在介绍自动反转机原理之前,首先介绍自动反转机使用的磁头和磁迹的切换方式。
双声道四磁迹磁头 自动反转机使用的磁头与普通录音机使用的磁头不同。磁头结构见图1。两者的区别在于声迹的排列不同。
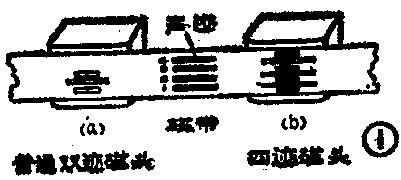
在普通的录音磁带上,录有4条磁迹。磁头在工作时总是取磁带上的两迹信号。普通录音机是通过翻转磁带,由磁带A面翻至B面或由B面翻至A面实现磁迹转换。而自动反转机使用的磁头如图1(b)所示,为四声迹,构成两个立体声系统。工作时磁头的4条声迹同磁带上的4条声迹重合,利用机内的磁迹控制信号转换开关,分别重放其中的1迹和2迹(磁带A面)或3迹和4迹(磁带B面)音频信号,不需要人工翻转磁带盒,就可以将A、B两面的音频信号全部放完。
磁迹的切换方式 磁迹的切换方式一般有磁头旋转式——即在磁带带终时,磁头受到指令控制迅速旋转180°,完成磁迹间的切换。这种切换方式要求机芯中的磁头旋转机构有极高的旋转定位精度,否则会产生方位角误差,直接影响录、放音效果,且机芯结构比较复杂,体积也不宜袖珍化。目前实现磁迹间信号切换使用较多的是开关式,即磁头固定不变,机芯直接控制开关,切换A、B两面的信号,实现磁迹间的转换。采用该结构,磁头和磁带之间除正常过带的相对运动外,没有任何附加运动。这种切换方式的录音机拾取音频信号的好坏,关键是磁头的制造技术。
下面以HS-P\(_{2}\)机为例介绍这种自动反转的实现方法。
HS-P\(_{2}\)型袖珍式立体声自动反转放音机的反转方式采用的是机械控制转换方式。该机具有手动控制磁带运行方向和自动反转控制磁带运行方向两种功能。在放音过程中可以利用手动控制随时任意转换磁带的运行方向。或者利用自动反转机构完成磁带带终的反向运行,连续听完磁带的A、B两面的歌曲。
