可控硅有源逆变的工作过程和整流相反,它能通过可控硅电路,把直流电能变换成交流电能送到电网中去,它实际上是两组电源之间的能量交换。
为什么要同极性相连
两组电源之间进行能量交换时,总是一方输出功率,另一方吸收功率。但是,要做到这一点,必须按照“同极性相连”的原则连接,就是把两组电源的正极和正极相连,负极和负极相连(图1)。否则就不能进行能量交换,其原因如下。
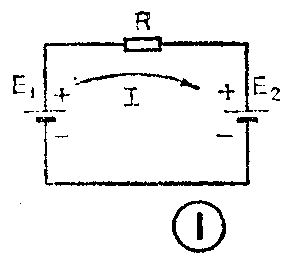
先看同极性相连的情况。由图可见,当两组电源的电势E\(_{1}\)>E2时,回路电流便等于I=(E\(_{1}\)-E2)/R,这时电源E\(_{1}\)输出功率,E2吸收功率,电能传递的方向是从E\(_{1}\)到E2。电路中的电阻R是包括电源内阻在内的回路总电阻,电流通过这个电阻时要消耗一定的功率。
如果我们把图1中两组电源的极性都颠倒过来,不难看出,它们之间仍然是“同极性相连”(图2)。这时,假定电势E\(_{2}\)>E1,那么回路电流便等于I=(E\(_{2}\)- E1)/R,电流方向并没有变化,但输出功率的电源变成了E\(_{2}\),吸收功率的电源变成了E1,电能传递方向也变成从E\(_{2}\)到E1了。
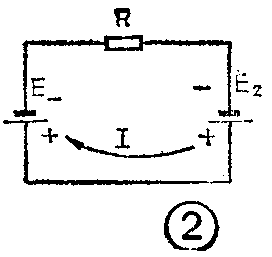
由此可见,在同极性相连的情况下,电势高的电源总是输出功率,而电势低的电源则吸收功率。因此,我们可以根据两组电源电势的高低确定能量传递的方向,用调整两组电源电势的差值控制能量交换的快慢。
因为在实际电路中,R的阻值一般是不大的,所以只要很小的电势差,就能产生较大的回路电流,也就能形成较快的能量交换。
如果不是同极性相连又会怎样呢?如图3所示,电源E\(_{1}\)和E2是反极性相连。这时,对整个回路来说,两组电源是顺向串联的,在这种情况下,不存在能量交换,而是两组电源都输出功率,它们所给出的能量都被消耗在电阻R上。
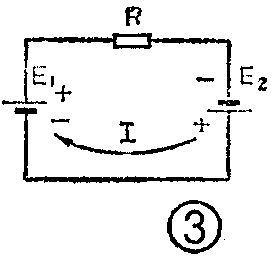
由图3可见,不同极相连时回路电流等于I=(E\(_{1}\)+E2)/R,由于R值很小,回路电流就很大,这就有可能出现近于短路的情况。出此,这种反极性相连的电路,不仅不能实现能量交换,而且还有短路的危险。
需要一个反向电压
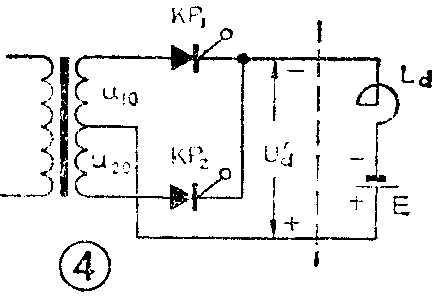
图4中虚线左边是一个可控硅双半波整流电路,右边是一个电抗器L\(_{d}\)和一个直流电源E相串联的电路,直流电源的极性是下正上负。乍一看,这个电路似乎是一个整流电源向负载供电的电路,实际上它却是一个有源逆变电路。
