许多无线电爱好者可能对各种遥控车、船、飞机模型很感兴趣。操纵者手持发射机,可远距离随意地遥控各种模型使其表演前进、后退、转弯和变换速度等各种动作。完成这一整套遥控任务,当然需要有发射机和接收机(见本刊1986年第4期《四通道遥控集成电路》一文),但要使模型完成仿真的各项动作,还需要设一套比例遥控伺服电路(又称舵机)。本文则向读者介绍几种比例遥控伺服电路。
比例遥控伺服电路的原理
比例遥控就其指令信息形式可分为频分制和时分制两种。频分制比例遥控是利用连续改变调制音频频率的方法送出比例遥控指令,它的解调是利用鉴频方法,获得随频率改变而连续变化的比例电压信号;时分制比例遥控是利用连续改变调制脉冲宽度的方法送出遥控指令,然后利用鉴别脉冲宽度的方法,解调出随脉冲宽度改变而连续变化的比例电压信号。两种制式相比,前者抗干扰能力较好,但线路比较复杂;后者虽抗干扰能力差,但线路简单、调整和使用方便、通用性也较强,所以得到广泛应用。
图1为时分制比例遥控伺服电路的原理方框图,现分析如下:
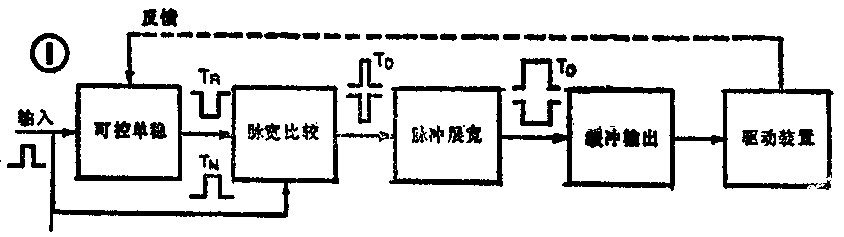
单稳电路 从遥控接收机电路解调出来的比例信号脉冲序列的上升沿(假设输入为正信号脉冲),首先触发单稳单路,产生一个与输入脉冲反相的参考脉冲T\(_{R}\)。参考脉冲TR要有较高的精度和较好的抗干扰能力。
脉宽比较电路 其作用是将输入脉冲T\(_{N}\)与参考脉冲TR进行相加比较,产生一个偏差脉冲T\(_{D}\),TD脉冲的宽度等于T\(_{R}\)与TN宽度之差。当T\(_{N}\)>TR时T\(_{D}\)为正,反之为负。当TN=T\(_{R}\)时无脉冲输出。
脉冲展宽电路 经过比较后产生的偏差脉冲T\(_{D}\)太窄,不能直接用来驱动输出级,必须经过展宽电路将TD按比例展宽放大,才能得到有足够占空比的驱动脉冲。
输出级的作用是将展宽后驱动脉冲进行缓冲放大。并且转换成等效的直流电平变化,以驱动电机或其它负载。
