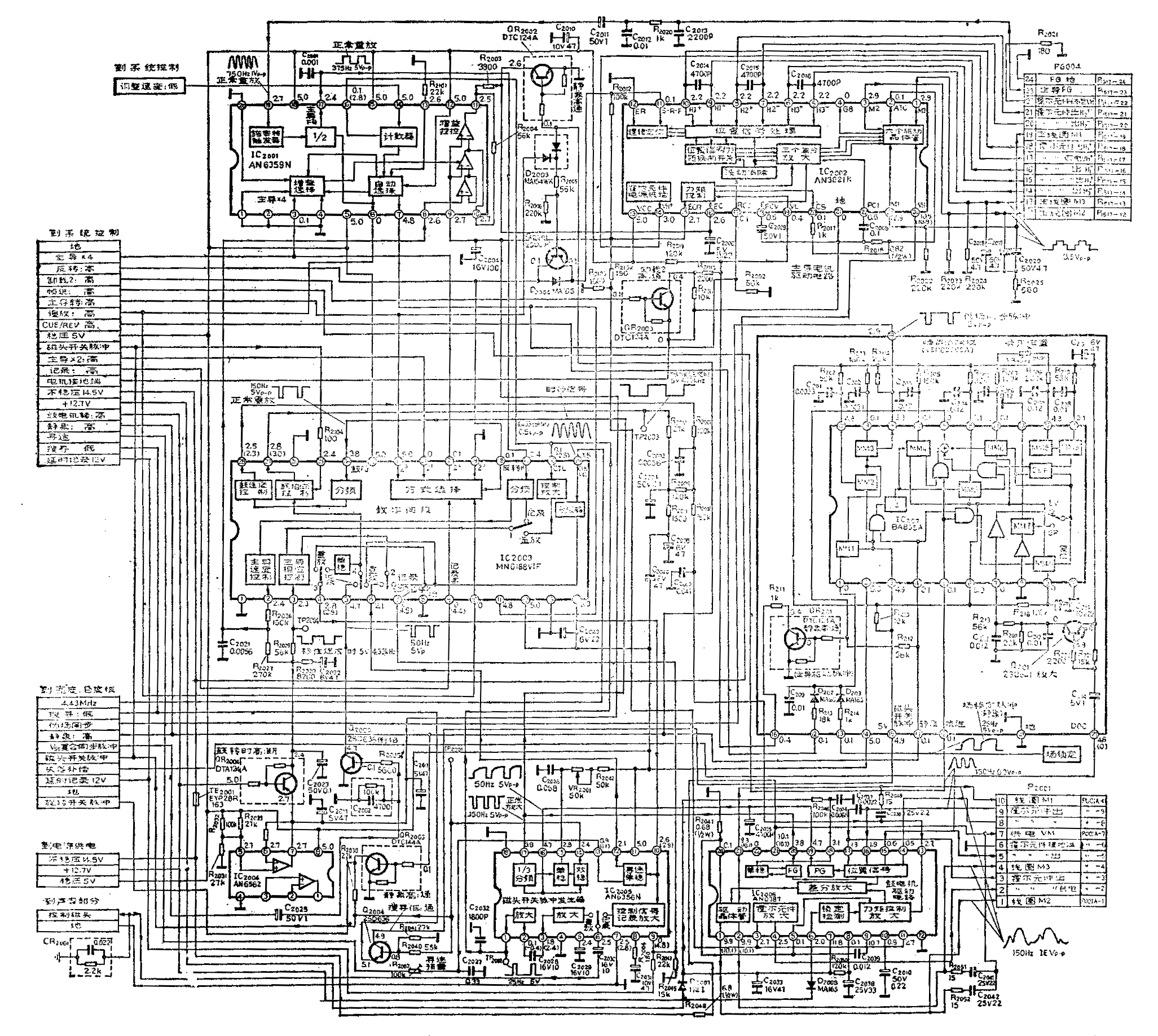
NV—450MC录象机的伺服系统由主导伺服和鼓伺服两部分组成,附图示出该伺服系统的实际电路。这两个伺服电路都有速度控制环路和相位控制环路,其作用是使主导电机和鼓电机的转速稳定。下边详细介绍这两个伺服电路的工作过程。
主导伺服系统
主导伺服系统的作用是保证主导电机转动平稳而使视频磁带的运行速度精确为23.39mm/秒,在记录状态时其相位由亮度、色度板来的4.43MHz时钟信号锁定;在重放状态时其相位由控制磁头上拾取的控制脉冲锁定。请看附图电路,主导伺服电路由集成电路IC\(_{2}\)001、IC2002及IC\(_{2}\)003的部分电路组成,下边作具体介绍。
1.主导电机驱动电路:NV—450MC录象机的主导电机是采用直接驱动无刷直流电机,电机由主导轴、定子、转子和三个霍尔元件组成,机内有三个主线圈(共六个绕组)。集成电路IC\(_{2}\)002及外围元件组成主导电机驱动电路,从图看见IC2002内部的六个驱动晶体管通过1、3、23脚及插头P\(_{6}\)004的端子12、13、19顺序地给电机三个主线圈中的两个提供电流。由主导伺服电路来的误差直流电压从IC2002的16脚输入,加到力矩控制电路,同时一个参考电压也从15脚输入加到这个电路。力矩控制电路的输出加到差分放大器,用来控制六个驱动晶体管的电流(即电机主线圈电流)大小,从而控制主导电机的转速,当这个电流大时转速快,电流小时转速慢。电机上三个霍尔元件产生的电磁感应电压经过插头P\(_{6}\)004的端子14、15、16、18、20、21与IC2002的5~10脚加到位置信号处理电路,决定在某一时刻给三个主线圈中的哪两个提供电流。2脚的外接电阻R\(_{2}\)018是电流负反馈电阻,六个驱动晶体管的电流都经过这个电阻,所产生的负反馈电压从20脚输入又加到力矩控制电路使流过三个主线圈的电流相等。R2018(0.82Ω,1/2W)是易熔电阻,当因某种原因熔断时不能用普通电阻代替,可用国产易熔保险丝代替。
2.主导伺服电路工作过程
(1)录象机在记录状态时:从插头P\(_{6}\)004的端子23来的由主导电机产生的FG(频率发生器)信号(由主导电机转动产生,其频率与电机转速成比例),正常时频率为750Hz,峰峰值为0.5V。由IC2001的19脚输入,经施密特触发器整形和1/2分频后变成375Hz(峰值5V)的脉冲信号,从17脚送出再加到IC\(_{2}\)003的17脚。经它内部分频器变成25Hz脉冲信号再加到主导速度控制电路,在与该电路相接的2脚产生速度伺服误差电压,频率为17.319kHz,峰峰值为5V。当主导电机的转速为标准速度时误差电压为对称方波信号,经由C2021和R\(_{2}\)026组成的低通滤波器将方波脉冲信号变成相应的直流误差电压约为2.5伏。
