驱动唱盘的电动机,要求其功率大、噪声低、转速可控性好。在这几个方面,直流电动机的性能比交流电动机优越。但是,直流电动机也有其不足之处:电刷易于磨损,影响寿命,降低了产品的可靠性。因此,近代质量要求较高的电唱盘,均倾向于采用无刷直流电动机来驱动。
要实现直流电动机的无刷化,主要有以下几种方法:1.用霍尔元件做位置传感器,2.用光电元件做传感器,3.用高频感应方式。在这几种方法中,由于霍尔元件制成的传感器耗电省、寿命长(半永久性)、可靠性高,故近年来驱动唱盘的无刷直流电动机,多采用霍尔元件作为传感器。
霍尔马达是怎样工作的
使用霍尔元件做传感器的无刷直流电动机,常简称为霍尔马达。霍尔元件实际上是一种磁电变换元件,常用铟、锑等半导体材料制成。将这类半导体材料做成薄膜片状元件,从元件一侧预先注入电流,如果在与薄膜垂直的方向有磁场存在,则在薄膜元件的另一侧将产生电压,如图1所示。
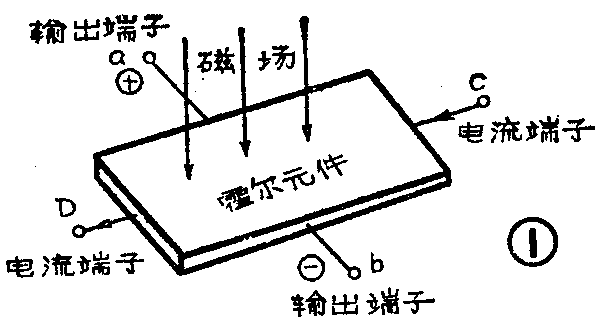
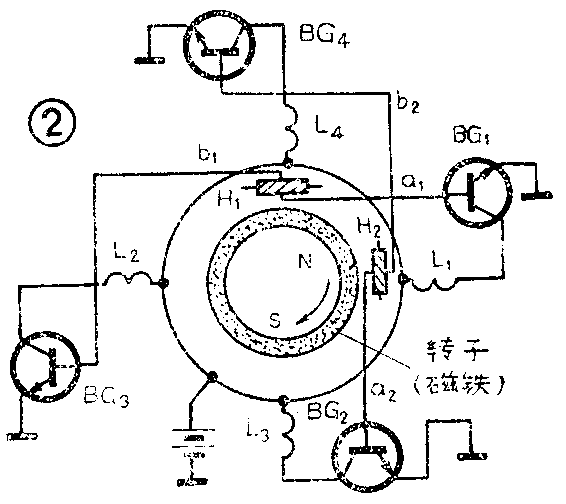
图2是霍尔马达的原理简图。其中H\(_{1}\)、H2是霍尔元件,BG\(_{1}\)~BG4为NPN型功率晶体管,L\(_{1}\)~L4是四个定子线圈,中间的磁铁是转子。当转子的N极与霍尔元件H\(_{1}\)相对时,H1的a\(_{1}\)侧产生正的输出电压,这个电压经放大后使BG1导通,L\(_{1}\)有电流流过,由线圈L1电流和转子磁铁相互作用产生的电磁力,驱动转子按箭头方向旋转。