既然直流电源E的极性是下正上负,那么当两组电源之间进行能量交换时,整流电路也必须输出一个下正上负的反向电压U\(^{'}\)\(_{d}\),否则就不符合“同极性相连”的原则。而且由于可控硅的单向导电特性,决定了这时的电能传递方向只能是从E到U'd,因此电源E的数值一定要大于整流电路的输出电压U\(^{'}\)\(_{d}\)。但在实用中,为了防止过电流,只要使E的数值略大于U'd就可以了。
为了输出一个符合要求的反向电压,必须把可控硅的控制角调整到π2<α<π的范围内。
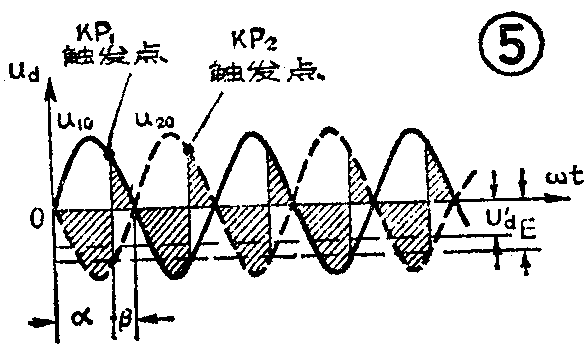
如图5所示,当u\(_{1}\)0变化到ωt=α时,可控硅KP1触发导通,当u\(_{1}\)0过零进入负半周时,由于E的极性正好与可控硅导通的方向一致,所以虽然u10已经进入负半周,可控硅KP\(_{1}\)仍因承受正向电压而导通。当u10继续变负,以致在数值上赶上和超过E值时,电抗器L\(_{d}\)使将磁场能量变成电能释放出来,维持着KP1继续导通,一直等到下一个触发脉冲到来,KP\(_{2}\)导通之后,KP1才因为通过的电流低于维持电流而阻断。然后,KP\(_{2}\)重复以上的变化过程……。
从输出电压u\(_{d}\)的波形图可以看出,表示可控硅导通的斜线部分反向的面积大于正向面积,所以输出电压的平均值u\(^{'}\)d就成为下正上负的反向电压。
这个电路尽管从形式上看是一个双半波整流电路,但从它所做的工作看,直流电源E是通过可控硅电路把电能送到了交流电网中,它已不再起整流作用,而是起着逆变的作用了。因此,把可控硅整流电路的这种式作状态、叫做逆变状态。
为了方便起见,在逆变状态下,把输出电压的波形图上ωt=π这一点作为零,沿着横轴问左计算,直到触发脉冲加入的那一点,这个范围所对应的角度叫做逆变角,用符号β表示。很显然,α+β=π(见图5)。
这样一来,可控硅整流电路的逆变条件,可以用控制用α,也可以用逆变角β来表示,这就是:
从整流到有源逆变
如果我们把图4中的直流电源E换上一个直流电机D,就组成了一个由可控硅整流电路控制的直流电机拖动电路(图6)。
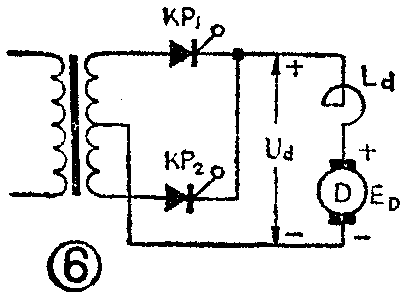
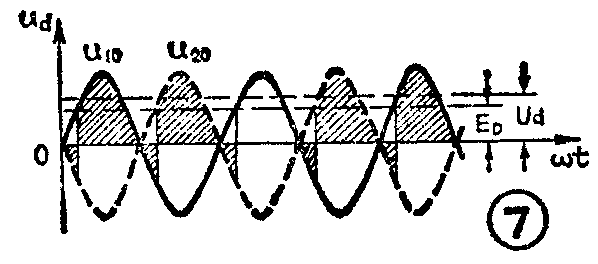
