读者可能都见过一些无线电遥控车、船模型的表演吧,操纵者手拿发射机就可开动远离自己的车船模型,使其按照自己的意愿运动,如前进、停止、后退、左右转弯等,真是大吸引人了。若能自己动手装一套这样的遥控模型,那就更有意思了。本文介绍的四通道遥控集成电路,就能满足你的要求。
在无线电遥控模型中,通常采用两种控制方式。一种是开关控制方式,另一种是比例控制方式。开关控制方式是指发射机只能控制模型“动”或“不动”两种状态。以遥控小汽车模型为例,则只能使小汽车完成“直行”或“停止”的动作;或者完成“左满舵”或“右满舵”动作。而比例方式则不同,操纵者可以按照自己的意愿转动设在发射机上的操纵杆,小汽车模型则随着“方向盘”转动的方向和角度而成比例的向左或向右转动相应的角度,动作十分逼真。
本文介绍的这套装置,发射机部分采用了一块LM1871集成电路,接收机部分采用了一块LM1872集成电路,舵机部分用了一块SN76604集成电路。可同时传送四路遥控信号,其中两路为开关控制信号,两路为比例控制信号。由于使用了无线电遥控专用集成电路,外围元件很少,体积小,价格便宜,调试简便,很适合业余组装。
电路分析
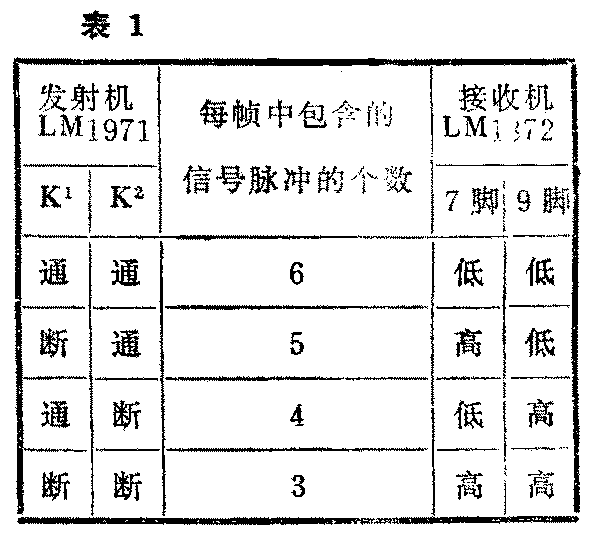
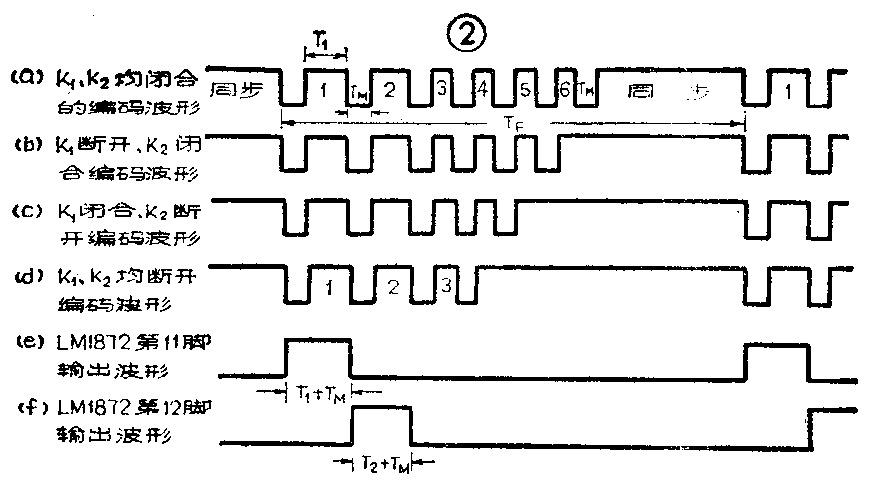
发射机部分 图1是发射机的电原理图。专用集成块LM1871的内部电路很复杂,本文不细讲了。总起来说,LM1871的内部功能可分为编码和高频发射两部分。接通发射机电源,编码器即连续产生如图2(a)~(d)所示的编码脉冲波形,其中包括同步脉冲和信号脉冲。前一个同步脉冲的下降沿到后一个同步脉冲的下降沿之间的时间间隔称为一“帧”,帧周期记作T\(_{F}\),TF的长短由LM1871的7脚外接电阻R\(_{4}\)和电容C7决定。