转子旋转90°以后,霍尔元件H\(_{2}\)和磁铁的N极相对,H2的a\(_{2}\)侧产生正电压,该电压经放大后使BG2导通,L\(_{3}\)有电流流通,转子受力继续按箭头方向旋转。转子旋转180°以后,H1和磁铁的S极相对应,H\(_{1}\)的b1侧产生正电压,该电压经放大使BG\(_{3}\)导通,L2有电流流通,转子受力继续旋转。转子旋转270°以后,H\(_{2}\)和磁铁的S极相对,H2的b\(_{2}\)侧产生正电压,该电压经放大后使BG4导通,L\(_{4}\)中有电流流过,L4和磁铁相互作用产生的磁力,使转子继续按原方向旋转。以上过程不断循环,使转子持续转动。
山水DA—P550霍尔马达工作原理
北京市广播技术研究所与日本山水电气株式会社合作生产的DA—P550电唱盘采用的便是直接驱动的霍尔马达,其结构如图3所示,DA—P550所用的霍尔马达,磁铁转子的外径为70mm,内径为32mm,厚度为8mm,材料为铁氧体。转子由8个磁极组成,由这8个磁极与定子线圈配合,产生转子转动所需的力矩。使用8个磁极为的是使转动更平稳,出力更大,原理同上述。在8个主磁极之外,均匀排布有180个小磁极,它们和测速线圈配合,产生测速脉冲。在转子下面,水平排布着四个定子线圈。图4是霍尔马达的原理框图。测速线圈检测到的脉冲信号经放大、整形、频率电压变换后和霍尔位置传感器输出的信号一起送到驱动电路,控制马达转子匀速旋转。
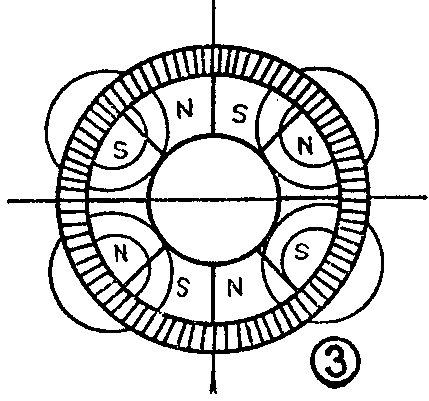
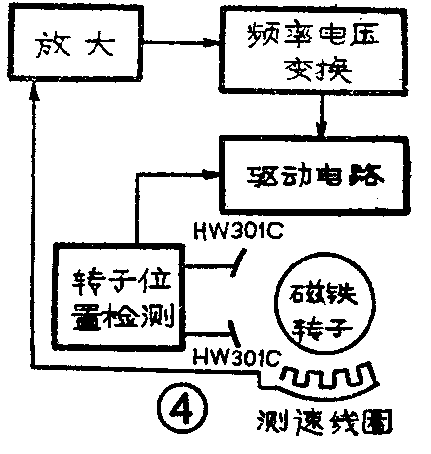
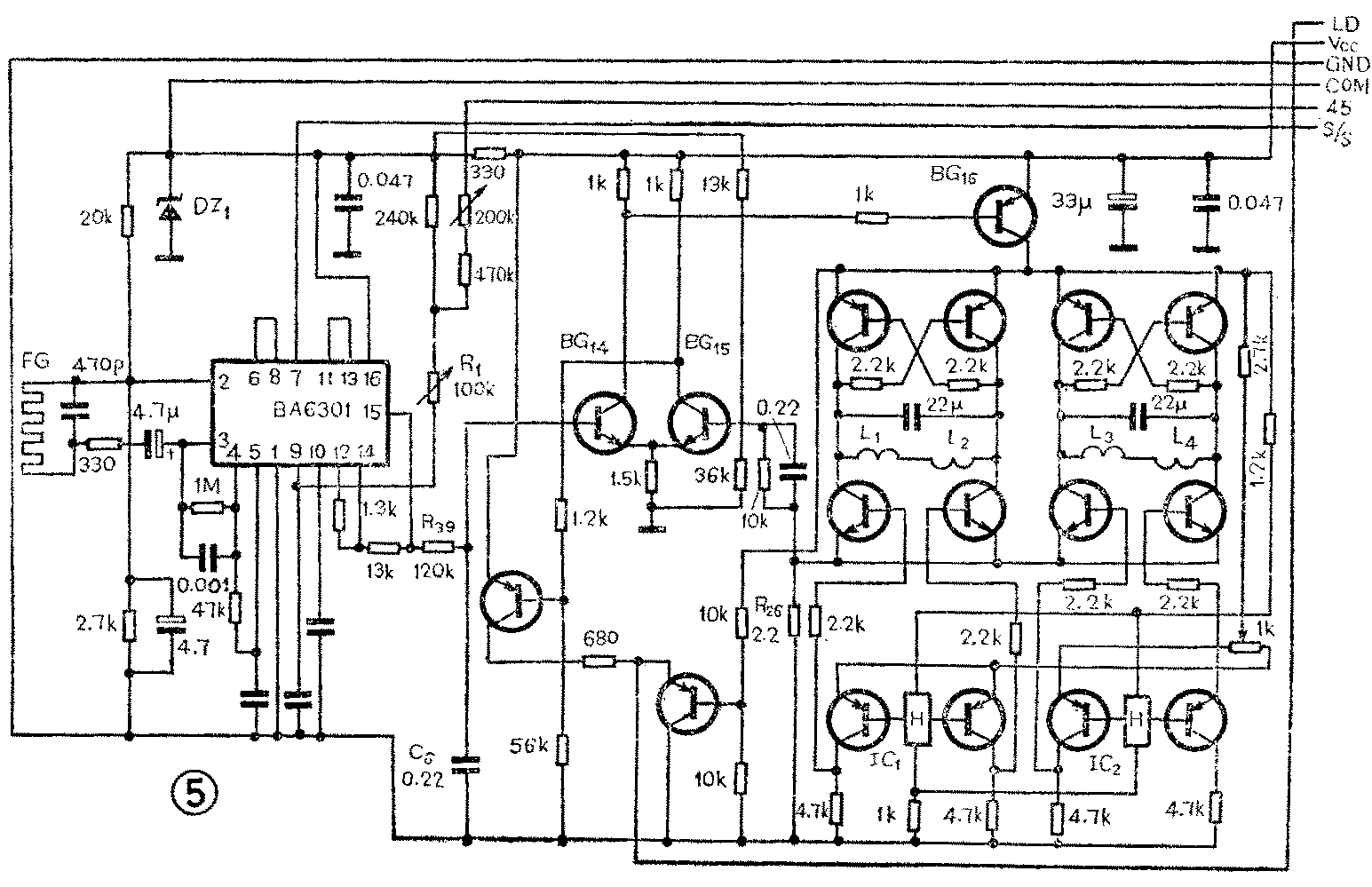