在闭环伺服系统中(如舵机系统)还要加入反馈电路,其目的是将输出级的状况(如舵机的舵面位置),反馈回前面单稳电路去调整单稳时间,从而改变参考脉冲的宽度,使输出级达到指令位置时驱动脉冲消失。
在业余航模活动中对比例控制的信号脉冲有统一规定,即帧周期为20ms,中心位置脉冲宽度为1.5ms,调整量为±0.5ms,如图2所示。
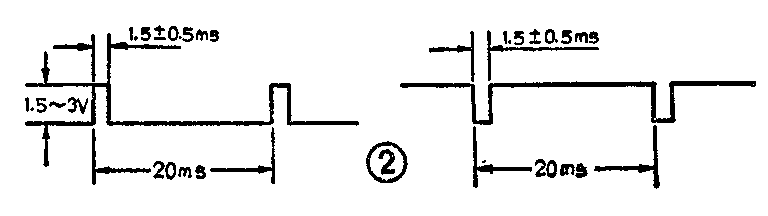
图3是一个由分立元件组成的实用比例电机位置伺服控制电路(即舵机电路)。晶体管VT\(_{1}\)和VT2组成单稳电路,该电路需要正脉冲信号触发。常态时输入端为低电平,VT\(_{2}\)由于受R1的限制而饱和导通。V\(_{R}\)接近电源电压,VD取决于R\(_{1}\)0和R9的分压,约等于\(\frac{1}{2}\)V\(_{cco}\)。VT1因受R\(_{2}\)的限制而截止。当输入脉冲的上升沿到来时,通过C2和VD\(_{1}\)耦合到VT2的基极,使VT\(_{2}\)脱离饱和区进入放大区,通过很快的一系列正反馈过程,使VT2迅速截止、VT\(_{1}\)饱和导通,电路进入暂稳态。之后C1两端的电压通过VT\(_{1}\)和R1放电,于是VT\(_{2}\)基极电位逐渐下降,当VT2基级电位减小到使VT\(_{2}\)开始导通时,又会引起一系列正反馈使VT2饱和导通,VT\(_{1}\)截止,电路回到稳定状态。这样,每米一个比例脉冲,VT2的集电极则输出一个与输入比例脉冲同步但反相的参考脉冲。该脉冲的宽度取决于单稳态时间,与输入脉冲的宽度没有关系。通过调节电位器RP,可以改变VT\(_{1}\)集电极电位,从而调节单稳态时间,改变了脉冲的宽度。VT1集电极电位提高,T\(_{R}\)宽度增加,反之TR宽度变窄。
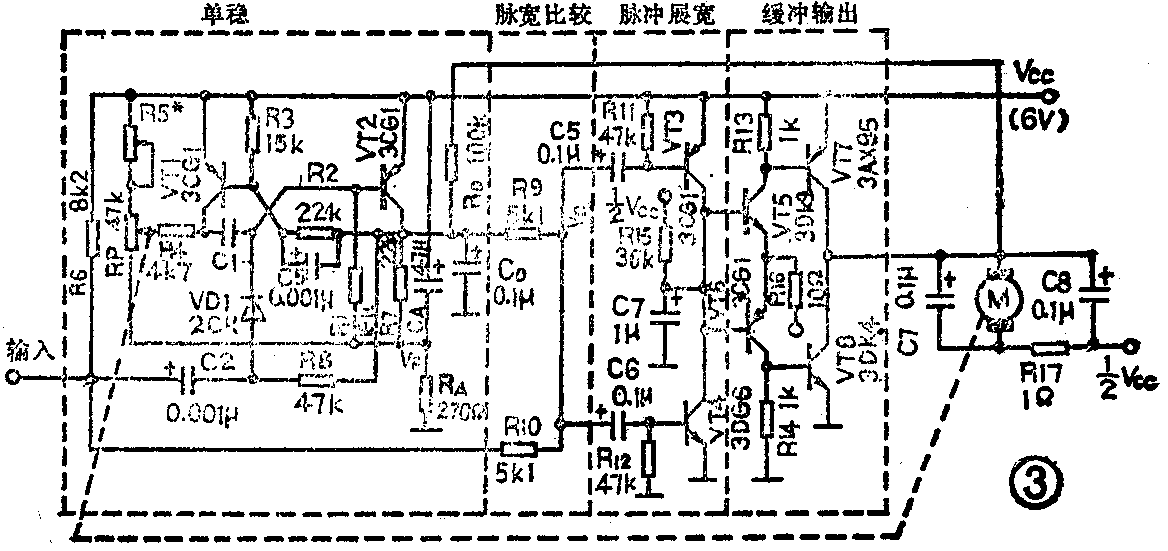