按图1给出的数值,T\(_{F}\)约为20ms。图2(a)的编码脉冲波形中的第1~6个信号脉冲,依次对应着图1中LM1871的第1~6通道。每个脉冲的宽度由对应的各通道在LM1871上的引出脚与8脚之间的串联电阻及电容C8决定,记作T\(_{n}\)(n=1、2……6)。图1中LM1871的1、18、17、16四个引出脚(对应于第3~6通道)公用了固定电阻R2,所以信号中第3~6个脉冲的宽度相同,约0.5ms。LM1871的2、3脚(对应于第1、2通道)各外接了一只500K的电位器与R\(_{1}\)串联,调节电位器就可以使第1、2两个信号脉冲的宽度在0.5~2ms之间连续改变。这两个宽度可调的脉冲决定了接收机上的LM1872的11、12两脚的输出状态,用来传送两路比例控制信号。LM1871的15脚外接电阻R3,决定了信号脉冲的间歇时间,记作T\(_{m}\),约为0.2ms。LM1871的5脚和6脚各外接了一只开关K1、K\(_{2}\),其作用是决定接收机上的LM1872的7脚和9脚的输出状态,用来传送两路开关控制信号。这两个开关的启闭状态,决定第4~6个信号脉冲是否加入和有几个加入编码脉冲序列,见表1。当K1、K\(_{2}\)分别处于不同位置时,每帧编码脉冲中所包含的信号脉冲个数可在3~6个之间变化,参见图2(a)~(d)。
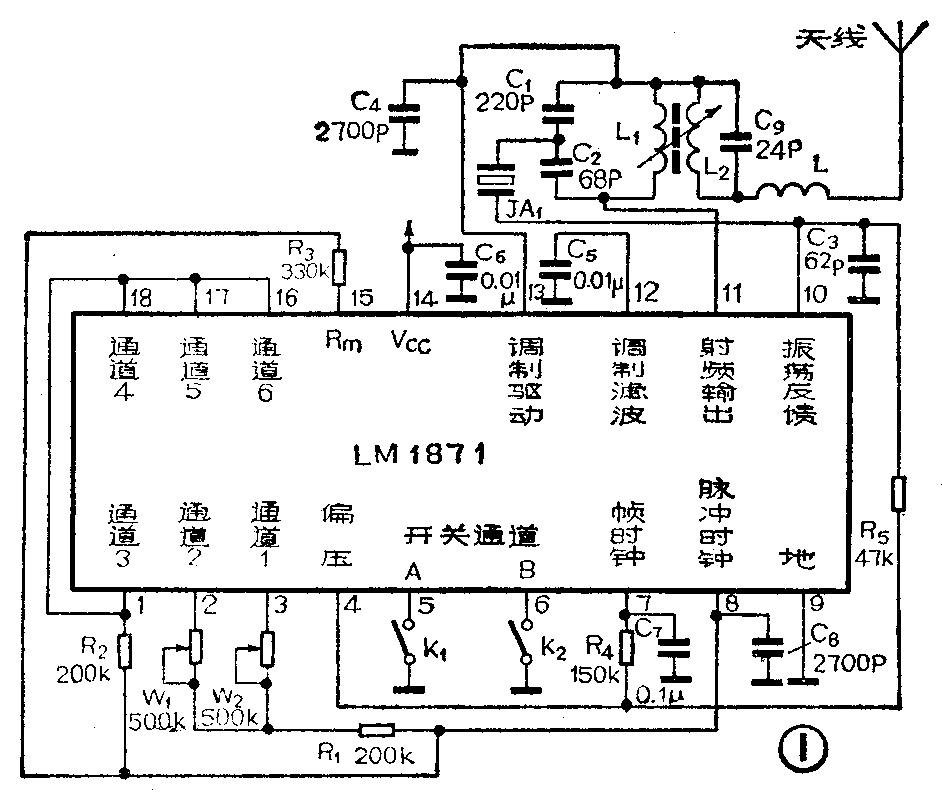
因为编码脉冲频率较低,必须通过一个高频电路进行调制后,才能以电磁波的形式由天线发射出去。高频发射部分电路见图3。图中虚线框内的电路是在集成块LM1871内部。
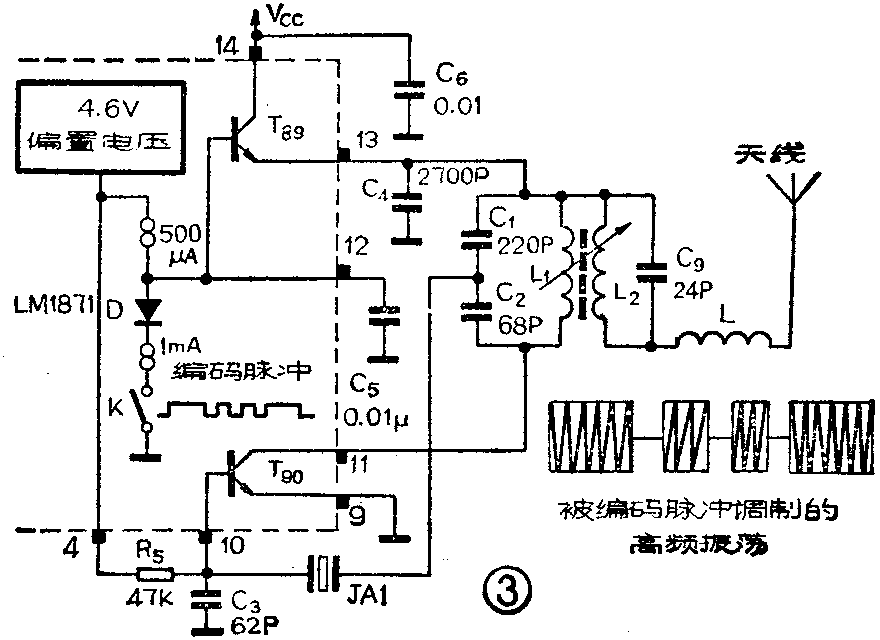