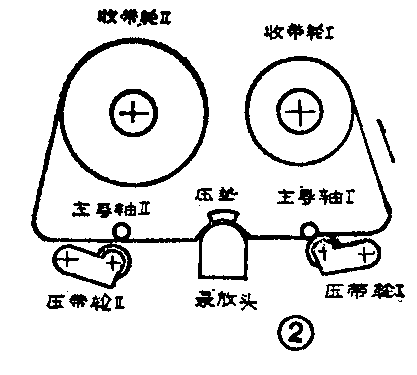
传动系统 为了实现自动反转,机芯上设有两个主导轴,两个压带轮,两个收带轮,其中两个压带轮两个收带轮都可作为主动轮进行收带,结构示意如图2。当按下放音键时,机械部分始终保持如下循环动作,当磁带向右走带时,压带轮Ⅰ压在主导轴Ⅰ上,(压带轮Ⅱ处在暂停状态,收带轮Ⅰ作为主动轮收带,收带轮Ⅱ作为供带轮供带。磁迹转换开关处于1、2迹的位置上。当磁带运行终了时,通过收带轮Ⅰ和收带轮Ⅱ(供带轮)同时发出换向指令,换向机构接到指令后开始工作,各机构配合动作,将收带轮Ⅰ、压带轮Ⅰ推置于暂停工作状态,收带轮Ⅰ转换成为供带轮。原来处于暂停状态的压带轮Ⅱ进入工作状态,压在主导轴Ⅱ上,同时收带轮Ⅱ解除供带被动状态,转换为主动收带状态。在这一系列动作的同时,转换开关控制磁头完成了磁迹之间的信号转换,即由原来的1、2迹工作转换为3、4迹工作。这样,一次自动换向切换动作结束、磁带开始了向另一个方向的运行。
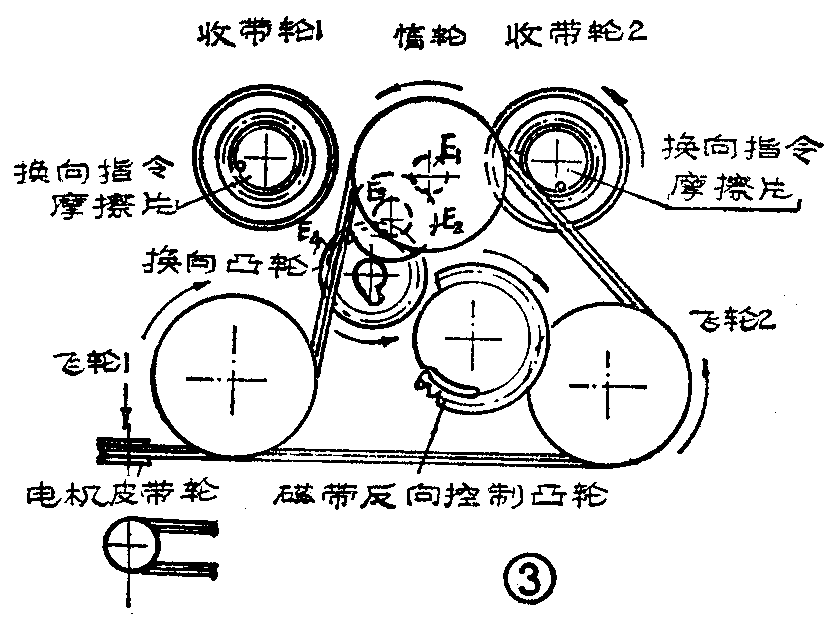
反转原理 为了说明在自动反转过程中,各换向机构是怎样动作的,有必要先介绍一下该机的传动系统,即各机构开始动作时它们的动力是怎样供给的。图3是该机芯传动原理图。只要将该机的任何一个功能键,即放音(PLAY)、快进(F·FWD)、快倒(REW)键按下,均能接通电机电源。在接通电源后,电机启动,电机上的皮带轮通过皮带带动飞轮Ⅰ、飞轮Ⅱ和惰轮转动。飞轮Ⅰ、飞轮Ⅱ旋转方向相反。惰轮作为控制机构的主动轮通过Z\(_{1}\)、Z2、Z\(_{3}\)和与换向凸轮同体的Z4,使换向凸轮保持转动。当磁带带终发出自动反转指令或发出手动反转指令后,磁带反向控制凸轮机构通过凸轮上的扇形齿轮同换向凸轮上的齿轮啮合旋转,磁带反向控制凸轮机构旋至第二定位点时,由定位机构定位,完成一个方向的换向动作。
