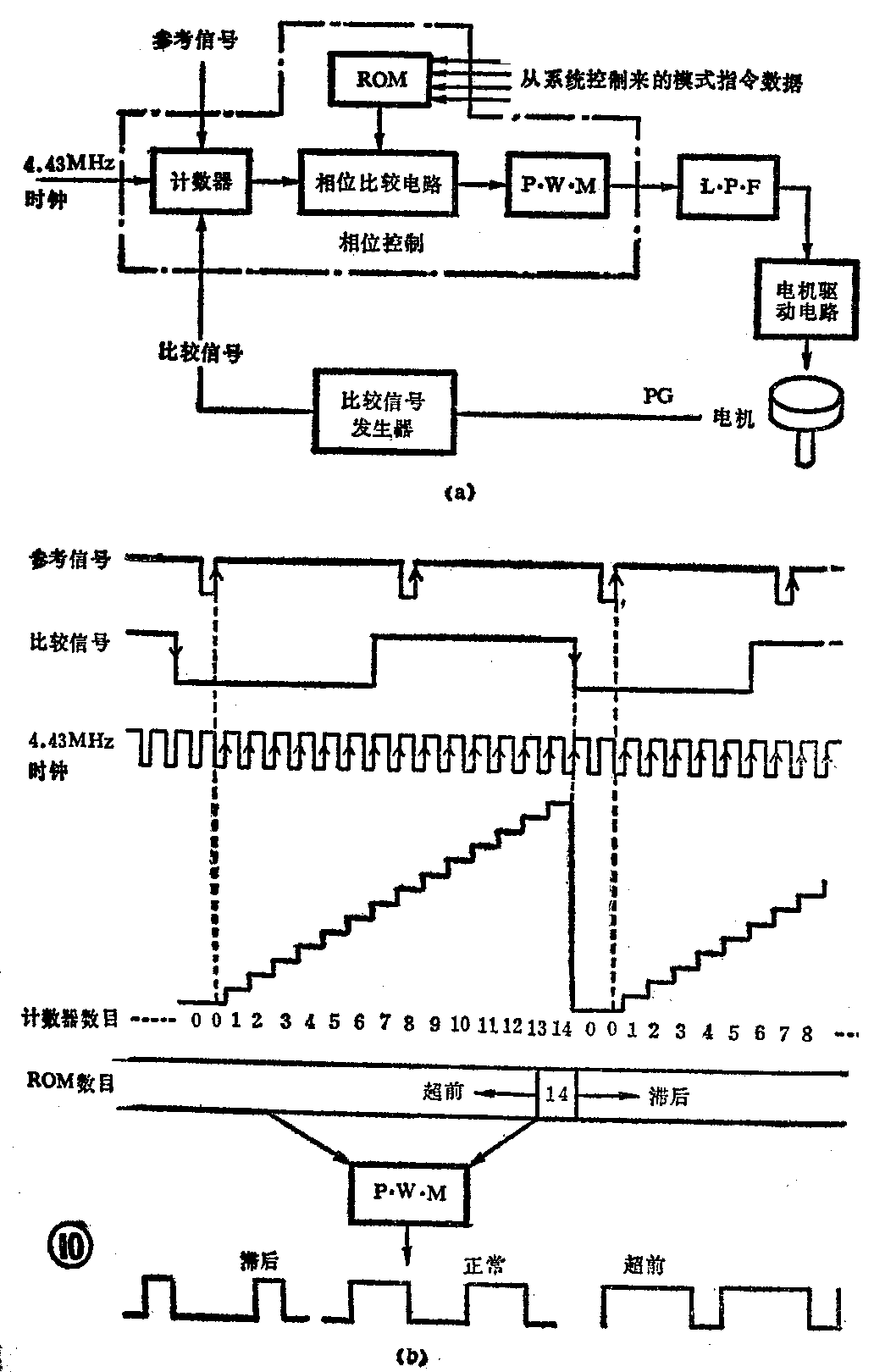
②数字相位伺服电路的基本原理:图10(a)示出了用于相位控制的数字伺服电路的简化方框图。4.43MHz晶振信号做为时钟脉冲加到计数器中,从系统控制电路来的控制相位环路的指令数据被读到只读存储器ROM中。代表电机转动相位的PG信号送到比较信号发生器,产生的比较信号加到计数器电路作为控制计数器工作的控制信号。标准参考信号也送到计数器中。数字相位伺服电路检测参考信号和比较信号之间的相位误差。计数器在参考信号的上升沿到来时开始计数时钟脉冲的个数;在比较信号的下降沿到来时结束计数。将计数器所计数据与ROM的数据在相位比较电路中相比较,两个数据相同说明电机转动的相位是正确的,相位误差为零。PWM电路输出对称的方波脉冲信号,即脉冲信号的空度比为50%,低通滤波器输出电压为2.5V,说明电机转动相位是正确的。如果计数器所计的数目比ROM中的数目小,说明电机转动相位朝前,此时PWM电路输出的脉冲的正极性部分比负极性部分宽,因而低通滤波器的输出电压增高(>2.5V),通过驱动电路使电机转动稍稍慢一点,使转动相位符合要求。当计数器所计的数目比ROM中的数目多时,情况正好相反,从而实现了对电机转动相位的控制。图10(b)示出了相位控制的示意波形图。(葛慧英)