高频发射部分包括振荡电路和调制电路,由JA\(_{1}\)、T90、R\(_{5}\)、C1、C\(_{2}\)、C3、L\(_{1}\)等组成振荡电路,产生等幅高频振荡,其振荡频率由晶体JA1谐振频率决定。R\(_{5}\)为T90的基极偏置电阻。调制电路由LM1871内部的电子开关K(图3中K代表的是电子模拟开关、不是普通开关),500μA和1mA的两个恒流源,二极管D,三极管T\(_{89}\)组成。编码脉冲通过电子开关K控制T89的导通和截止,当编码脉冲高电平到来时,电子开关K断开,引起T\(_{8}\)0导通,于是将T90的集电极电源接通,振荡电路起振,通过天线发射出电磁波;当编码脉冲低电平到来时,K闭合,引起T\(_{89}\)截止,于是T90集电极相当于开路,振荡电路停振,天线不发射电磁波。这样,当一系列编码脉冲通过K、D送至T\(_{89}\)基极时,发射机天线就会不断的发射出被编码脉冲调制的电磁波。这种调制电路除了实现集电极调制的作用外,还能减小电源电压变化对振荡电路的影响。从图3中可以看出,由于LM1871内部的4.6伏恒压源在外部电源高于5伏时就可工作,那么只要电源电压高于5伏,T90的集电极电压始终由LM1871内部的4.6伏恒压源通过T\(_{89}\)来控制,与电源电压基本无关。这样,在很宽的电源电压变化范围(5~15伏),振荡器均可正常工作,这也是此电路的一个特点。
图3中,L\(_{2}\)和C9组成选频电路,当这个回路调谐至主振频率时,可以有效地减少谐波成分。电感L用于抵消天线上分布电容的影响。
接收机部分图4是接收机部分的电原理图。接收部分的功能可分为高频接收和译码输出两部分,其中绝大部分功能都设置在集成块LM1872内部。