IC\(_{2}\)003内部的主导相位控制电路有两个输入信号,一个是经IC2003内的录/放开关1(记录位置)加入的主导FG信号(25Hz);另一个由15脚加入的4.43MHz时钟信号经分频后得到的25Hz信号,经录/放开关2(记录位置)加入。主导相位控制电路比较这两个输入信号的相位,当无相位差时在3脚输出对称的方波脉冲信号,频率为4.33kHz,幅度为5V(峰值)。然后由R\(_{2}\)029、R2030和C\(_{2}\)022组成的低通滤波器变成直流误差电压(约2.5V),通过R2027与上述主导速度控制电路输出的直流误差电压(2.5V)一起送到IC\(_{2}\)001的8脚,经增益控制电路之后又从11脚送出经R2003加到IC\(_{2}\)002的16脚,经主导驱动电路的作用使主导电机以标准速度旋转。
当主导电机的转速比标准速度变快时,IC\(_{2}\)003的2、3脚输出的速度和相位误差信号的脉冲,正极性比负极性宽则经过滤波后送到IC2002的16脚直流误差电压增加,结果使六个晶体管驱动电流减小而使主导电机速度变慢。当主导电机速度变慢时则电路以相反的控制使主导电机速度变快,因此主导电机在主导伺服电路的作用下始终保持稳定的速度。
(2)录象机在重放状态时:由控制磁头拾取磁带上控制磁迹信号,经C\(_{2}\)030加到IC2005的6脚,通过录/放开关(重放)和两级放大后从1脚送出脉冲信号(25Hz、峰值为5V),又从IC\(_{2}\)003的16脚输入加到控制放大器放大到足够的幅度之后,经录/放开关1(重放)加到主导相位控制电路作比较信号。基准信号是IC2003的15脚加入的4.43MHz时钟信号,这个信号经分频电路变为25Hz方波信号经录/放开关3(重放)从4脚送出加到IC\(_{2}\)005的10脚相连接的寻迹单稳电路,接在13脚的寻迹预置电位器VR2002用来改变寻迹单稳的时间常数。寻迹单稳的输出从12脚送出又从IC\(_{2}\)003的6脚输入,经录/放开关2(重放)加到主导相位控制电路。主导相位控制电路比较这两个信号的相位并从3脚送出相位误差电压。其控制过程同上述记录期间完全一样不再重复。
3.录象机在其它工作期间的工作情况
(1)搜寻:为了在节目磁带中迅速查找到所需要的内容,录象机设置了快速搜寻功能。当录象机工作在搜寻时,主导电机以正常重放时的4倍速度转动。从系统控制电路送来的主导×4的高电位分别加到IC\(_{2}\)001的3脚和IC2002的17脚。IC\(_{2}\)001内部增益选择电路收到从3脚送来的主导×4的高电位之后,送出相应的电压给增益控制电路,使11脚输出的直流电压送到主导电机驱动电路去控制主导电机以4倍正常速度转动。因走带速度为正常速度的整数倍,故能观察到快速搜寻时的画面。从IC2002的17脚输入的主导×4的高电位加到波动消除电路,用来消除在搜寻时主导电机转速加快而带来的抖晃。主导电机转速及方向的改变都是由系统控制电路来的控制信号决定的,这些信号分别加到IC\(_{2}\)003的18、20、21、22脚,通过方式选择电路改变伺服电路中误差数据的内容,使主导电机按所要求的工作方式改变转速或方向。
