录像机的鼓电机和主导轴电机是机器的关键组件。它使用的是直流电机,传统的直流伺服电机是用整流子(换向器)和电刷来完成电枢若干绕组的切换和电流的换向,电刷和整流子的摩擦会引起整流子的磨损,电刷的粘污又会造成接触不良和火花干扰,这些都影响机器的性能和寿命。70年代末由于集成电路的发展和霍尔元件的应用,设计出一种电子开关来取代机械整流子和电刷的无刷直流电机,霍尔元件做在定子内,自动控制电子开关按时切换。现代录像机就是采用这种电视。以下就霍尔元件的特性和在录像机中的应用电路作些简单介绍。
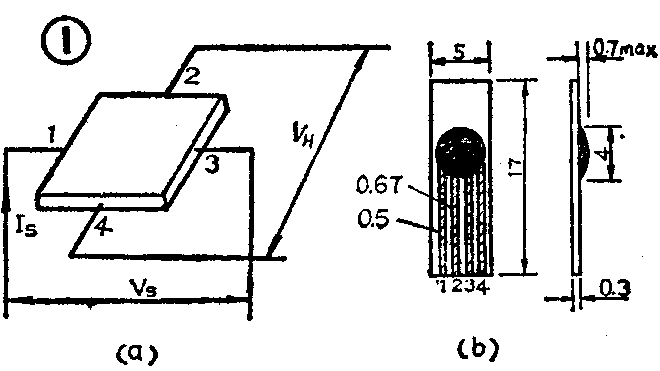
1.霍尔元件:霍尔元件是利用霍尔效应制成的磁敏传感器。它是一块有四个接点的长方形半导体晶片,称霍尔片,如图1(a)所示,图1(b)是它的外形图。其中接点1和3通以直流电流(I\(_{s}\)),被称为控制电流极;接点2和4产生电势差(VH),称霍尔电势极。
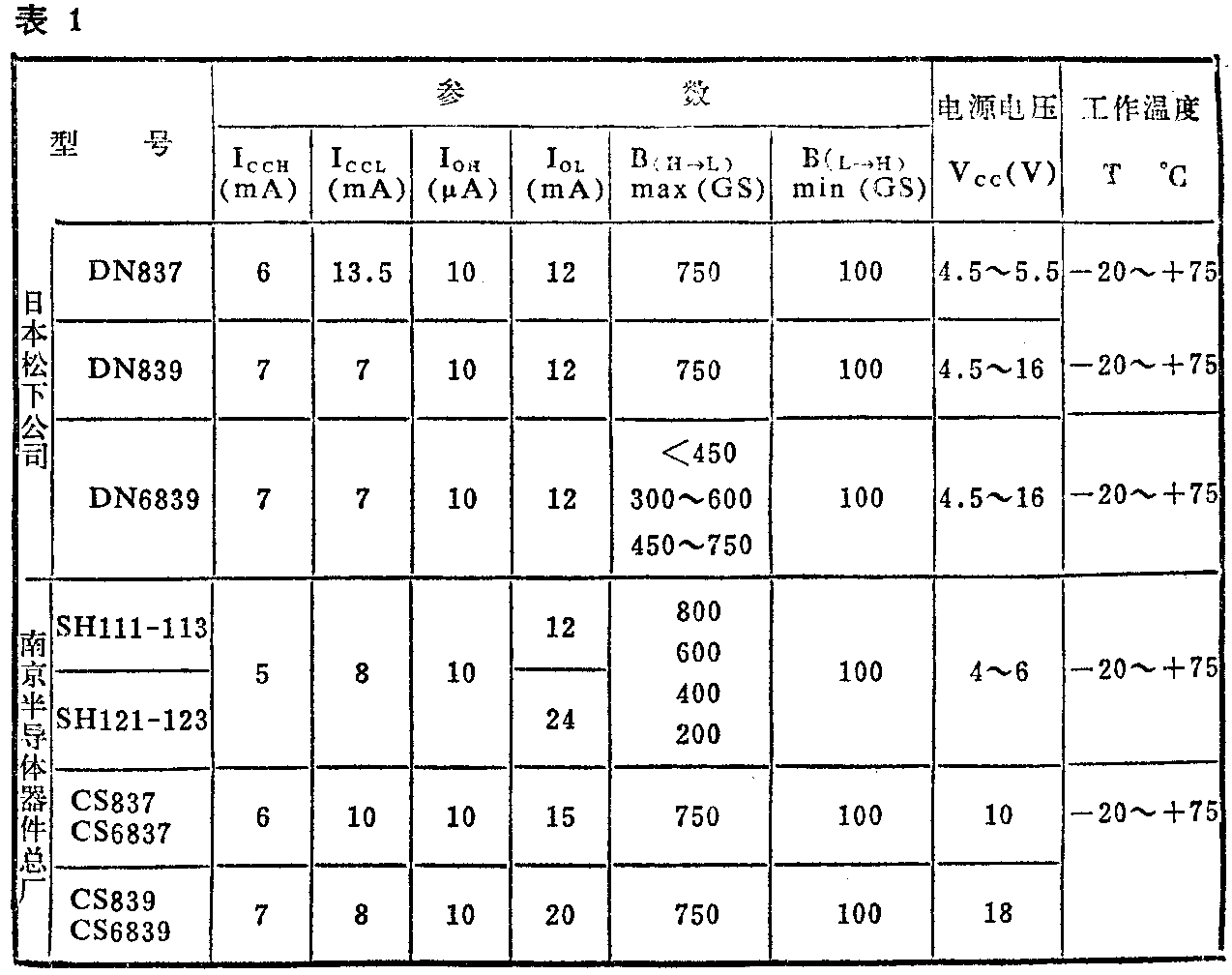