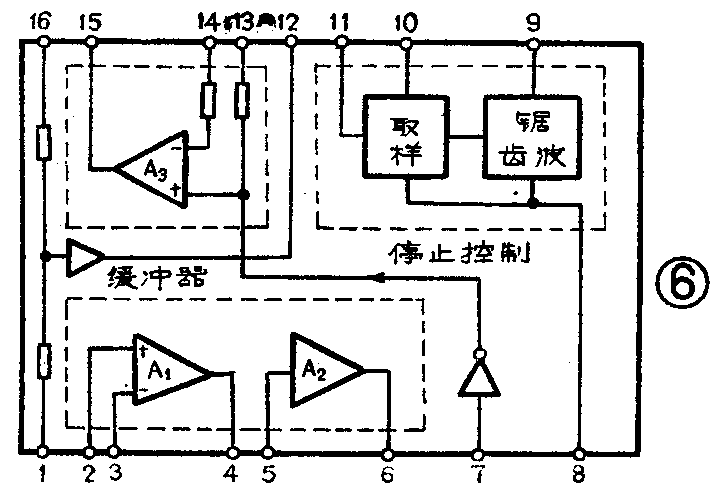
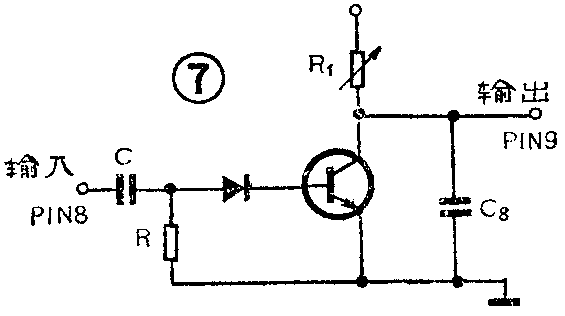
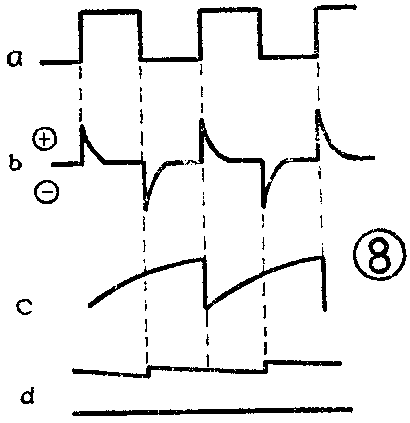
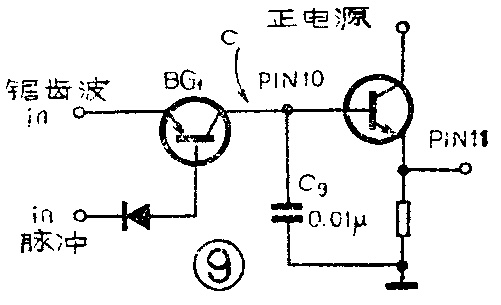
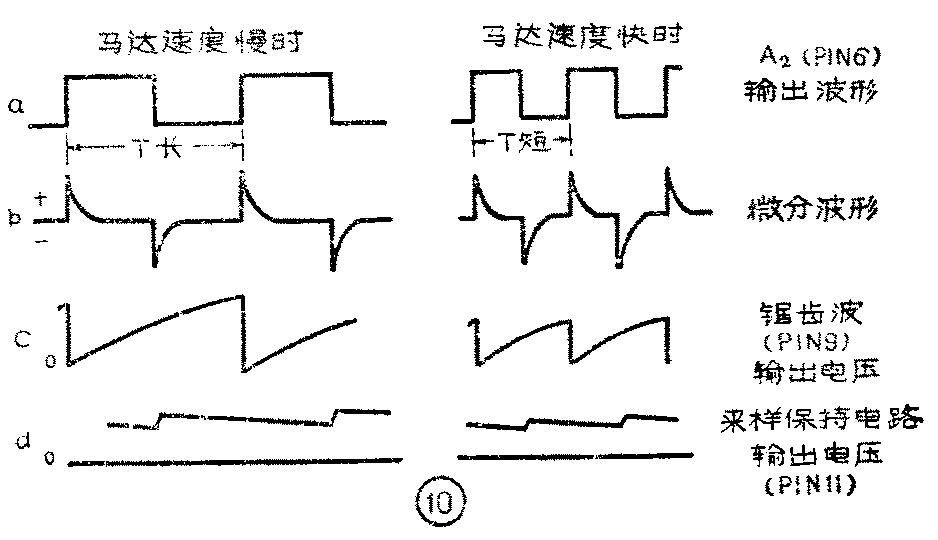
图5是DA—P550霍尔马达的电路原理图。其中关键器件BA6301的内部结构示于图6。测速线圈输出的2~5mV峰—峰值正弦信号先从BA6301的2、3两脚送入BA6301的A\(_{1}\)进行放大,放大后的信号从第4脚输出,再从第5脚送入A2整形,从第6脚输出矩形脉冲。该矩形脉冲送入BA6301的第8脚,加到集成块内部的锯齿波发生器和采样保持电路。下面详细地分析一下这两部分电路的工作原理:图7是锯齿波形成电路的原理简图。它的输入端加上如图8a所示的矩形脉冲,该脉冲经C、R微分后,变成如图8b所示尖脉冲,经二极管整流切掉负脉冲,加到三极管的基极。正脉冲没到时,三极管不导通,电容器C\(_{8}\)通过R1被充电。正脉冲到来时,三极管导通,C\(_{8}\)迅速放电,形成了图8C所示的锯齿波形。这一信号紧接着送到图9所示的采样保持电路。图8b所示的尖脉冲,经二极管整流,切掉正脉冲,加到BG1的基极,作为采样保持电路的控制信号。负脉冲到来时,BG\(_{1}\)导通,C9被充电到锯齿波的峰值。由于C\(_{9}\)后连接的是高输入阻抗的电路,所以放电较慢,每次负脉冲到来,C9都被充电到锯齿波的峰值,而后再缓慢放电,形成图8d波形。通过以上分析,再结合图10,我们可以看出:采样保持电路输出的电压平均值,是随马达转速变化的,马达转速高时这个电压低,转速低时这个电压高。