参考脉冲和比例脉冲通过R\(_{9}\)和R10进行相加比较,产生偏差脉冲。当T\(_{R}\)=TN时,无脉冲输出,VT\(_{3}\)、VT4均截止。当T\(_{R}\)>TN时,输出负脉冲,经过VT\(_{3}\)、C7和R\(_{15}\)组成的脉冲展宽放大电路,获得按比例线性展宽的驱动脉冲。其展宽原理是利用阻容电路充放电的延迟性增加三极管的导通时间。驱动脉冲经VT5和VT\(_{7}\)缓冲放大后驱动电机正转。当TR<T\(_{N}\)时,VD为正脉冲,经VT\(_{4}\)、C7、R\(_{15}\)组成的展宽电路,获得负向的驱动脉冲,再经VT6、VT\(_{8}\)组成的缓冲放大级驱动电机反转。偏差脉冲越宽,对应的输出电平越高,电机转速越快。对应于最大偏差脉冲的展宽脉冲的占空比为100%。
电机的转动经齿轮组减速后带动舵面和调节电位器同步转动。当T\(_{R}\)>TN时电机正转,舵面向左打,同时电位器RP也被左旋,使VT\(_{1}\)集电极电位下降,从而TR变窄。当舵面达到指令位置时,T\(_{R}\)=TN,电机停转。同样当T\(_{R}\)<TN时,舵面将被打向右面,RP又被右旋,使VT\(_{1}\)集电极电位上升,从而TR又变宽。当指令完成时,又使T\(_{R}\)=TN,电机停转。由于指令脉冲宽度取决于发射机方向操纵舵的操纵角,所以舵机输出轴实际上是跟踪了发射机方向操纵舵的转动而转动的。这样就实现了对航模方向舵的仿真遥控。
由于该电路增益较高,由电阻R\(_{D}\)引入了负反馈。CD的作用是滤除由R\(_{D}\)馈入的电机尖峰干扰、CA,R\(_{A}\)用于滤除通过电源引入的干扰,以防单稳电路被误触发。C7、C\(_{8}\)和R17的作用是抑制电机和电源引入的干扰。在电机转动时R\(_{17}\)也起限流作用。
