长海VF-2215型放象机的伺服和控制系统电路如图1所示,由集成电路IC\(_{1}\)~IC10和外部元器件组成。伺服系统对磁鼓电机和主导轴电机进行自动控制,使其速度和相位始终稳定在标准范围之内。控制系统沟通了面板功能键与机械传动系统及控制电路之间的联系,完成工作方式选择、各种检测与保护及各种电路控制。以下对两个系统的工作过程作一简要的介绍。
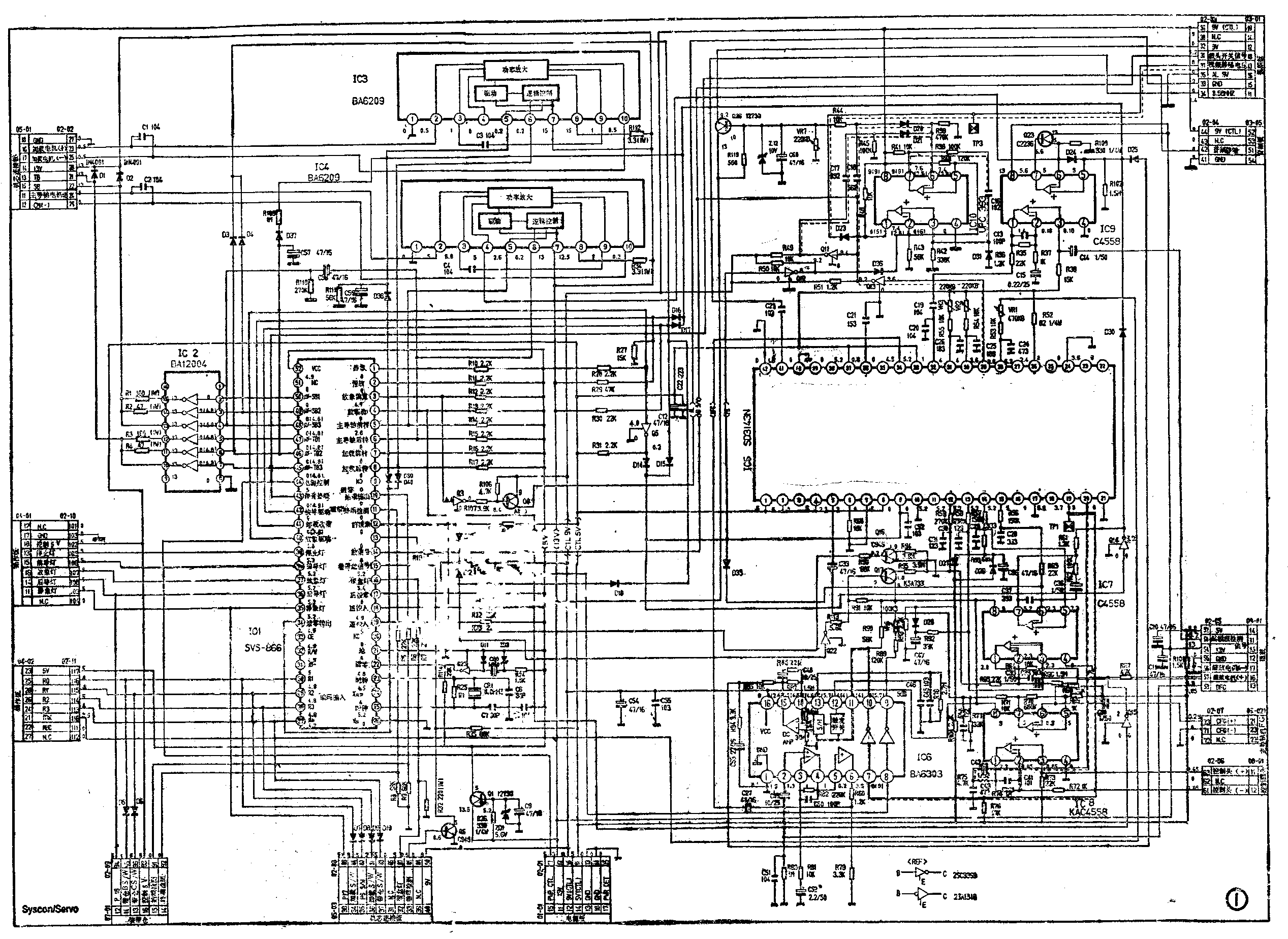
伺服系统
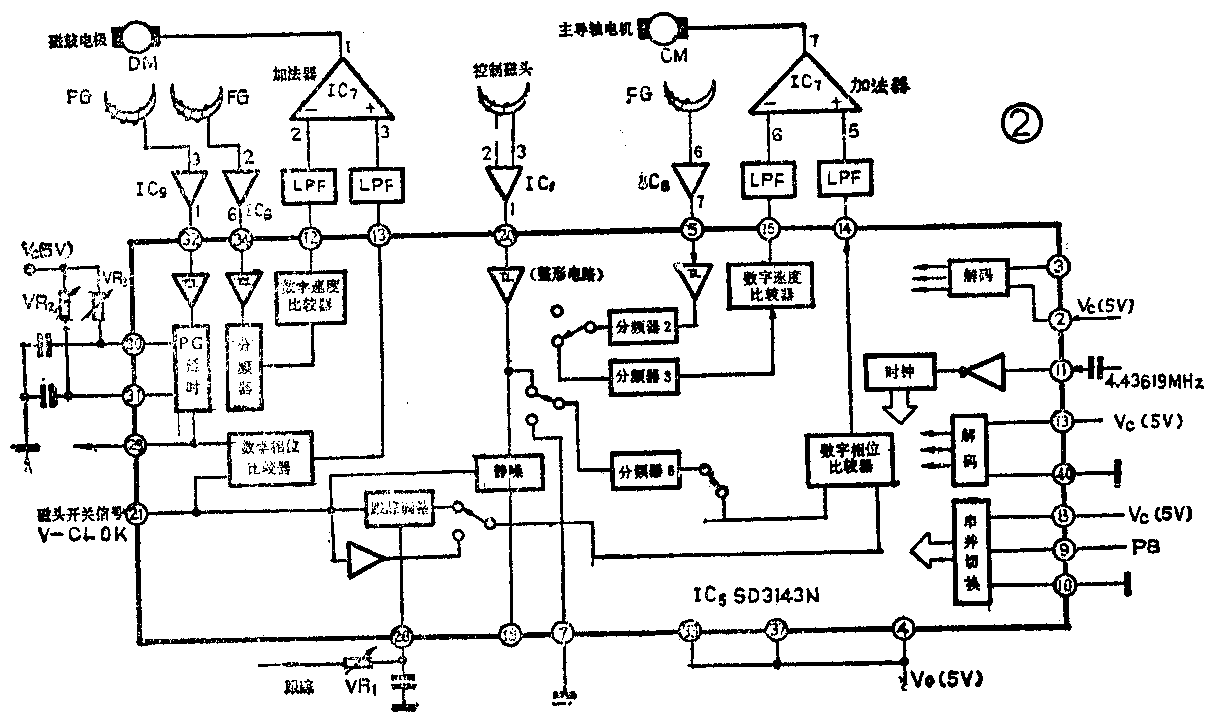
伺服系统实际是对磁鼓电机和主导轴电机进行自动控制的电路系统。主要由集成电路IC\(_{5}\)和IC6~IC\(_{1}\)0中部分电路及外部元器件组成。IC5的内部方框简图如图2所示。
1.磁鼓电机伺服电路:磁鼓电机伺服包括速度控制和相位控制两个环路。速度控制保证磁鼓电机以25转/秒的速度稳定地转动,相位控制保证磁鼓上两个视频磁头准确地扫描各自对应的磁迹。
(1)速度控制电路工作过程:磁鼓电机启动后,装在磁鼓上的速度信号检测器(FG)产生一个600Hz正弦检测信号,送到IC\(_{6}\)的2脚内的放大器,信号放大后又从6脚输出送入IC5的34脚内的整形电路,将正弦信号变成标准方波,再送到数字速度比较器进行鉴别,将检出的速度误差变成可调脉宽方波由IC\(_{5}\)的12脚输出。经由R59和C\(_{31}\)组成的低通滤波器变成近似直流信号,送到IC7的2脚内的加法器与3脚输入的相位控制信号相加,然后从1脚输出加到磁鼓电机的正极,对磁鼓电机的速度和相位进行调整。
(2)相位控制电路工作过程:磁鼓上装有一个相位检测信号发生器(PG)。磁鼓电机启动后,该发生器产生一个25Hz相位检测信号送到IC\(_{9}\)3脚内的放大器,信号放大后从1脚输出又送入IC5的32脚内的整形电路,变成标准方波又经延时电路后,一路从29脚输出送到控制电路IC\(_{1}\)作磁鼓转动的检测信号。同时也送到视频信号处理电路作控制转换用的25Hz磁头开关信号。调整与30脚和31脚相连的电位器VR2和VR\(_{1}\),可改变磁头开关信号的切换时间。另一路送到数字相位比较器进行比较,检测出来的相位误差变成脉宽可调方波由IC5的13脚输出。再经由R\(_{58}\)和C30组成的低通滤波器变成直流信号送入IC\(_{7}\)的3脚内的加法器中。
2.主导轴电视伺服电路:它也有速度控制和相位控制两个环路。其作用是保证磁带运行速度稳定,使两个旋转视频磁头在25转/秒转速下正好扫过50条磁迹,而且磁头与磁带上的磁迹能够对正。