当可控硅控制角在0<α<\(\frac{π}{2}\)范围时,可控硅整流电路输出一个上正下负的直流电压U\(_{d}\)(图7)。这时,直流电机因为有电流流过而转动。与此同时,直流电视的电枢产生一个反电势ED,它的极性是上正下负。可见,这里的U\(_{d}\)和ED与图1相同,也是同极性相连。而且在这种情况下,U\(_{d}\)始终略大于ED,所以交流电网便通过可控硅整流电路向电机供电,这就是直流电机转动的能量来源。我们把可控硅整流电路将交流电能变成直流电能供给负载的状态叫做整流状态。这时的整流电路就是一个向负载供电的整流电源。
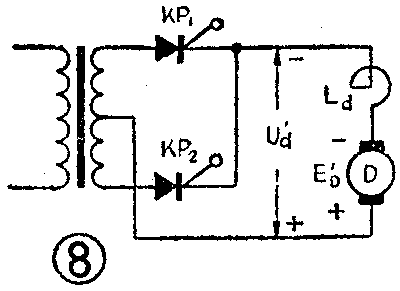
如果我们设法把图6中E\(_{D}\)的极性反过来,变成下正上负,情况就完全不同了。例如,起重机在提升重物时电机正方向旋转,这时电机作电动运转,ED的极性为上正下负;当重物下降时,由于重物的牵引作用使电机反方向旋转,这时电机作发电运转,产生一个电枢电势E\(^{'}\)\(_{D}\),它的极性正好与正方向作电动运转时的反向电势ED相反,变成下正上负了。这时,只要我们把控制角调整在\(\frac{π}{2}\)<α<π的范围内,使整流电路输出的反向电压U'\(_{d}\)在数值上略小于E\(^{'}\)D,那么它就变成与图4相同的有源逆变电路了(图8)。于是,直流电机的能量就可以通过处于逆变状态的可控硅整流电路送到交流电网中去,实现了有源逆变,从而直流电机被迅速制动。
改变电枢电势极性的方法,除了用改变电机旋转方向的方法外,还可以用改变电机激磁电流的方向等方法。
在这里顺便说明一下,本刊84年第五期“可控硅整流和逆变电路”一文中,39页右上3行“……还在继续转动”之后,应加上“如果我们设法改变激磁电流的方向”等字。否则,在电机旋转方向不变的情况下,电枢电势的极性是不可能改变的。
由此可见,同一个可控硅整流电路,在一种条件下可以用作整流电源;而在另一例条件下,又可以完成有源逆变的工作。因此,正确地掌握和灵活地运用这些条件,是了解和使用这类电路的关键。
更完善的有源逆变电路
从以上分析可以知道,在直流电机拖动电路中,只要能使电机从电动运转变成发电运转,并使电枢电势的极性与可控硅的导通方向一致,就能用一组可控硅整流电路实现有源逆变,使电机制动。但是,在实际工作中,电机电枢的电势极性并不是都能随意改变的。在这种情况下,可以用两组可控硅整流电路,经过合理地组合之后,得到一种性能优异的“可逆电路”。
如图9所示,A、B是完全相同的两组可控硅整流电路,L\(_{a}\)为电抗器,D为直流电机。
因为直流电机的旋转方向是和电流的方向有关的,当A组电路工作在整流状态时,流过电机的电流为I\(_{a}\),假设这时电机的旋转方向为正方向。那么,当B组电路工作在整流状态时,流过电机的电流是和Ia反向的I\(_{b}\),所以电机将作反方向的旋转。