如果将图3中的电位器RP换成一个固定电阻,并且取消反馈电路,就成为如图4所示的电机速度比例控制电路了。图中C\(_{4}\)的作用是对VD进行积分,以便给后面电路提供一个死区。在这一死区内,VT\(_{3}\)、VT4都不导通,以避免电路在传输过程中和单稳零脉冲宽度时电机产生抖动或偏差。展宽电路的特点是正负偏差脉冲增益分别等于\(\frac{R}{_{15}}\)R13和R\(_{16}\);R14。可以看出,只要分别调节这几个电阻,就能很容易得到所要求的正负脉冲展宽倍数。输出级采用单电源供电的桥式电路,这种电路的优点是可避免电源消耗不平衡带来的影响,并且可给输出级提供更高的电压。作为速度控制用的驱动电机往往是正转多、反转少,而且需要较大的驱动功率,采用上述输出级电路非常合适。
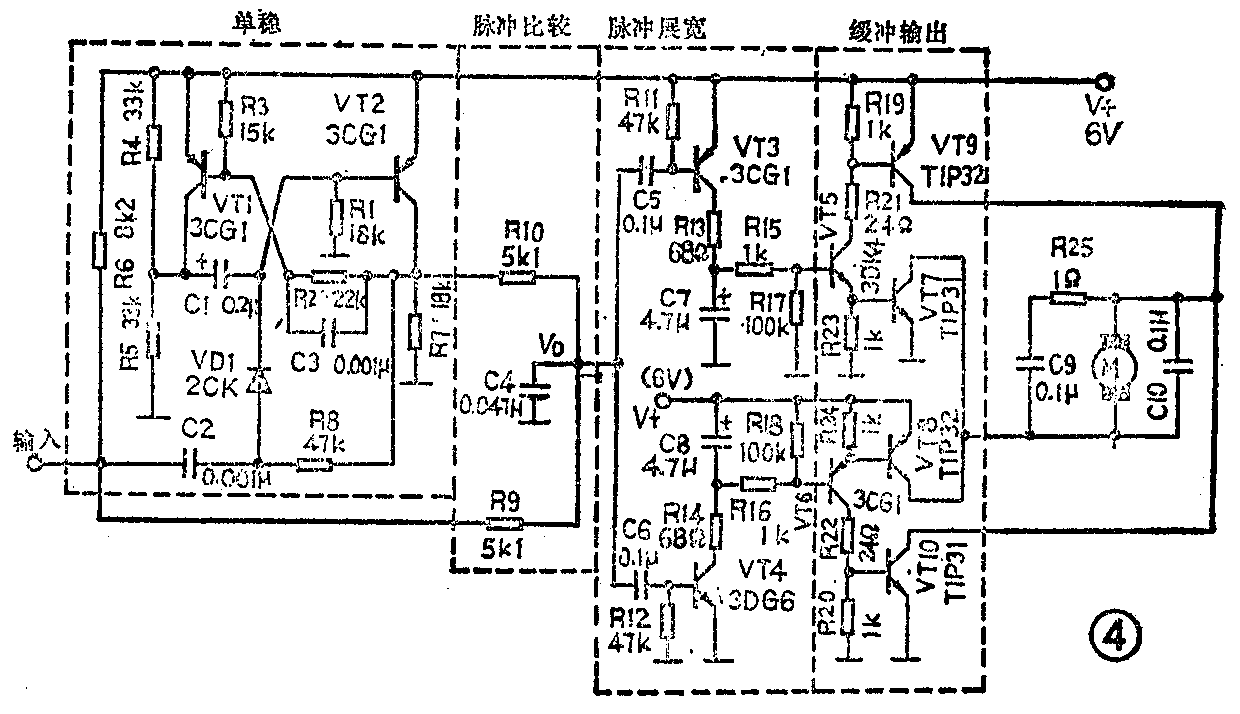
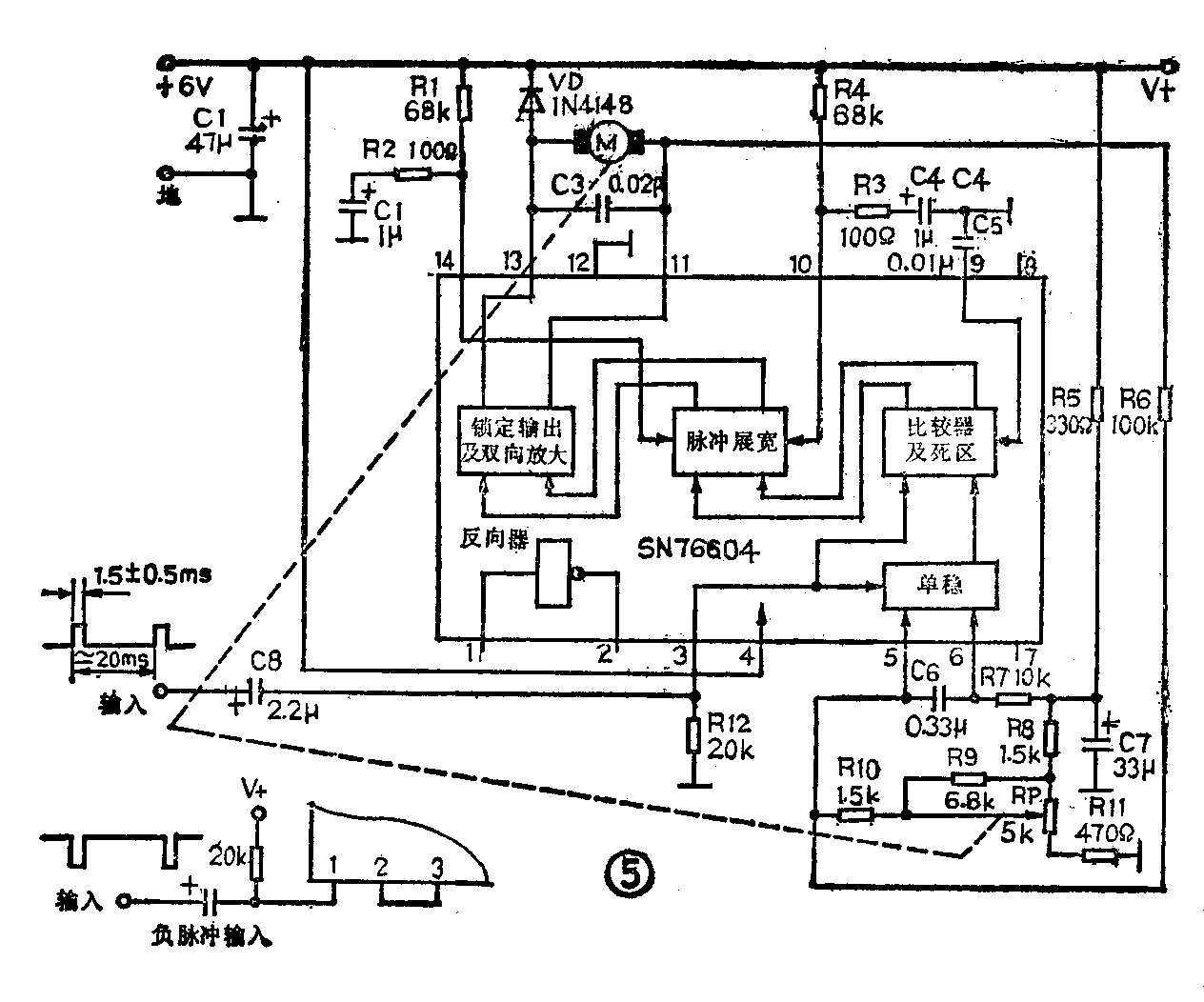
图5是采用集成电路SN76604组成的一个实用舵机电路,它的工作原理基本上与前面所分析的电路相同。图中第1、第2脚之间设置的一个反相器的作用是当输入信号为负向脉冲时将信号进行反相处理,具体接法见图5左下角所示。
舵机制作注意事项
在业余条件下制作舵机时,似乎觉得制作伺服系统的齿轮机构要比电路部分困难些,特别是在不知道如何设计转速比的情况下,实际上对齿轮机构的转速比没有太严格的要求,主要考虑以下几个问题即可:
1.反应速度:即执行机构完成控制指令所需控制时间的长短。例如,左满舵30°,0.3秒完成,那么反应速度就是30°/0.3秒。快速运行的模型反映速度应快些,越快则仿真性越好。
2.负载能力:所谓负载能力,包括电机输出力矩能力、执行机构输出轴的阻力情况,并且要考虑传动机构的效率。电机力矩小、输出轴阻力大,就只能采用较大的转速比。当然转速比增加时反应速度必然减小。
3.精度:舵机的定位精度不仅与电路部分有关,还与齿轮执行机构有密切关系。为了提高定位精度,应选用较精密的齿轮,各个轴的安装位置也必须准确。一对咬合齿轮的轴间距离等于(A齿数+B齿数)·\(\frac{齿轮模数}{2}\),应严格按照计算值来定位。为了提高定位精度,应尽量减少传动级数。
