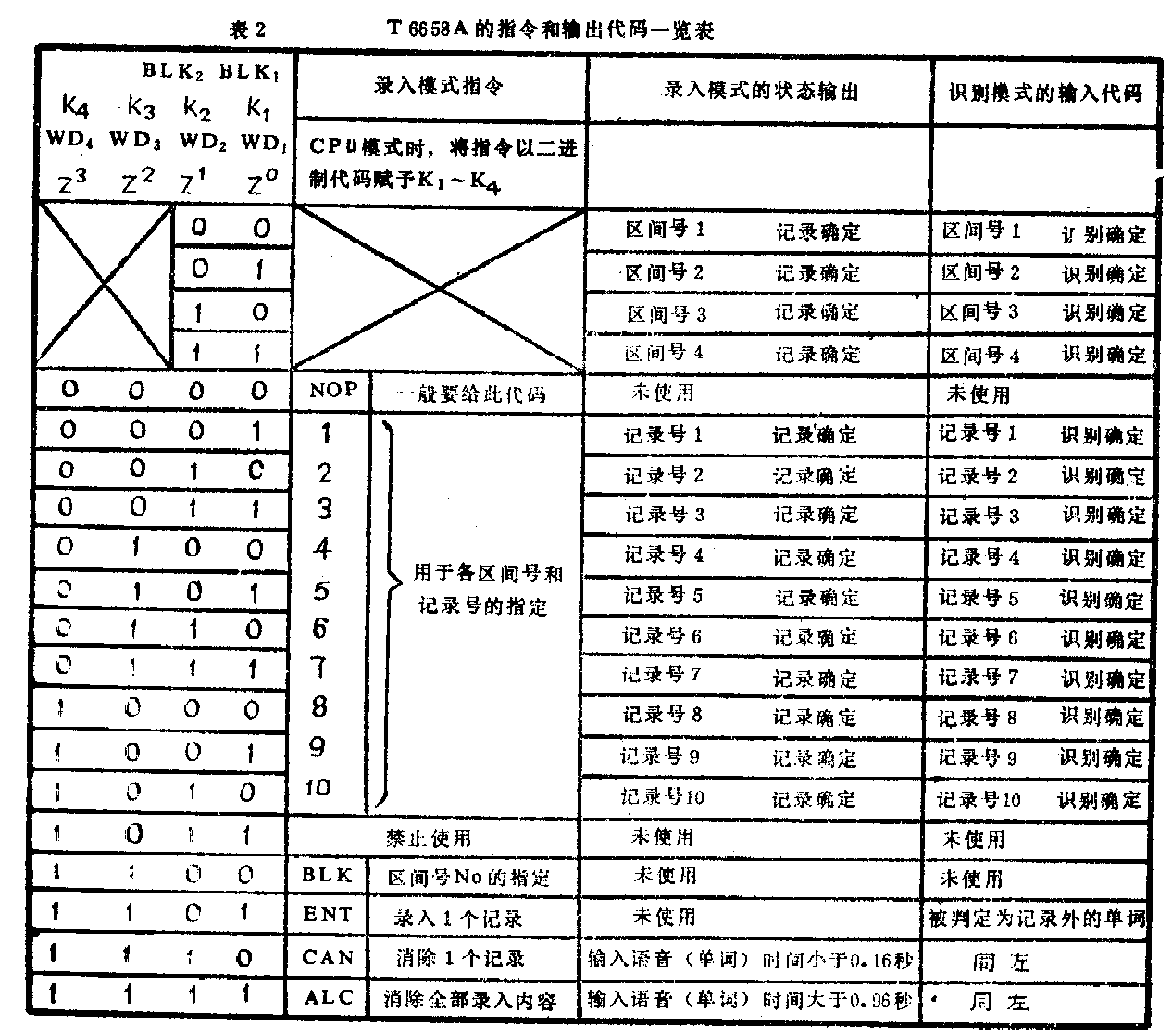
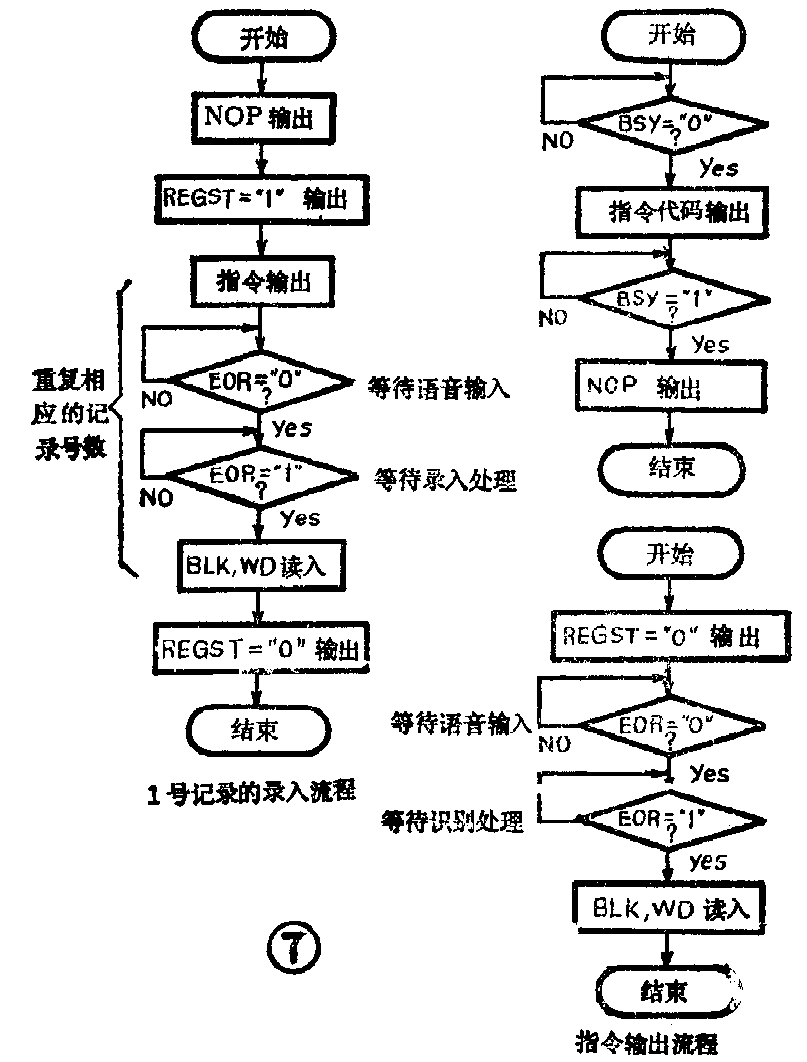
在等待语音输入状态下,只要给出除NOP(空操作)(0000)外的任意一个代码,便可中断ENT状态。③CAN指令,代码(1110)。其操作顺序为:在BLK指令后输入(n,BLK),m,CAN。该指令表示清除贮存在指定单元(区间号n,单词录入号m)中的单词。④ALC指令,代码(1111),操作ALC。该指令表示清除贮存的全部已录单词。
T6658A的识别操作是自动进行的,只要将系统设定为识别状态,而后发声即可。有一点要注意的是,T6658A在执行识别处理时,对于无单词内容的存贮单元可自行跳过,如果RAM中记录的单词数很少,在执行识别指令时可以明显地提高识别率和减少响应时间。