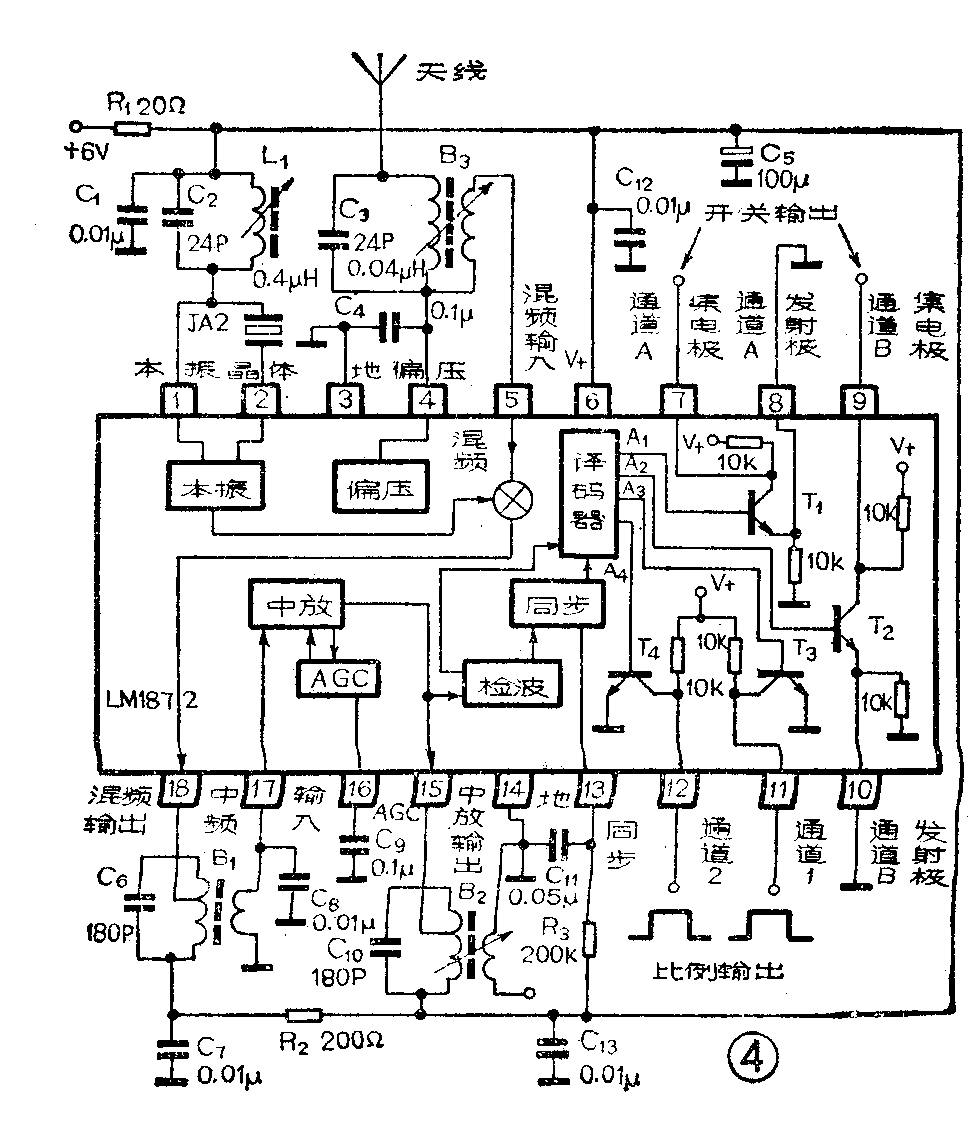
从接收机天线收到发射机发出的射频载波信号后,经B\(_{3}\)进入LM1872第5脚(混频输入端),经过混频、中放、检波各级后,送入译码器进行译码。
前面讲过,发射机发出的射频编码脉冲,包含了各种指令信号,如每帧脉冲中包含的信号脉冲个数的变化(开关控制信号),信号脉冲的宽度变化(比例控制信号)等。但接收机收到了这些指令信号后,还不能直接用于控制接收机各通道的输出状态,必须将这些指令信号进行处理,将其“翻译”成接收机各个通道所需要的控制信号,才能完成各通道的控制功能,这个过程就叫做“译码”。
开关通道的译码,就是将发射机发出的每帧编码脉冲中,包含的信号脉冲个数的变化,转换成LM1872内部译码器的输出端高低两种电平的变化形式(见表1),控制LM1872的各相应的开关通道输出电路的状态。例如,当图1中开关K\(_{1}\)、K2均断开时,每帧编码脉冲包含3个信号脉冲(见图2(d)),经过译码器译码后,LM1872的7脚和9脚两个开关通道A和B输出端均为高电平;当K\(_{1}\)接通, K2断开时,信号脉冲增加为4个(见图2(c)),译码后,7脚输出变为低电平,9脚为高电平;当K\(_{1}\)断开,K2接通时,信号脉冲增加为5个(见图2(b)),译码后,7脚为高电平,9脚为低电平。由此可见,通过发射机中K\(_{1}\)、K2启闭的四种状态,使得接收机的LM1872的7、9脚输出电平高低变化也对应四种状态,就象开关在接收机上控制一样,这样就可以实现开关控制功能。表1列出了K\(_{1}\)、K2处于不同位置时,LM1872的第7、9脚的电压变化情况。
