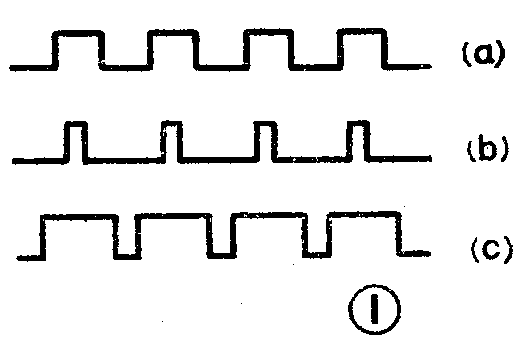
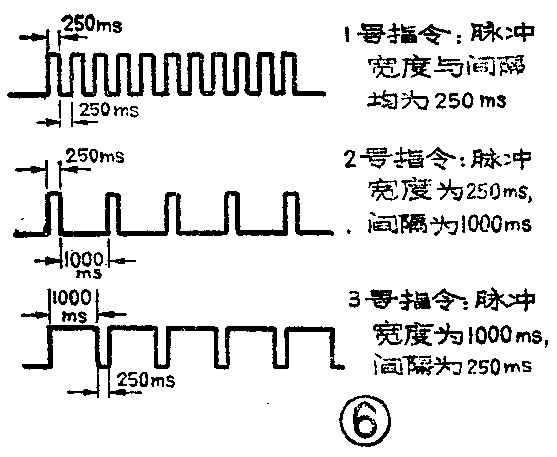
本文介绍一种用于船舰模型上的无线电遥控装置。它虽然是单通道的,由于在接收机的输出端加了简易译码电路,所以控制功能跟多通道的非常相似。使用时,当发射机发送如图1a所示的脉冲宽度与脉冲间隔相等的指令时,模型就直线前进;当发送如图1b所示脉冲宽度较窄的指令时,模型即向左转;当发送机发送如图1c所示脉冲宽度较宽的指令时,模型即向右转;不发送指令时,模型停止运动。
发射机电路原理
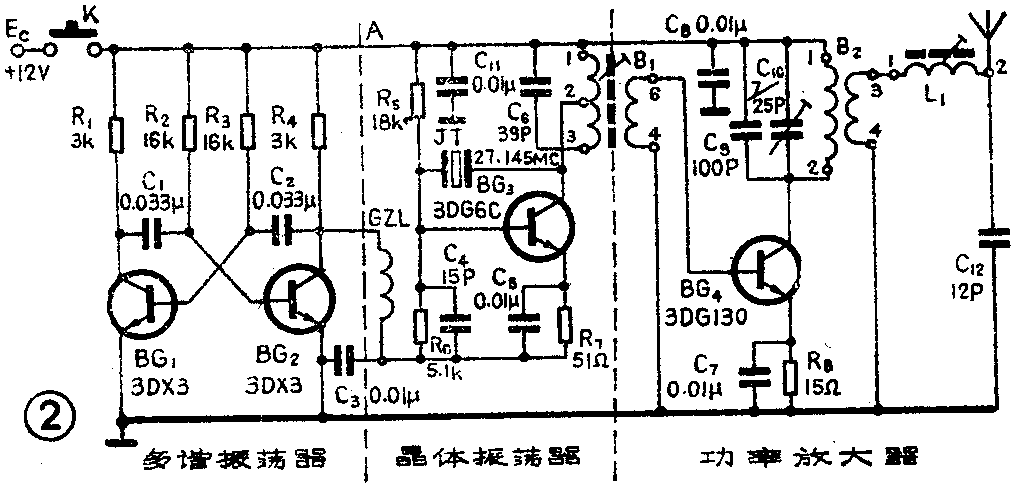
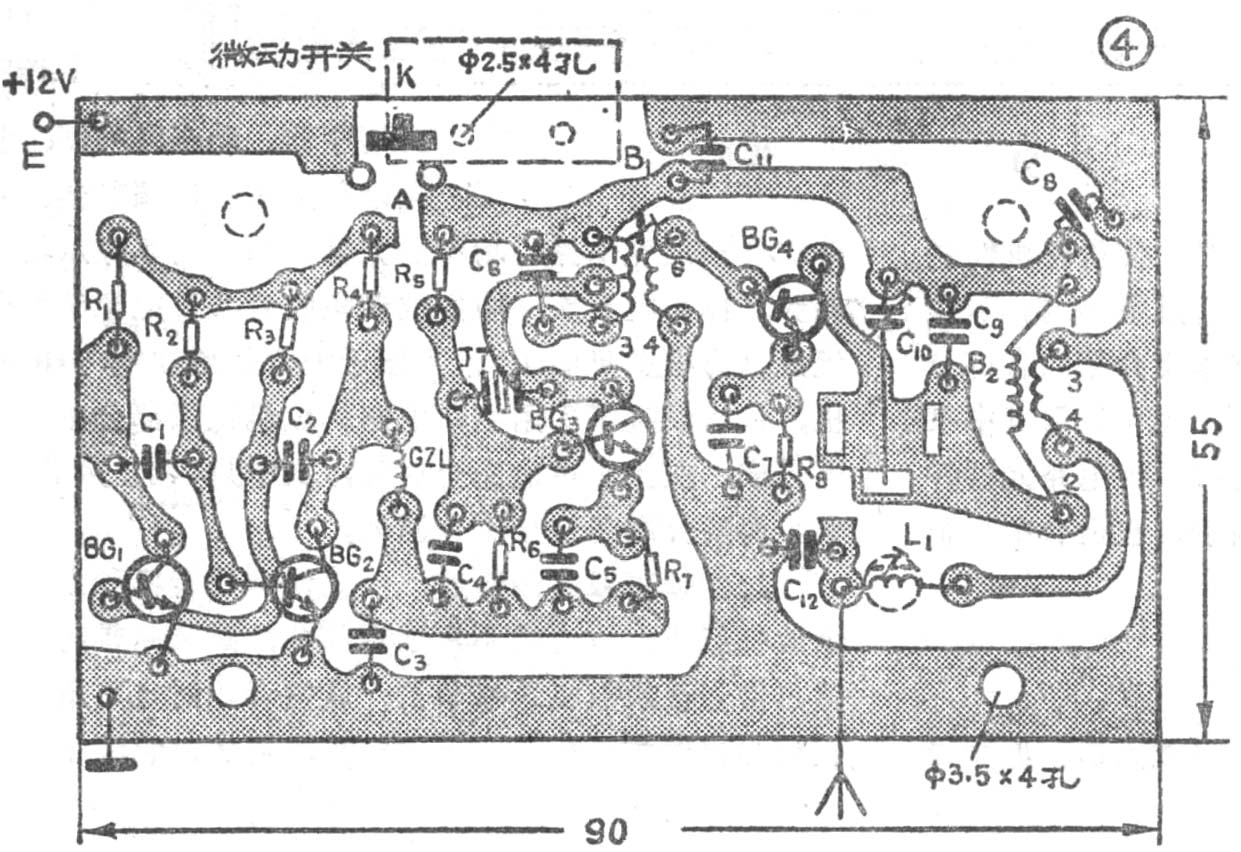
图2为发射机的电原理图。其中BG\(_{1}\)、BG2等组成多谐振荡器,这两个管子轮流地饱和和截止,产生约1700赫左右的音频信号。BG\(_{3}\)等组成石英晶体振荡器,它能产生27.145兆赫的非常稳定的高频信号。BG3工作与否,是受BG\(_{2}\)的集电极电压控制的,当BG2饱和时,BG\(_{3}\)即振荡,BG2截止时,BG\(_{3}\)即停振。因此由高频变压器B1输出的将是被1700赫的音频信号所调制的27.145兆赫的高频调幅波,BG\(_{2}\)在这里起到了一个调制器的作用。为了提高发射机的效率,BG4等组成丙类功率放大器,把已调波再送到功放级进行功率放大,然后通过高频变压器B\(_{2}\)耦合,由天线发送出去。