在实际使用中是将霍尔元件做在集成电路内部,传感的电压在集成块内经处理以后再输出,称霍尔集成电路。按输出信号分霍尔开关集成电路和霍尔线性集成电路两种。录像机中使用的是霍尔开关集成电路,用它直接驱动无刷直流电机。表1列出几种国内外型号电路参数供参考,表1 I\(_{CCH}\)表示电路输出截止时电源电流,ICCL表示电路输出导通时电源电流,I\(_{OH}\)表示电路输出截止时输出端漏电流,IOL表示输出导通时输出端最大负载能力,B\(_{(H→L)}\)表示电路由截止变为导通时所需的最大磁感应强度,B(L→H)表示电路由导通变为截止时的最小磁感应强度,V\(_{CC}\)表示集成电路的电源电压。
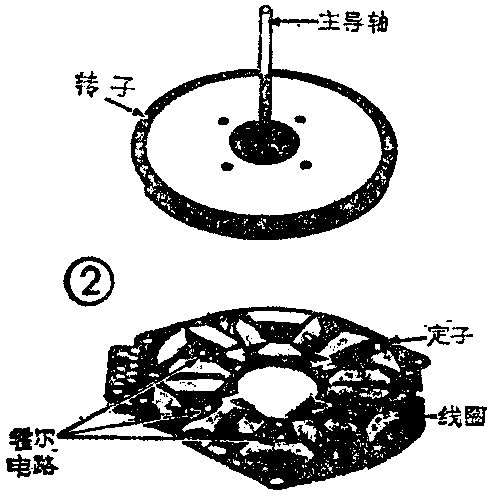
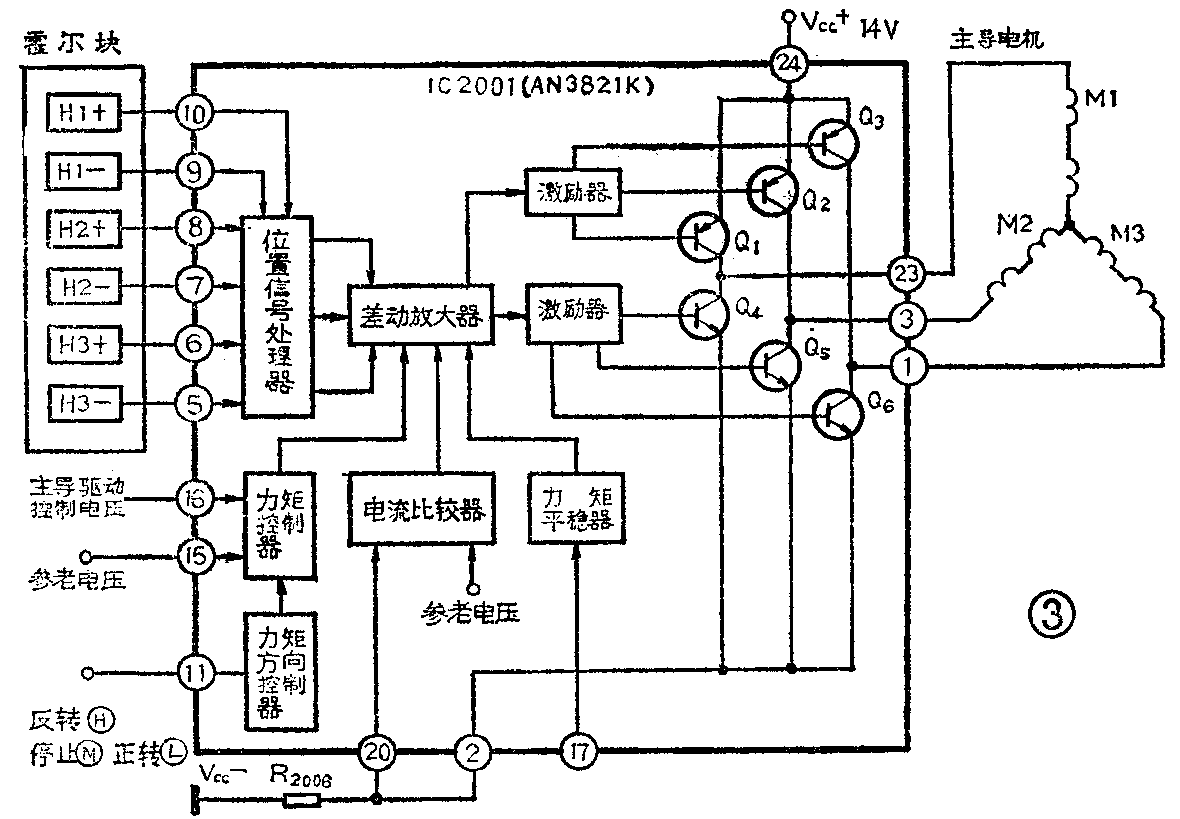
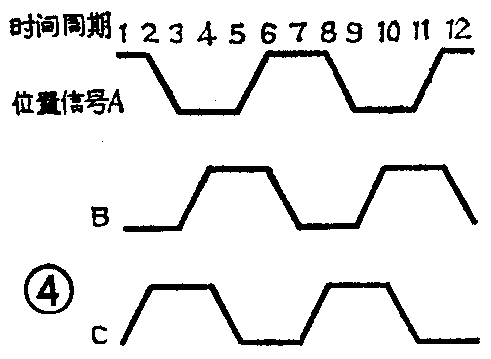
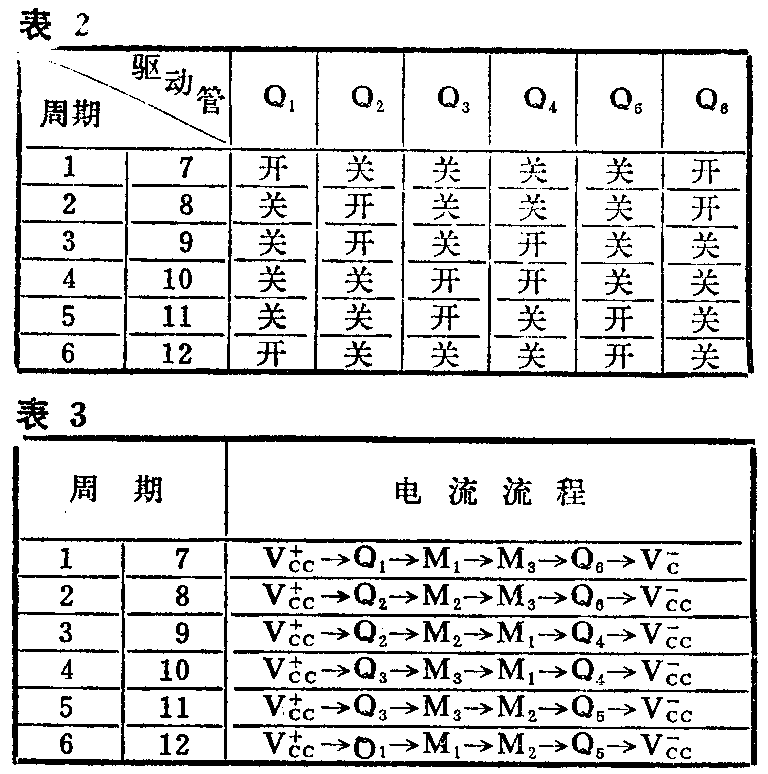