前面讲过,发射机发出的每帧编码脉冲中的第1、2两个宽度可调的信号脉冲,做为接收机两个比例通道的指令信号。比例通道的译码过程,是在同步脉冲的同步控制作用下,将送入译码器的编码脉冲中的第1、2两个信号脉冲选择出来,去控制LM1872的两个比例通道(11、12脚)的输出状态,见图4。使得每帧编码脉冲经过译码器后,LM1872的11、12两脚各输出一个正脉冲(见图2(e)、(f)),其中11脚输出的正脉冲,宽度等于脉冲间歇时间T\(_{M}\)与第一个信号脉冲宽度T1之和。由于T\(_{M}\)不变,所以图2(e)的脉冲宽度只随T1变化。12脚输出的正脉冲,宽度等于T\(_{M}\)与第二个信号脉冲宽度T2之和。其余时间,11、12脚均输出低电平。
然而,LM1872的比例通道输出端的状态虽然反映了信号脉冲宽度变化的指令信号,但就图2(e)、(f)那样的波形还不能直接用于比例控制,还需要将这种脉冲做为控制脉冲,通过随动电路实现比例控制功能。其过程可理解为对图2(e)、(f)的脉冲进行第二次译码。为此,选用了SN76604舵机专用集成电路组成LM1872比例通道的随动电路,见图5。
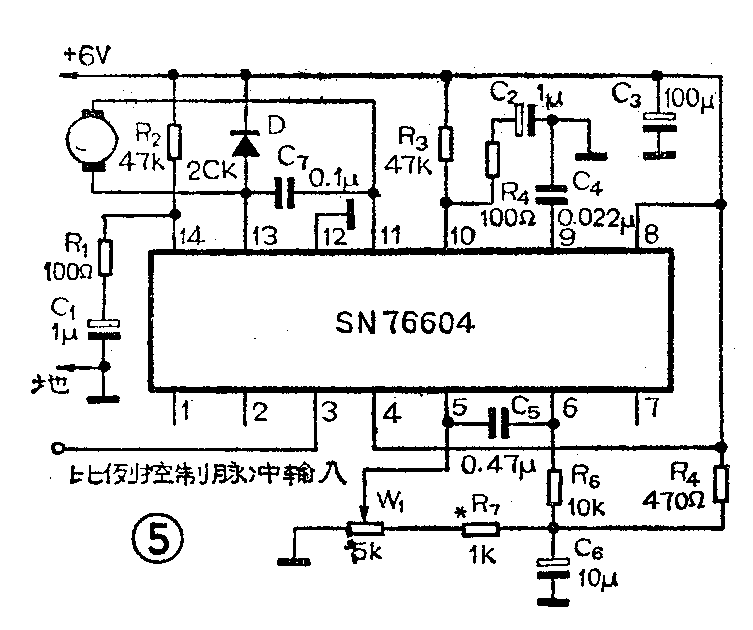
转动图1发射机中的电位器W\(_{1}\)和W2,图4接收机中LM1872的11或12脚输出的比例控制脉冲的宽度就会发生变化,送入图5中SN76604的3脚后,在11、13两脚间输出正或负的直流电压,其数值可随着控制脉冲宽度的变化,在+4.6伏~-4.6伏之间连续变化。该电压用来驱动舵机电机转动,同时经减速齿轮带动图5中的反馈电位器W\(_{1}\)转动,当11、13脚输出正电压时,舵机电机正转,电位器W1跟着转动,但通过SN76604内部作用恰恰使正电压逐渐减小;反之当11、13脚输出负电压时,舵机电机反转,电位器W\(_{1}\)的转动恰恰使输出负电压数值减小,最后输出电压变为零,于是舵机电机和W1停转。