接收机电路原理
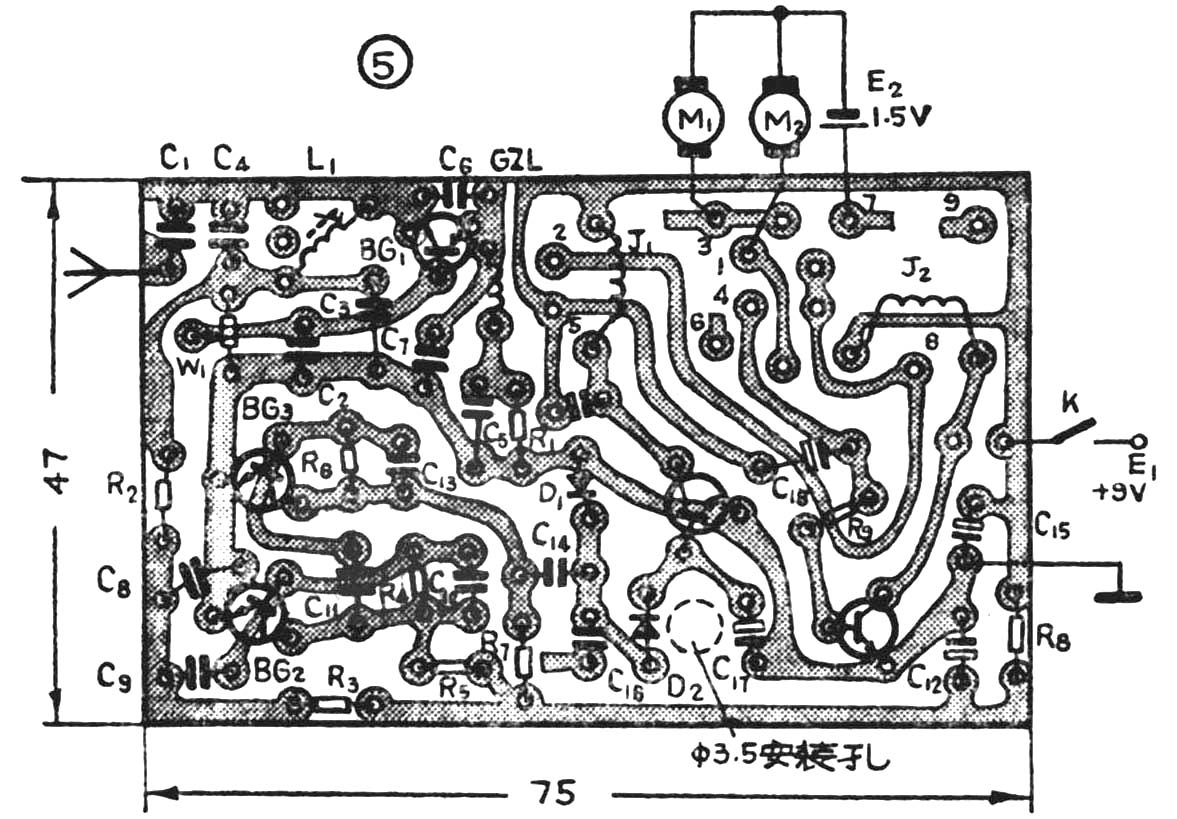
图3为接收机原理图,其中BG\(_{1}\)等组成超再生检波器,R2、C\(_{3}\)、C8组成滤波电路,以保证检波器的正常工作。检波后的音频信号通过C\(_{9}\)送至由BG2、BG\(_{3}\)等组成的两级音频电压放大器中进行音频放大。经放大后的音频信号,再由C14耦合并经D\(_{1}\)、D2整流后作为开关信号送至开关管BG\(_{4}\)的基极。当信号足够大时,BG4即饱和,继电器J\(_{1}\)即吸合。
译码器的工作原理
在图3的最后部分,继电器J\(_{1}\)的两组转换触点J1-1和J\(_{1}\)-2、BG5、继电器J\(_{2}\)的转换触点J2-1、两个玩具电动机M\(_{1}\)和M2等组成一种简易脉冲宽度可变译码器电路。其中BG\(_{5}\)、R9、C\(_{18}\)、J2等组成一种延迟释放继电器电路,它能在J\(_{1}\)吸合时,即J1-2的触点4、5接通时,J\(_{2}\)即吸合;而当J1开始释放,触点4、5断开时,由于电容器C\(_{18}\)的存在,电容器上的电压不能突变,所以J2要延迟一段时间后才慢慢释放。延迟时间的长短由R\(_{9}\)、C18的数值决定。若在模型的尾部左右两侧再对称地装上两个相同的电动机M\(_{1}\)与M2,全部连线如图3的“译码器电路”所示,就能作为一种简易译码器使用了。