采样保持电路的输出从13脚送到直流放大器A\(_{3}\),在A3中放大3倍左右,从第15脚输出。15脚接有R\(_{39}\)、C6组成的低通滤波器,滤去输出电压中的脉动成份。经过放大和滤波的电压称随动电压,它的大小反映着转速的高低。
BG\(_{14}\)和BG15组成一差分放大器,其中BG\(_{14}\)的基极接的是BA6301第15脚输出的随动电压,BG15的基极电位,则由R26等组成的负反馈电路提供,其负反馈过程如下:马达主线圈L\(_{1}\)~L4的电流都要流经R\(_{26}\),一旦主线圈中的电流上升,R26中的电流也上升,V\(_{R26}\)增大,BG15的基极电位提高,BG\(_{14}\)集电极电位也上升,BG16趋于截止,集射极间电流减小,L\(_{1}\)~L4中电流相应地下降。在电路中,BG\(_{16}\)的作用相当于一只可变电阻,它集射极间的阻抗随基极电位而变,只要改变BG16的基极电位,就可以调节驱动电路的供电电流,从而控制马达的转速。
马达静止时,BA6301第15脚的随动电压高BG\(_{14}\)趋于饱和,BG16基极电位低,BG\(_{16}\)的集射阻抗最小,驱动电路中有最大电流,马达全速启动。当马达超过指定转速时BG14基极电位低于BG15基极电位,这时BG\(_{14}\)、BG16均趋于截止,驱动电路中电流减小,马达转速下降。如此不断循环,使速度稳定。(章纪松)