收带轮机构除完成正常的收带以外,还用作发出自动换向指令。该机构由轮芯、弹簧、收带摩擦轮、毛毡圈、快进齿轮、换向指令摩擦片、弹簧及收带轮轴组成,如图4所示。
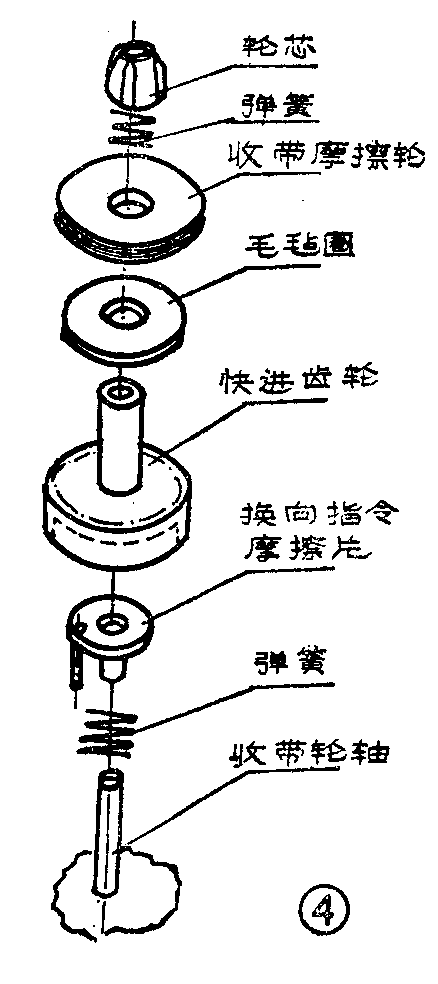
收带轮机构在正常放音状态下,以4.76cm/s的恒定线速度收带或供带。为了保证对磁带不产生过强的拉力,在摩擦轮和毛毡圈之间产生一种摩擦传递力矩,此力矩一般控制在30~50gcm之间。因此,换向指令摩擦片在弹簧的作用下(如图4所示),紧贴在快进齿轮内端面,在摩擦力的作用下以收带速度转动。但由于受到换向凸轮轨迹的限制,见图5,自动换向杠杆直接控制指令摩擦片在小范围内作摆动。前进时靠快进齿轮内端摩擦带动,同时又拨动自动换向杠杆一起运动,当摆至换向凸轮允许的最大行程时,指令摩擦片停止摆动此时换向凸轮又通过自动换向杠杆再将指令摩擦片拨回至初始位置。在放音状态下,换向凸轮和指令摩擦片分别作为主动轮进行运动,它们之间即互相依托又互相限制。自动换向杠杆在两个方面的限制下作往复摆动,换向指令摩擦片也有规律地作往复摆动。每当放音磁带终了时,由于收带轮受到磁带的牵引作用,收带摩擦轮只能空转。其它零件在磁带的作用下不再转动。换向指令摩擦片也随之静止不动。此时自动换向杠杆也即停止了摆动。这一系列变化破坏了各机构的正常运转规律,自动换向杆因失去了来自指令摩擦片的作用,而处于半自由状态。该机构正是利用这种变化发出自动换向的指令信号。
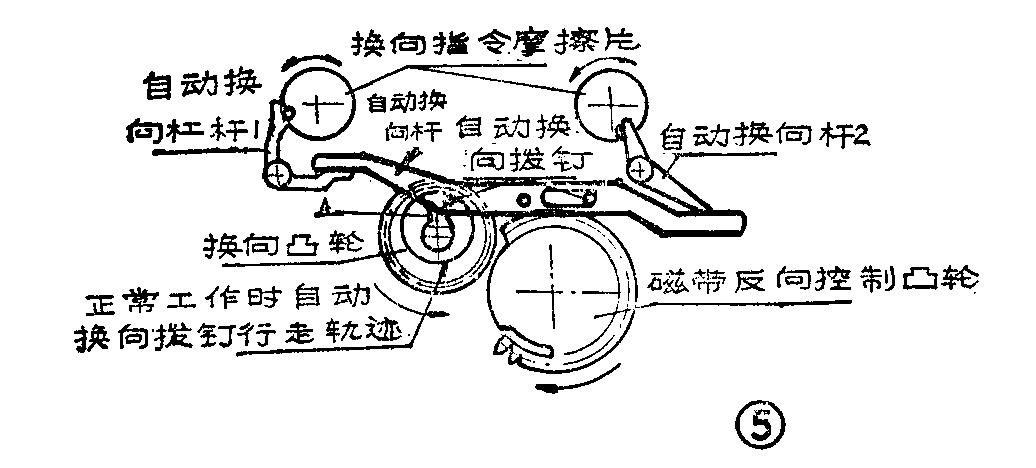
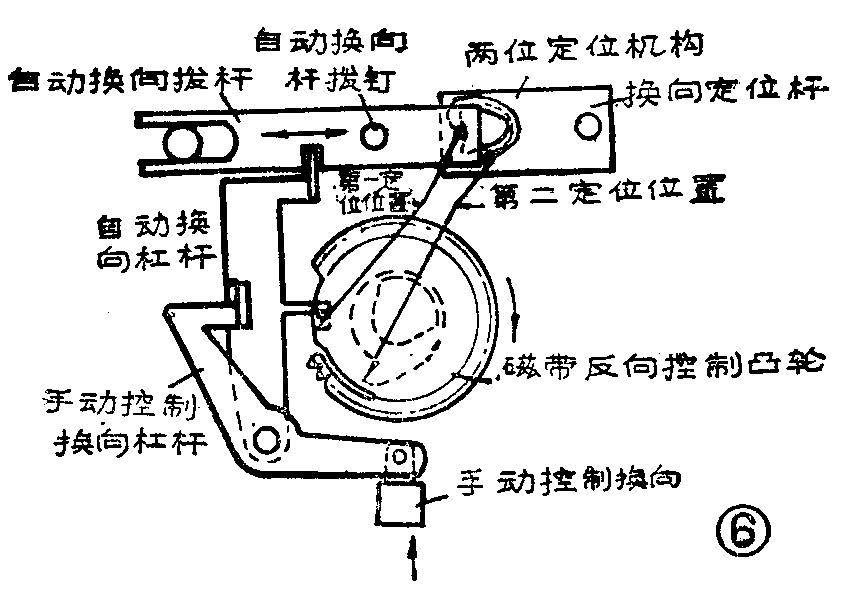