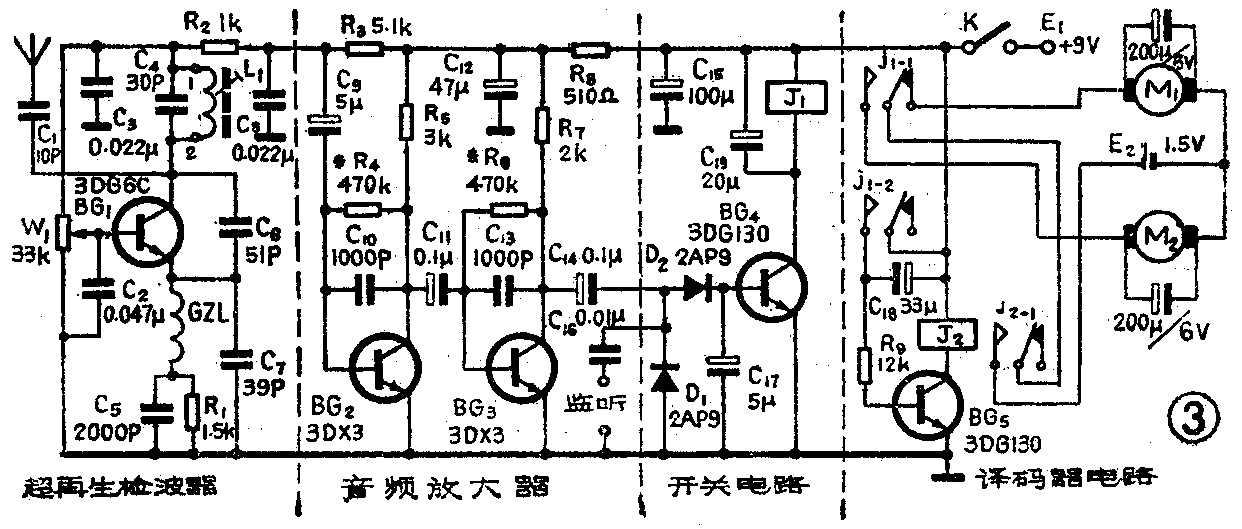
下面以用于船舰模型为例来说明它的工作原理:当发射机不发指令时,接收机中的J\(_{1}\)、J2 均释放,J\(_{2}\)-1中的触点7、8断开,电源E2对两个电动机M\(_{1}\)与M2均不供电,船模停航;当发射机发送指令信号的脉冲宽度等于脉冲间隔时,设此时为1号信号,J\(_{1}\)-1、J1-2均间歇地吸合与释放,两组触刀2与5均有一半时间分别跟常开触点1与4接通,而另一半时间又分别跟常闭触点3与6接通,由于J\(_{2}\)延时释放的缘故,所以J2始终呈吸合状态。E\(_{2}\)对M1与M\(_{2}\)的供电时间相等,两个电动机转速基本相同,模型直线前进,相当于打中舵;当发射机发送指令信号的脉冲宽度小于脉冲间隔(如图1b)时(设此时为第2号命令),J1-1、J\(_{1}\)-2的两组触刀2与5分别跟触点1与4的接触时间较短,跟3与6的接触时间较长,而延时释放继电器J2仍旧始终呈吸合状态,E\(_{2}\)对M2的供电时间小于对M\(_{1}\)的供电时间,M2的平均转速小于M\(_{1}\)的平均转速,模型于是打左舵;当发射机发送指令信号的脉冲宽度大于脉冲间隔(如图1c)时(设为