(1)速度控制电路工作过程:主导轴电机启动后,电机组件上装的速度检测信号发生器(FG)产生一个300Hz正弦速度检测信号,先经IC\(_{8}\)6脚内的放大器放大后从7脚输出,送入IC55脚内的整形电路,变成标准方波,再送到数字速度比较器进行比较,检测出的误差值变成脉宽可调方波由IC\(_{5}\)的15脚输出,经由R56和C\(_{28}\)组成的低通滤波器转换成直流信号,送到IC76脚内的加法器,与相位控制信号汇合。
(2)相位控制电路工作过程:相位检测信号由控制磁头从磁带下沿取出,它是一个在录制时同其它信号一起记录在磁带上的25Hz脉冲信号。由控制磁头拾取的信号先经IC\(_{8}\)的2、3脚内的放大器放大后由1脚输出,再送入IC520脚内的整形电路变成标准方波,由数字相位比较器进行比较后检出相位误差,将其变成脉宽可调方波由IC\(_{5}\)的14脚输出,经由R57和C\(_{29}\)组成的低通滤波器变成直流信号,再从IC7的5脚输入,与6脚输入的速度控制信号在加法器中相加,由7脚输出经D\(_{3}\)0送到主导轴电机的激励级IC9的5脚,从9脚输出的被放大的信号经Q\(_{23}\)送到主导轴电机驱动级IC3的4脚,经功率放大后从10脚输出加到主导轴电视,对主导轴电机的驱动电压进行调整,即对主导轴的速度和相位进行校正,保证它按设计要求稳定地工作。
控制系统
该机控制系统由一块52个引脚的4位单片微机IC\(_{1}\)(SVS—866)和一些外部元器件组成,如图1所示。下边对各种控制作一简要介绍。
1.工作方式选择:通过该控制系统,能根据使用者的要求进行各种工作方式的选择,完成放象、前后快速走带、前后快速搜索和静象等操作。它是采用矩阵形式的键输入方式,由IC\(_{1}\)的35、36、37、38和39脚发出的扫描信号送到操作板。当使用者按下某一操作键时,操作板上的工作方式选择电路就输出一个4位编码信号,从IC1的27、28、29和30脚输入,微机根据编码信号的形式发出相应的指令,控制机器进行某项操作。同时点亮相应操作的指示灯。
2.检测和保护过程:为了保证放象机正常工作,在机器的走带机构装有一些传感器和位置开关,对机器的运行状态随时检测,检测结果送到IC\(_{1}\)。当出现故障时,IC1通过对检测信号的识别发出相应指令使机器进入保护状态,并使指示灯不断闪烁以通知操作者。
(1)带头和带尾检测:该项检测是由带头和带尾传感器及带盒灯构成。由于磁带两头是透明的,当磁带运行到头或尾时,带盒灯发出的光就会透过透明磁带照到相应的光电三极管传感器上。这时输出一个高电平信号加到IC\(_{1}\)的10脚(带头传感信号)或11脚(带尾传感信号),IC1立即发出相应的指令,使磁带到尾时进行快速回绕或退带,当磁带到头时进行重放或退带。