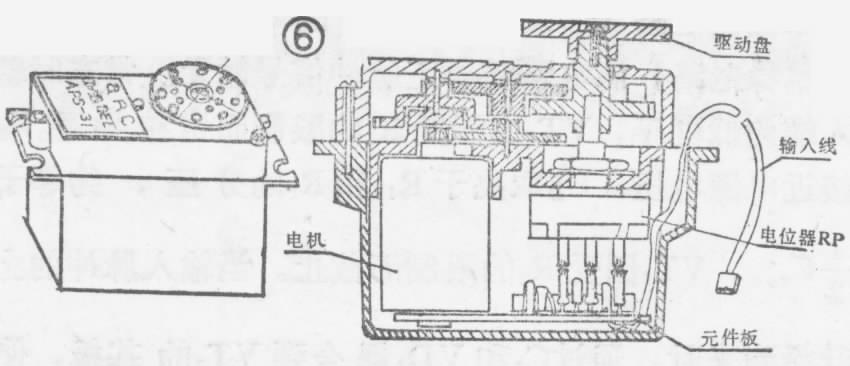
图6给出了一个商品化ARC舵机外形图和它的内部结构图,该舵机的原理图如图5,舵机体积为45×41×23(mm)\(^{3}\),采用塑料齿轮,4级减速。3根引线分别为正、负电源线及脉冲输入线。从结构上可以看出,输出动力矩盘与调整电位器是同轴安装的。电动机按指令转动时,经4级齿轮减速后驱动动力矩盘和电位器同步转动,使用很方便,输出力矩也较大。
业余自制舵机时,由于元件或机械加工方面的原因,会出现跟随误差,或者是自制速度伺服电路时出现操作中性点偏离的现象。因此在比例伺服系统中一般都要设修正环节。修正方法分电修正和机械修正两种。电修正就是在单稳电路中接入调整电位器,对单稳脉冲宽度进行细调(如图3中的R\(_{5}\));机械修正法就是在单稳调整电位器外壳上加一个带扳把的紧固环通过调整扳把,以改变单稳电位器在零脉冲时滑动点的所在位置,达到修正偏差的目的。当然也可以在发射机上对信号脉冲进行修正。
在业余制作时,如果选用的电路板较大,可将电路板安放在齿轮箱外面。齿轮箱可用敷铜板焊接而成。齿轮可选用塑料、铜、铁材料的玩具齿轮。反馈电位器选用触点压力大、耐磨损的,否则会因接触不良而出现失控现象。驱动三极管可根据电机的实际消耗电流选择。电动机应选择效率高、启动电压低、转矩较大的永磁式电机,以长型的为好。如果没有合适电机,也可用131玩具电机改制,方法是将玩具电机原线包拆除,再用φ0.09mm的漆包线绕满线槽,绕法要与原线包一致,线包三个极的圈数应相同。
在使用时还必须注意合理地选用电池,有时一台模型装好后空载试车一切正常,但一带负载时电机乱转起来,这是由于启动电流太大造成电池电压波动引起的。所以在减小电机启动电流的基础上应尽量选用容量大的电池。接在电机两端起抗干扰作用的电阻和电容应尽量直接焊在电机输入线端子上。(朱景丰)