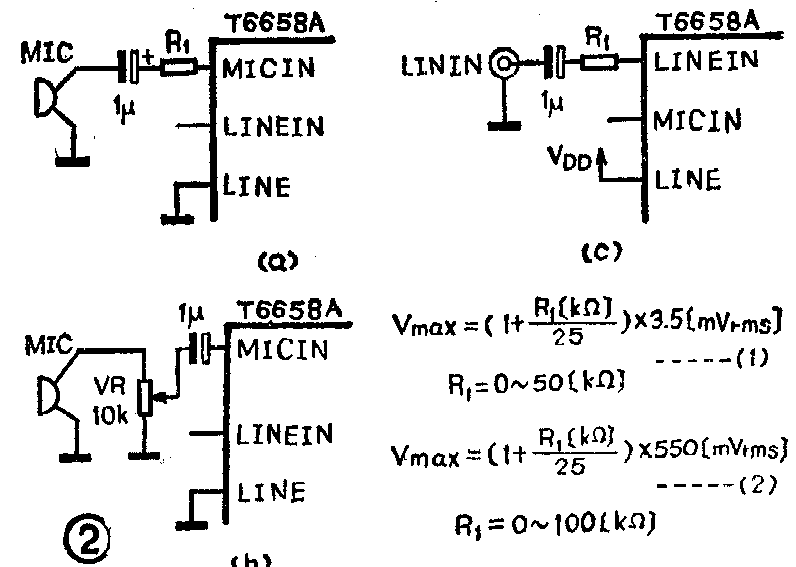
话筒与线路输入
话筒输入MICIN端的最高输入电压为3.5mV(不失真的最大允许值)。在该端串联电阻R\(_{1}\)可改变T6658A内话筒放大器的增益,扩大动态范围,如图2(a)所示。加R1后的最大输入电压值可按图2中(1)式计算。由于使用的话筒规格参数不同,其输出电压也不一致,这时就需调整R\(_{1}\)值。线路输入LINEIN端的最高输入电压为550mV,它可与盒式磁带录音机等音响设备相联接。同理,在LINEIN端串联电阻R1也可以改变其动态范围,如图2(c)。