(2)磁鼓电机运行状态检测:磁鼓电机工作后,伺服电路将磁鼓相位信号(25Hz方波)送到IC\(_{1}\)的14脚。如果磁鼓电机在加载后不转或转速不正常,当超出了伺服电路调整范围时,微机就会发出自动保护指令使机器卸载退带。
(3)主导轴电机运行状态检测:在收带盘底部装有卷带信号传感器。因为收带盘转动是由主导轴电机带动,所以磁带运行时卷带信号传感器所得到的检测信号,不仅反应了卷带盘的工作情况,同时也反应了主导轴电机的运行情况。这个检测信号经Q\(_{6}\)送到IC1的15脚。微机通过对15脚信号的识别,当判断主导轴电机有故障或卷带盘有问题时,执行退带保护程序。
(4)自动保护:当机器的电源或电路出现故障时,接通220伏市电后机器立即进入保护状态,即IC\(_{1}\)的44脚的电源启动控制信号消失,则机器主电源不能启动。此时停机指示灯发出闪烁信号通知操作者。
3.电路控制过程:正如上述,当机器工作在某一方式时,就有一个编码信号送到IC\(_{1}\)。微机根据编码方式发出一个相应的指令信号到具体执行电路,完成某一操作。
(1)放象控制过程:当按下放象键时,IC\(_{1}\)便收到一个放象编码信号,由它的4脚输出一个低电平信号,经Q15变成2伏左右的驱动信号加到磁鼓电机正极,使磁鼓电机启动运转。与此同时,IC\(_{1}\)的40脚输出一个高电平信号,经Q5和D\(_{14}\)后分3路送到不同电路。一路经Q14和Q\(_{3}\)0送到主导轴电机激励电路IC9的5脚,使主导轴电机启动。另一路送入IC\(_{5}\)的9脚,控制IC5的信号输入方式。第三路是经Q\(_{12}\)和D36送到IC\(_{1}\)0,与IC5的29脚取出的25Hz方波在IC\(_{1}\)0内进行两次比较,产生一个静噪电压锁定信号并从1脚输出,送到视频信号处理电路,对视频信号的输出进行控制。
(2)图象快速搜索的控制过程:当同时按下放象和前、后快速走带键时,机器就会进入前、后搜索状态,此时没有伴音输出,图象播放速度比正常快两倍。这时IC\(_{1}\)的12脚和17脚输出一个低电平,经D13、D\(_{12}\)和Q2加到IC\(_{6}\)8脚内的放大器,经放大后又进入IC612脚内的触发开关电路,与由IC\(_{5}\)送来的主导轴相位检测信号一起开启开关电路,这个电平又经直流放大器放大后从15脚输出加到IC9的5脚,去激励主导轴电机使其转速提高。
另外IC\(_{1}\)的12和17脚输出的低电平信号分别经Q16、Q\(_{22}\)和Q17,一起加到IC\(_{7}\)的2脚与磁鼓电机速度调整信号叠加,对磁鼓电机的转速作相应调整,使磁鼓电视与主导轴电机相谐调,以保证搜索时磁头与磁带尽量对正。