如果要想使正方向旋转的电机迅速制动,只要停止A组电路的整流工作,同时使B组工作在逆变状态就可以了。这时因为惯性而继续正向旋转的电机作发电运转,所发电势E\(^{'}\)\(_{D}\)的极性和作电动运转时相同,即仍为上正下负。而这时的B组电路正工作在逆变状态,它输出的反向电压U'd恰好也是上正下负(见图9),因此满足了“同极性相连”的要求。与此同时,还必须调整B组的逆变角β,使E\(^{'}\)\(_{D}\)略大于U'd,这样就具备了有源逆变的条件。这时,电机把机械能变成的电能通过可控硅整流电路送到电网中,于是正方向旋转着的电机便被迅速制动。
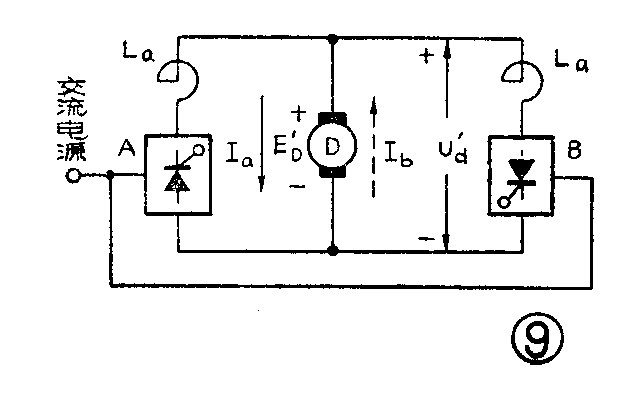
同样,当电机在反方向旋转的情况下,只要停止B组电路的整流工作,同时使A组工作在逆变状态,就可以使电机迅速被制动。可见这种电路,能够实现正反两个方向的旋转和制动,因此是一种性能更完善用途更广泛的“可逆电路”。
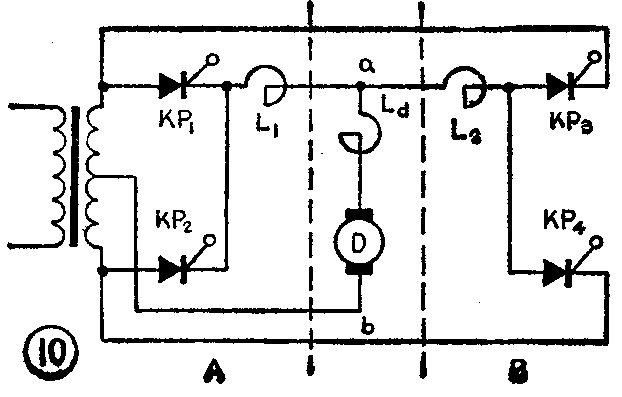
图10是利用两个可控硅双半波整流电路组成的可逆电路。因为这个电路中,当A组电路工作在整流状态时,输出极性为上正下负电压U\(_{ab}\),正好是B组可控硅的正向电压,这时如果有脉冲加到B组可控硅上就会造成短路。所以要想在A组电路工作在整流状态时,B组不流过电流,就必须使B组电路输出一个大小和Uab相等而极性正好也是上正下负的电压。这就必须对工作在整流状态的A组和同时工作在逆变状态的B组电路提出严格的要求。对照图5和图7可以知道,这个要求就是必须使A组可控硅的控制角α\(_{A}\)等于B组的逆变角βB。同样,当B组电路工作在整流状态而A组工作在逆变状态时,必须使α\(_{B}\)=βA。
要使可控硅整流电路进行有源逆变,从内部来说,可控硅电路必须处于逆变状态,也就是说,它的输出端必须要有一个反向电压U\(^{'}\)\(_{d}\)。从外部来说,它的负载则必须有一个极性和可控硅导通方向一致的直流电源。如果不能满足这两点要求,可控硅有源逆变是不可能实现的。因此,并不是所有的可控硅整流电路都能进行有源逆变的。例如:半控桥和接有续流二极管的电路,因为它们不可能输出反向电压,也不允许负载侧出现反极性的直流电源,所以都不能实现有源逆变。
因为可控硅有源逆变是利用可控硅电路进行能量交换的,所以只要抓住可控硅电路的特点和两组电源之间能量交换的原则,弄懂这类电路是不难的。(方波)