加R1后的最大允许输入电压值可按图2中(2)式来计算。设计完成后实验时,无论从MICIN或从LINEIN输入信号,都应用示波器或是代表在MICOUT端观察输出电平,可按图2(b)调节VR或改变R\(_{1}\)值,使该端输出保持在250至300mVp-p。
基本应用电路简介
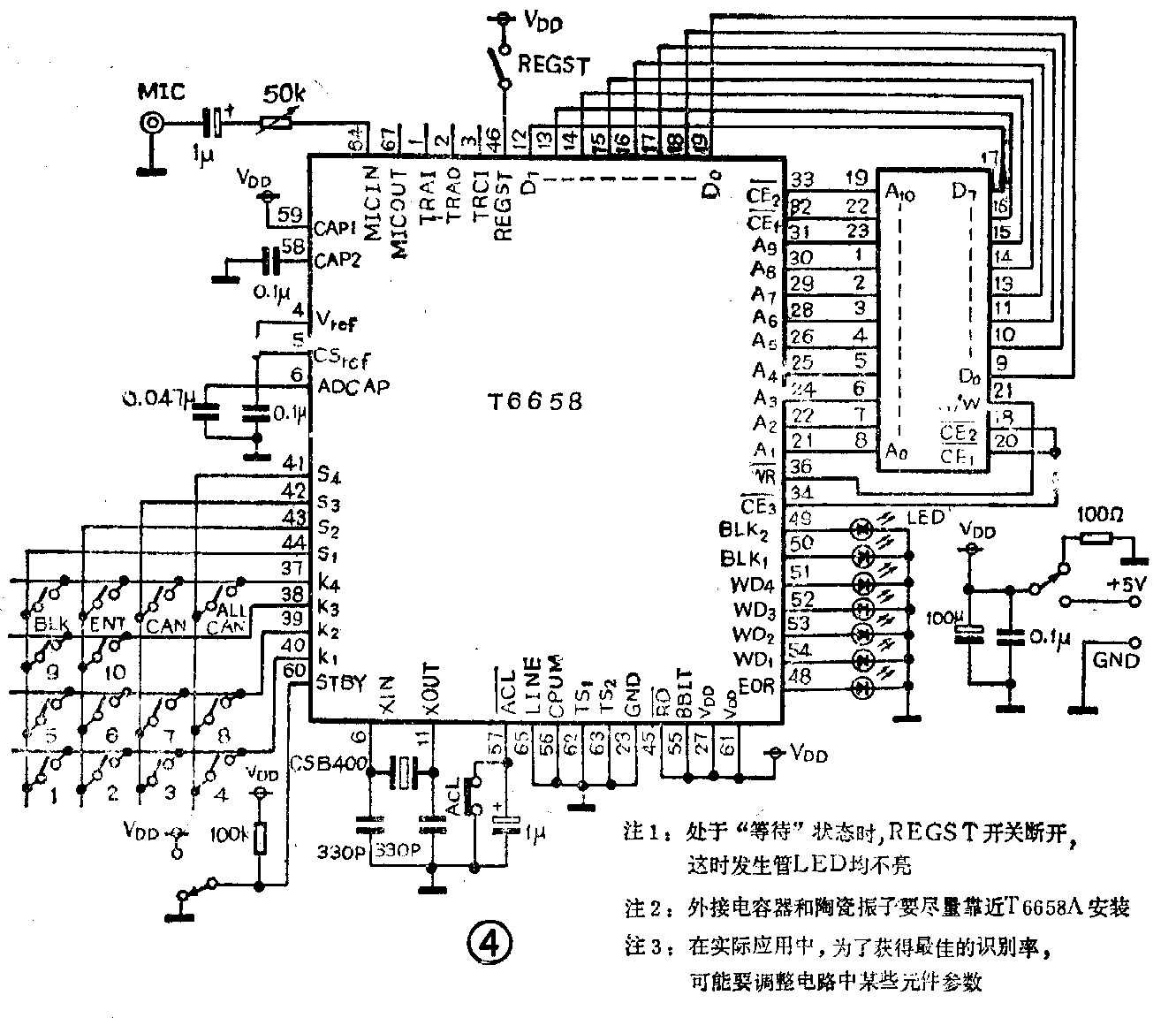
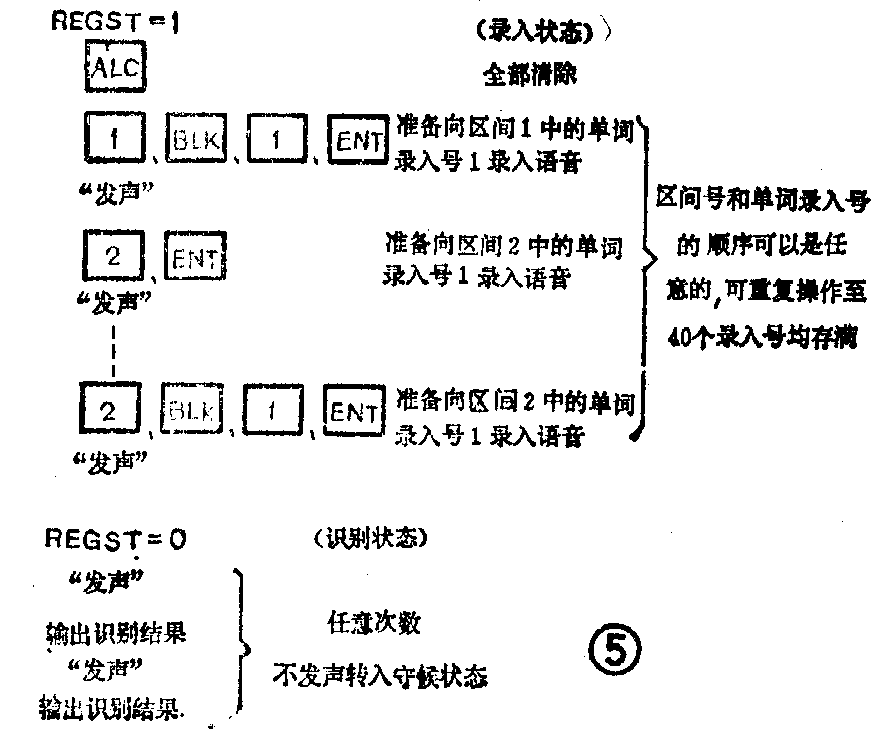
手动模式的应用电路:图4是T6658A生产厂商推荐的手动控制应用电路。图5是图4电路的操作实例说明。此时的识别结果以发光管LED输出显示,如用解码器等电路与之接口,则可通过语音来控制电器的开关或执行相应的机械动作。