因此舵机转动的角度、速度和方向完全正比于发射机上相应的控制电位器W\(_{1}\)或W2转动的角度、速度和方向,并可连续改变,这就最终实现了比例控制。
LM1872的7脚和9脚两个开关通道,最大能输出100mA的直流电流,可以直接用于控制小型继电器。如果要驱动动力电机,必须加电流放大电路,图6给出两种输出电流放大电路。适当选择功率三极管,输出电流可大于1安培。图6(a)电路可驱动电机作正向、反向或停止转动动作。R\(_{S}\)、C1及C\(_{2}\)组成π型滤波电路,用以消除干扰。如果用这个电路驱动一辆小汽车模型的动力电机,同时用接收机的一路比例通道与SN76604配合驱动转向电机,就可以使小汽车按操纵者的意愿作前进、停止、倒退、向左或向右任意角度的转弯等各种动作。此例中,仅用了一路比例控制通道,两路开关控制通道。
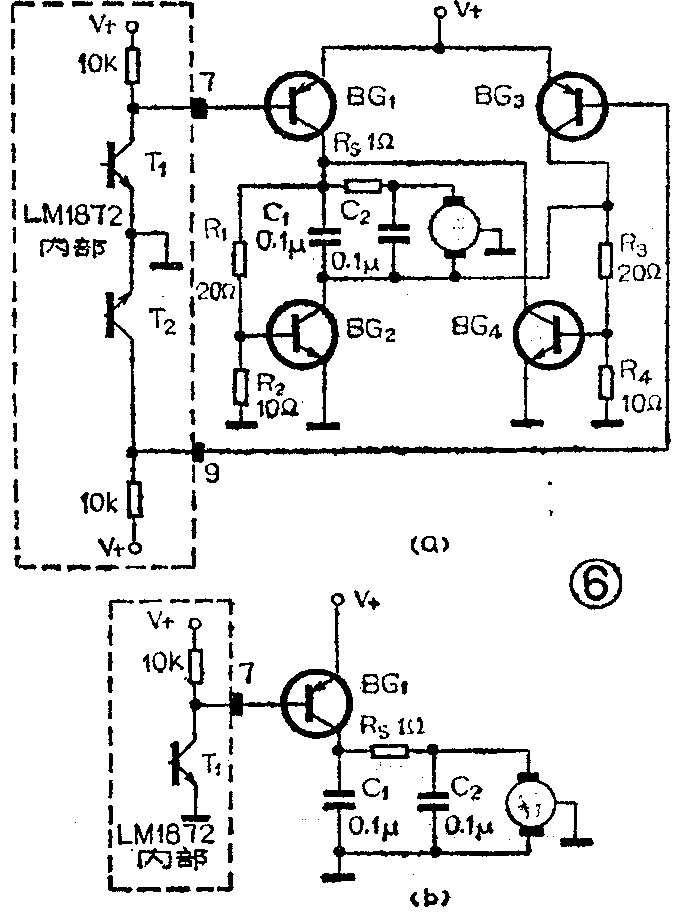
图6(b)的电路接法,可以驱动电机正转或停止。假如按此种接法,在LM1872的9脚再接入一个完全相同的电路,用两个开关通道来控制一个小坦克模型的两边履带。当两个电机同时正转时,小坦克直行;电机停转,小坦克停止;当右边电机停转,左边电机转动时,坦克右转弯;相反坦克左转弯。同时,可用LM1872的一路比例通道与SN76604配合驱动舵机电机,控制坦克炮塔转动,这就可以制成一个灵活有趣的坦克模型了。此例中也用了一路比例通道,两路开关通道。当然读者也可以自行设计,将两路比例通道和两路开关通道都利用上,来控制模型。
小汽车和小坦克的外壳可利用市售的玩具改制,减速箱可利用市售成品,也可用旧钟表齿轮或小型塑料齿轮改制。