2.录像机中应用电路:这里以松下NV-G10机为例进行说明。图2示出该机主导电机结构的示意图,电机定子有六个扁平状绕组线圈,线圈平面和定子平面平行,每个绕组相差60°,相隔180°的两个绕组首尾相接串联成一相,因此共有三相并以M\(_{1}\)、M2、M\(_{3}\)表示,接成Y型如图3所示。每相绕组轴线上都有一块霍尔电路,三块霍尔电路的控制电流极串联通以直流电流,它们的电势正负极分别接到主导电机驱动电路IC2001的三组位置信号输入端(5~10脚)。在定子上面罩着一个拥有四对磁极的永磁体转子,磁极成扇形均匀分布(每个占45°),磁极对着定子线圈,磁力线垂直于霍尔片平面。当转子不动时,霍尔电极输出的霍尔电势不变。当转子旋转时,加到霍尔片的磁感应强度发生变化,霍尔电极输出的霍尔电势就随着变化,分别向IC\(_{2}\)001输入位置检测脉冲信号。三组信号经过IC2001内部的位置信号处理器和差放整形后产生如图4所示的位置信号,再经激励器去推动六只驱动管(Q\(_{1}\)~Q6),使它们轮流进入开(饱和导通和关(截止)两种状态,使流经定子线圈中的电流不断在三相绕组间切换和换向。