(3)录、放偏置状态控制:该机视频信号处理电路采用的三块IC是录、放两用集成块,工作状态由录、放偏置电压决定。放象时IC\(_{1}\)的3脚输出一个高电平信号使Q4饱和,9伏电源电压便送到视频处理电路IC\(_{2}\)03,使电路工作在放象状态。
(4)音频信号静噪控制:放象时IC\(_{1}\)的43脚输出一个低电平信号,送到音频信号处理电路IC101,打开静噪门使音频信号输出。其它工作方式时IC\(_{1}\)的43脚输出都是高电平,使静噪门关闭而无音频信号输出。
(5)主导轴电机驱动电路的控制:IC\(_{1}\)的5、6脚分别接到主导轴电机功率驱动块IC4的5,6脚。主导轴电机的正、反转由IC\(_{1}\)的5、6脚输出电平高低来决定,即IC4收到从IC\(_{1}\)送来的信号后通过内部逻辑电路使它的2脚和10脚输出的驱动电压改变。正转时IC1的5脚输出一个高电平信号,IC\(_{4}\)的2脚输出为高电压。反转时IC1的6脚输出高电平信号,IC\(_{4}\)的10脚输出为高电压。而IC4输出电压的幅度取决于激励级Q\(_{23}\)送到IC44脚的电压的高低。
快速走带时由IC\(_{1}\)的42脚输出一个高电平控制信号,经D17送到激励级IC\(_{9}\)的5脚,使IC44脚输出的激励电压提高。
卸载时为了使磁带能正常收紧到带盒内,IC\(_{1}\)的41脚输出一个高电平脉冲控制信号,经D16送到IC\(_{9}\)的5脚使激励电压有一个瞬时的提高,使主导轴电机有很短时间的快转而把磁带收入带盒内。
(6)装盒、加载电机的驱动控制:该机装盒入仓和加载是用一个电机,由到位开关和行程齿轮控制。它的正、反转由IC\(_{1}\)的7脚和8脚输出电平的高低来控制,这两个脚与加载电驱动功率电路IC3的5、6脚相连。装盒入仓和加载时电机正转,IC\(_{1}\)的7脚输出高电平信号,电机反转时IC1的8脚输出高电平信号。
(7)电源控制:开机后IC\(_{1}\)44脚输出高电平信号送到电源板,使主电源启动输出5伏和9伏电压。
(8)卷带盘制动控制:供带盘和收带盘的底座上装有制动器。IC\(_{1}\)的45、46、47脚输出取消制动的信号,IC1的48、49、50脚输出加上制动的信号。加上制动的3路信号经IC\(_{2}\)后合成1路,共有4种状态(放象、搜索、停止、倒带)的4个信号加到卷带盘制动器上。取消制动的3路信号也经IC2合成1路,同样有4种状态的4个取消信号加到卷带盘的制动器上。根据各种工作的不同要求,IC\(_{1}\)的这6个脚输出不同信号,产生相应的制动状态。(郑大光)