读者看了图1后可能会问:通道3~6有什么用途?本文只介绍了LM1871的基本接法,实际上它还有许多其它接法。读者可根据需要使用3~6通道,将电路改成四路比例控制。此外还可以实现四路开关控制或一个发射机同时控制四个比例接收机等,这里就不介绍了。
SN76604的输出电流为120mA,选择舵机电机时应尽量选用工作电流为100mA的小型电机。这里介绍一种用131型玩具电机改制的方法:先将131型电机外壳拆开,把原来的线圈拆去,在每极上用0.8或0.9mm的漆包线绕270~290圈,各极绕数应相同。绕好后装上外壳,接上三节电池测试,电流如在90~100mA左右即可使用。
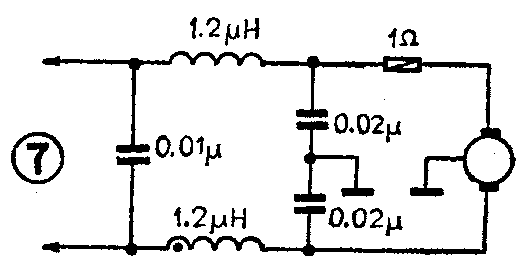
一般玩具电机电刷都是金属制成的,当电机转动时,会产生很强的火花干扰,而且干扰电磁波的频带很宽,可达上百兆赫。由于本电路工作在49MHz频段,这样的火花干扰会严重影响接收机的工作,使控制距离大大减小甚至失控。图7给出了一个抗火花干扰的电路,经实验效果很明显。
元件选择及电路调试
电路中的电阻选用1/8W的碳膜电阻。高频部分需用高频瓷片电容,其它部分选用涤纶电容或低频瓷片电容。石英晶体选用49MHz的JA12型。电感元件的参数见表2。中频定为455kHz或465kHz。
为了减小舵机电路的体积,舵机电路中尽量选用钽电解电容,在体积要求不严的地方可选用CD11铝电解电容。
调试前应仔细检查电路板上的元件有无错焊和漏焊,检查无误后再接通电源。调试编码部分,可将示波器接到LM1871的13脚与地之间,按图2所注四种不同方式扳动开关K\(_{1}\)、K2,应能出现图2(a)~(d)所示四种波形。先后转动图1中W\(_{1}\)和W2转柄,第1、2两个信号脉冲的宽度应都能在0.5~2ms内连续变化。如果变化范围太小,说明电位器阻值不够,应改换较大阻值的电位器。若没有示波器,可用万用表测LM1871的13脚电压,编码部分工作时,电压约为4V左右。