表2和表3分别列出位置信号在不同周期时,驱动管的开关状态和电机线圈绕组中电流的流向。由表中看出驱动管有规则地开和关,而使绕组中电流也有规则地不断切换和变化,所以每个绕组线圈在定子平面法线方向都产生各自的交变磁场,线圈的磁场和转子永久磁体的磁场相互作用,就对转子产生同一方向拖或拉的力矩,形成电机转子的旋转动力,转子旋转磁体又不断使霍尔片产生交变电势脉冲,引起定子线圈中电流变化,又产生旋转交变磁场而推动转子运动。这样就使主导电机不停地旋转。IC\(_{2}\)001内部还有力矩控制电路、力矩方向控制器、电流比较器、力矩平稳器等,它们分别接到伺服电路相应的输出端,这样主导电机的力矩大小和方向受伺服电路的控制,使主导电机的速度和相位都满足走带的要求。
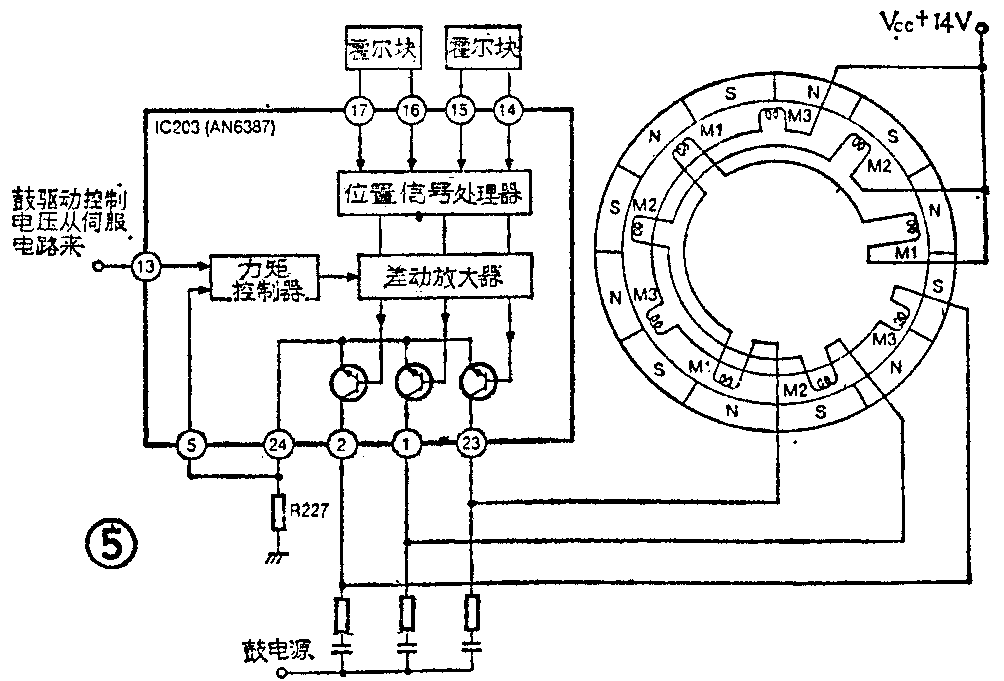
NV-G10机的鼓电机驱动电路如图5所示,它同主导电机的驱动原理是一样的。但从图看出具体驱动集成电路内部结构、霍尔片的个数、电机线圈绕组以及转子磁极对数却不一样。所以在维修时要注意选用各自对应的型号,否则就无法正常工作。(於志根)