如日本一厂商利用T6658A制作的一种语音控制机器人,可听懂日语发音,做出鞠躬、行走、挥手、点头致意等动作并能说话,妙趣横生。
CPU模式的应用电路:我们以Z80A为例说明CPU模式的应用。图6为其典型电路。用一片74LS136作地址译码器,并行接口电路Z80APIO的口A做为CPU的输入口,可读取BLK\(_{1}\),BLK2,WD\(_{1}\)~WD4的数据,此外将EOR端与A—STB-相联接让T6658A选通PIO。口B做为CPU的输出口向T6658A发出指令,以设定各种模式进行诸如话筒/线路输入的转换等操作。BSY端反相后可与B—STB-相接,以通知PIO告知T6658A可接收指令。
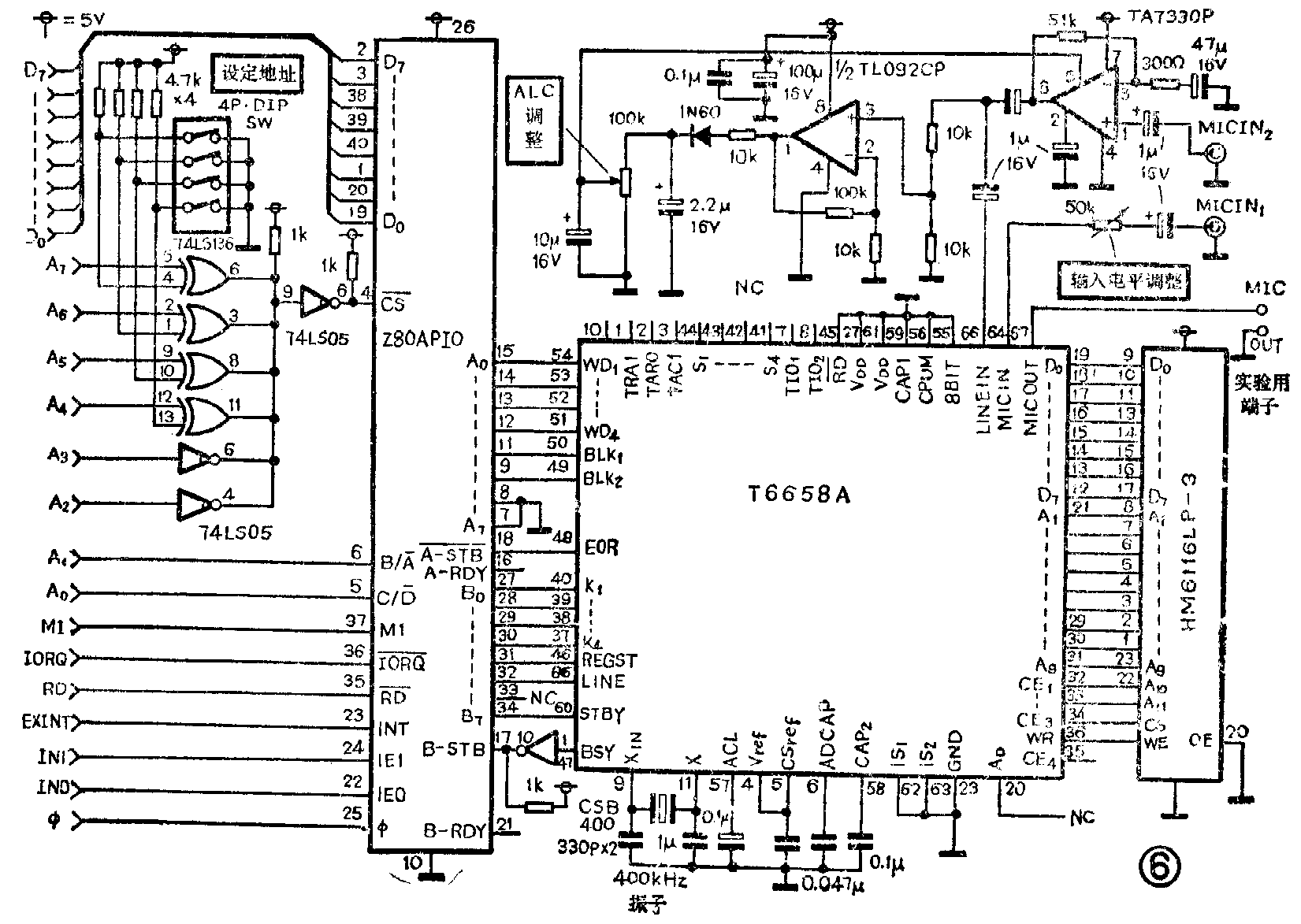
为稳定信号输入电平,提高识别率,增加一级由TA7330P和TLO92CP组成的带自动电平调整(ALC)的前置放大器。MICIN\(_{1}\)播孔直接与T6658A相接;MICIN2则经ALC前置放大后输入。TA7330P开环增益为50dB(标准值),ALC范围40dB,反馈电阻(51kΩ)应根据所用话筒输出电压值做调整,使64脚输入为500mVrms,TLO92CP将前置级的输出取出部份分量作为ALC取样电压反馈至T7330P的第5脚上(ALC控制),电压范围1~2V。在1V时,前置级增益最大,2V时最小。调整反馈电阻(100kΩ)使前置级输出稳定在500mV。调整与该电阻相并联的10μF电容值,也可改变ALC的响应速度。(周伟都)