调试高频发射部分,可使用高频示波器或场强计,适当调整图1中L\(_{1}\)及L2的磁芯,使得输出波形最佳或场强计指示最大。在业余条件下,可利用电视机的1频道进行观察。调整L\(_{1}\)及L2的磁芯使屏幕上出现明显干扰,就说明发射部分已开始工作了。
接收部分用毫伏表调整。当将已工作的发射机天线靠近接收天线时,用毫伏表监测图4中B\(_{2}\)次级电压,调整图4中L1磁芯,若毫伏表有明显指示,说明本振电路起振。然后依次调整B\(_{3}\)1\(_{2}\)的磁芯,使毫伏表指示最大。如果没有毫伏表,可用万用表监测LM1872的第7、9脚电压,将图1中K1、K\(_{2}\)按表1所示的几种方式接通或断开时,电压高低变化应符合表1规律。然后逐渐拉开发射机与接收机之间的距离,逐一调整B3\(_{1}\)2的磁芯,使效果最佳为止。
本电路在调试正常的情况下,加接1米左右的天线,控制距离可达60米。如有特殊需要,可在发射机电路中加装1~2级高放电路,并将发射机电压适当提高(不得超过15V),控制距离可大大增加。
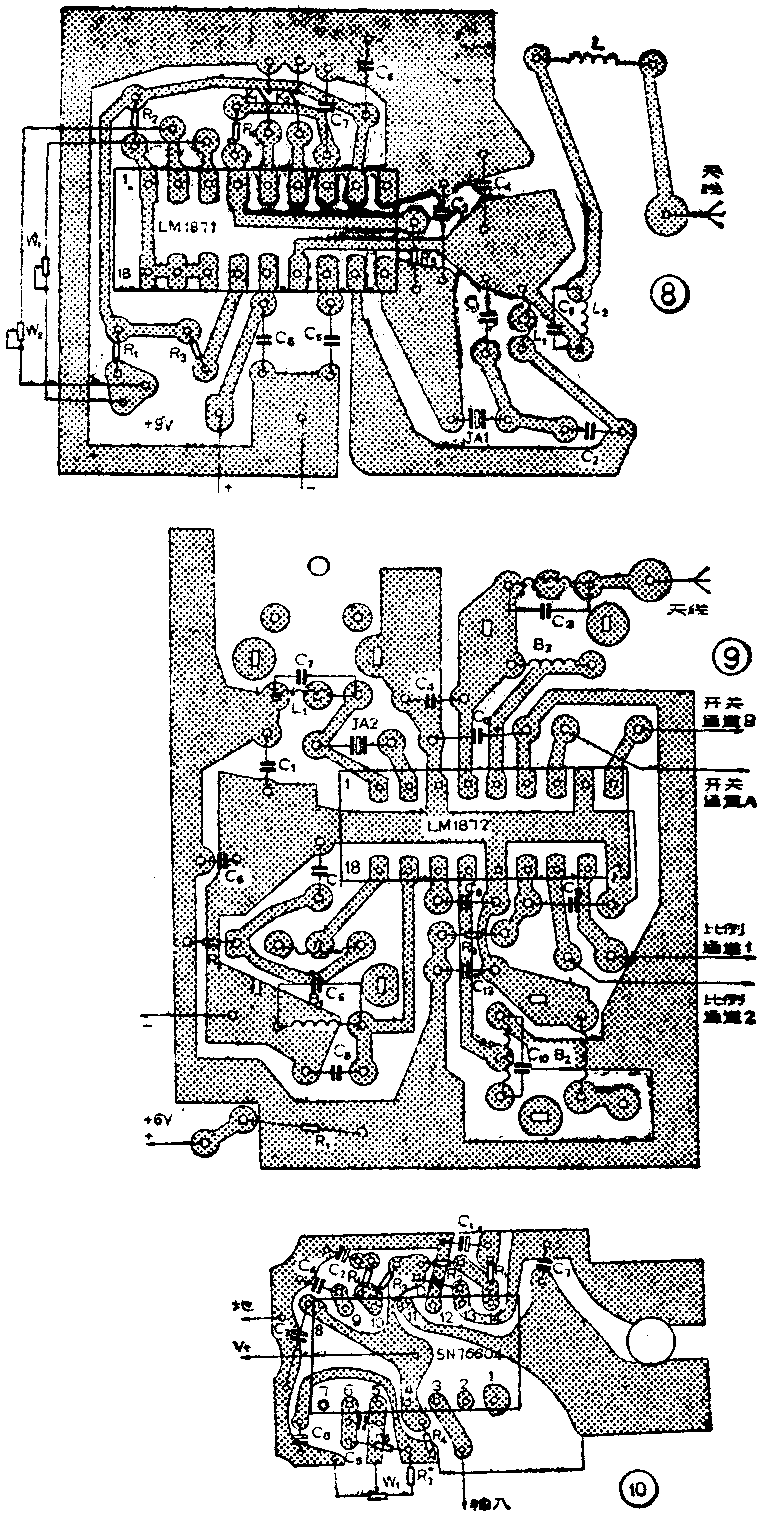
图8是发射机部分的印制板图。图9是接收机部分的印制板图。图10是随动电路部分印制板图。供读者制作时参考。印制板图比例均为1∶1。
模型整机的电路板和导线要安装牢固,否则振动后发生松动,造成分布电容的变化,将使频率偏移,接收机的灵敏度会下降。另外,发射机部分和接收机部分在装入机壳前虽已调整好,在模型整机安装好之后,最好再细心调整一遍。(赵建伟 朱景丰)