换向凸轮机构的作用主要是接受来自自动换向指令发出机构的机械信号。该机构由自动换向杠杆1和2、自动换向杆、换向凸轮组成,如图5所示。换向凸轮机构在正常放音情况下同自动换向指令发出机构配合运动。当磁带放音终了时,自动换向指令发出机构不再同换向凸轮机构配合运动。由此导致自动换向杠杆1和2停止摆动。此时自动换向杆处于半自由状态。自动换向杆上的拨钉仍在换向凸轮的作用下处在距凸轮中心为r的位置上。由于凸轮仍在旋转,自动换向杆上的拨钉不再按照换向凸轮内轮迹行走。此时在凸轮内的另一个偏心凸轮A处拨住拨钉,并带动自动换向杆向前移动一段距离。换向杆带动图6中的换向定位杆也向前移动一段距离。此时换向凸轮机构完成了接受信号和发出信号的任务。自动换向杆带动换向定位杆运动(如图6所示),在换向定位杆运动的过程中,由第一定位位置进入第二定位位置并定位。磁带反向控制凸轮也随之由第一定位位置进入第二定位位置。其它定位原理完全类似于普通录音机的暂停机构。当该机处于第一定位位置时,收带轮Ⅰ,压带轮Ⅰ工作,处于第二定位位置时,收带轮Ⅱ,压带轮Ⅱ工作,不工作的收带轮、压带轮分别处于暂停状态和供带状态。
在磁带反向控制机构的反向控制凸轮上,有两个工作位置见图7。即磁带向右走带工作位置,磁带向左走带位置。
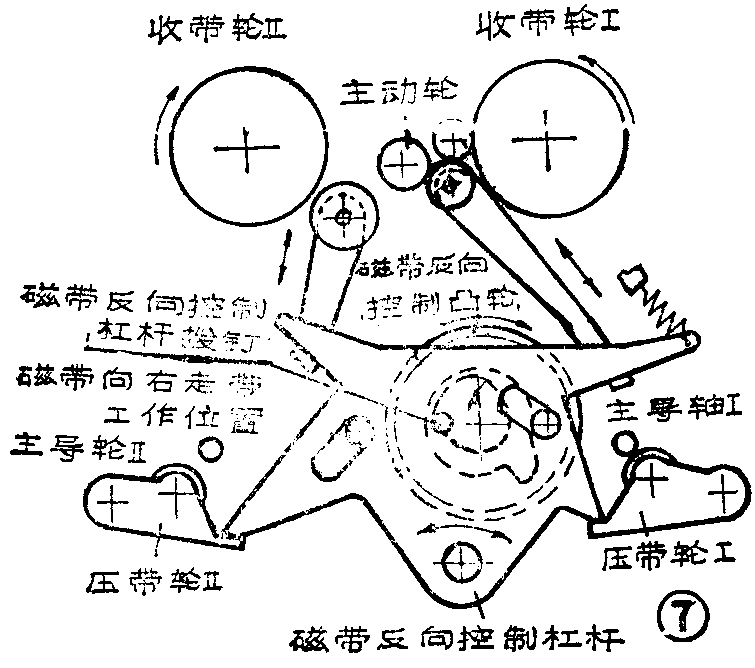
当向右走带放音终了时或手动控制反转时,定位机构控制的自动换向杠杆退出定位位置(图6)。磁带反向控制凸轮上的扇形齿同换向凸轮啮合转动,转动的同时带动磁带反向控制杠杆上的拨钉连同磁带反向控杠杆一起运动,磁带反向控制杠杆拨钉同磁带反向控制凸轮上A点处重合时(见图7),磁带反向控制凸轮进入第二定位位置。磁带反向控制杠杆在凸轮的作用下推开压带轮Ⅰ和收带轮Ⅰ,同时供压带轮Ⅱ和收带轮Ⅱ进入工作状态,磁带开始向左行走。由第二位置进入第一工作位置时,磁带反向控制杠杆在弹簧的工作下恢复至图7所示位置,磁带反向控制凸轮也旋转一个角度,至第一定位位置并定位,完成磁带反向控制并遵循这个规律循环下去。(刘传宝 刘胜利)