(2)静象:录象机在静象工作时可以观看静止画面,此时从控制电路来的静象高电位分别加到QR\(_{2}\)005和QR2002的基极及噪声消除板的17脚。QR\(_{2}\)005导通使送到亮度、色度板的旋转开关脉冲在静象期间保持地电位。QR2002导通使IC\(_{2}\)002的16脚在静象期间为地电位,通过主导电机驱动电路作用使主导电机停止转动。加到噪声消除板的17脚的高电位使QR201导通,使它的16脚为地电位又经IC\(_{2}\)002的19脚加到力矩控制电路,确保主导电机停转。此时完全停止走带,而磁头鼓仍然旋转,它只扫描同一条视频磁迹,这样就产生静止不动的画面。当静止图象出现噪声带时,可以适当调节噪声消除板上VR2004噪声位置电位器,使静象噪声带移到场消隐期间。
(3)卸载:在卸载期间主导电机先停转然后再反转,使磁带收回到带盒内。该期间称为卸载2期间,从系统控制电路来的卸载2高电位使QR\(_{2}\)003瞬间导通,使主导电机驱动电路的IC2002的19脚为低电位,通过驱动电路的作用使主导电机停转。然后从控制电路来的反转高电位加到IC\(_{2}\)002的11脚经逻辑定位电路和位置信号力矩换向开关电路使主导电机反转。
鼓伺服系统
鼓伺服系统的作用是保证鼓电机的转速为1500转/分,在记录期间相位由所记录的视频信号中的场同步脉冲锁定;在重放期间其相位由亮度、色度板来的4.43MHz时钟信号锁定。鼓伺服主要由集成电路IC\(_{2}\)005、IC2006和IC\(_{2}\)003的部分电路来完成,下边具体介绍。
1.鼓电机驱动电路:磁头鼓电机也是采用直接驱动无刷直流电机,它是由定子、鼓飞轮、三个主线圈和二个霍尔元件组成。集成电路IC\(_{2}\)006及外围元件组成鼓电机驱动电路,内部驱动晶体管通过1、2、23脚及插头P2001的端子1、4、10分别给三个主线圈提供电流,三个主线圈交替工作其电流相位相互差120°。三个主线圈电流都流经负反馈电阻R\(_{2}\)047,产生的负反馈电压从5脚输入加到力矩控制放大电路,通过该电路的控制使流经三个主线圈的电流相等。鼓伺服电路来的误差直流电压由13脚输入,经力矩控制放大电路及差分放大器去控制驱动晶体管电流(即电机主线圈电流)的大小,电流愈大电机速度愈快。霍尔元件产生的感应电压通过插头P2001的端子3、5、8、9与IC\(_{2}\)006的14、15、16、17脚加到位置信号处理电路,该电路的输出去控制差分放大器的工作状态,决定在某一时刻应当给那个驱动晶体管提供电流。另外这个电路的输出信号还加到FG电路和PG电路,这两个电路从19脚和20脚分别送出PG信号(25Hz)和FG信号(150Hz),FG信号送到IC2005的17脚而PG信号送到IC\(_{2}\)005的16脚,用来产生磁头开关信号脉冲。
2.鼓伺服电路工作过程
(1)磁头开关脉冲的产生:IC\(_{2}\)005的17脚输入的FG信号(150Hz)加到磁头开关脉冲发生器的\(\frac{1}{3}\)分频器,得到50Hz信号再加到单稳电路。单稳电路的时间常数由接在15脚的PG位移电位器VR2001来调节,当重放图象底部出现噪声带或有轻微跳动时,调节这个电位器用以消除磁头开关噪声。单稳态的输出加到双稳态电路,产生的磁头开关脉冲从14脚输出,一路送到亮度、色度电路而另一路送到Q\(_{2}\)004的基极。该管发射极受控制电路来的搜寻低电位控制,录象机在搜寻工作期间Q2004导通,磁头开关脉冲经Q\(_{2}\)004的集电极加到噪声消除板的15脚,使在搜寻期间噪声带位置固定而且使噪声带尽量变窄。
IC\(_{2}\)005的16脚输入的PG信号(25Hz)加到\(\frac{1}{3}\)分频电路和双稳电路,它作为这两部分电路的复位脉冲,每当PG脉冲到来时使磁头开关脉冲为负极性。这就确保了在磁头开关脉冲为负极性时为左磁头工作期间,磁头开关脉冲为正极性时为右磁头工作期间。另外从IC2005的14脚输出的磁头开关脉冲从IC\(_{2}\)003的25脚输入送到鼓相位控制电路和系统控制电路。
(2)鼓伺服电路的工作过程:在记录期间,从亮度、色度板来的复合同步脉冲(V\(_{SS}\))经Q2002倒相放大后加到IC\(_{2}\)003的5脚,经录/放开关4(记录)加到鼓相位控制电路作基准信号。从IC2003的25脚输入的磁头开关脉冲作鼓相位控制电路的比较信号。鼓相位控制电路比较这两个信号的相位,无相位差存在时从27脚送出对称方波信号(4.33kHz、峰值为5V),经过由R\(_{2}\)010和C2004组成的低通滤波器将方波信号变成直流误差电压;代表鼓电机转速的FG脉冲信号从IC\(_{2}\)006的20脚送出,经IC2003的24脚加到分频器将150Hz的FG信号变成25Hz信号,然后送到鼓速度控制电路,从28脚送出鼓速度控制电路产生的速度误差信号电压,在鼓电机的转速精确为1500转/分时输出17.318kHz、峰值为5V的对称方波信号,然后经由R\(_{2}\)007和C2002组成的低通滤波器将对称方波信号变成直流误差电压。再经R\(_{2}\)009与鼓相位控制电路来的直流误差电压混合后加到鼓电机驱动电路IC2006的13脚,通过该电路的作用使鼓电机以正常速度运转。
当鼓电机的转速变快时,IC\(_{2}\)003的27脚和28脚输出的相位和速度误差信号的脉冲正极性部分大于负极性部分,因此经低通滤波器得到的直流误差电压增高,这个电压加到鼓电机驱动电路IC2006的力矩控制放大电路,使驱动晶体管电流减小,即电机主线圈电流减小则鼓电机转速变慢,当鼓电机转速变慢时,则以相反的控制使鼓电机转速加快。因此鼓电机在鼓伺服电路的作用下始终保持稳定的转速。
在重放期间,控制过程与记录期间相同。(葛慧英)