第3号指令),J1-1、J\(_{1}\)-2的两组触刀2与5分别跟触点1与4的接触时间较长,跟3与6的接触时间较短,而J2仍旧吸合,E\(_{2}\)对M2的供电时间大于对M\(_{1}\)的供电时间,M2的平均转速大于M\(_{1}\)的平均转速,此时模型打右舵。
这个电路的特点是,只要有脉冲指令存在,J\(_{2}\)即吸合,电源E2即能对M\(_{1}\)或M2供电,模型就能动作。若脉冲指令停止,J\(_{2}\)释放,电源E2切断,模型就停止动作。如果在M\(_{1}\)与M2上装上适当的减速齿轮,同样可以用于车辆模型上。
元件选择与制作经验
全套收发装置共用9只硅NPN型晶体管,对管子的要求见表1,只要符合表中要求,处理品管也能应用。
表1
发 射 机 接 收 机
BG1 BG2 BG3 BG4 BG1 BG2 BG3 BG4 BG5
型 号 3DX3 3DX3 3DG6C 3DG130 3DG6 3DX3 3DX3 3DK4 3DK4
代用型号 3DK3 3DX3 3Dk3 3DK4 3DK3 3DK3 3DG130 3DG130 3DG130
3DG6 3DG6 3DG80 3DG80 3DG6 3DG6
β ≥30 ≥30 ≥60 ≥80 30~100 30~100 30~100 ≥60 ≥60
BVceo(v) ≥15V ≥15V ≥20V ≥20V ≥10V ≥10V ≥10V ≥15V ≥15V
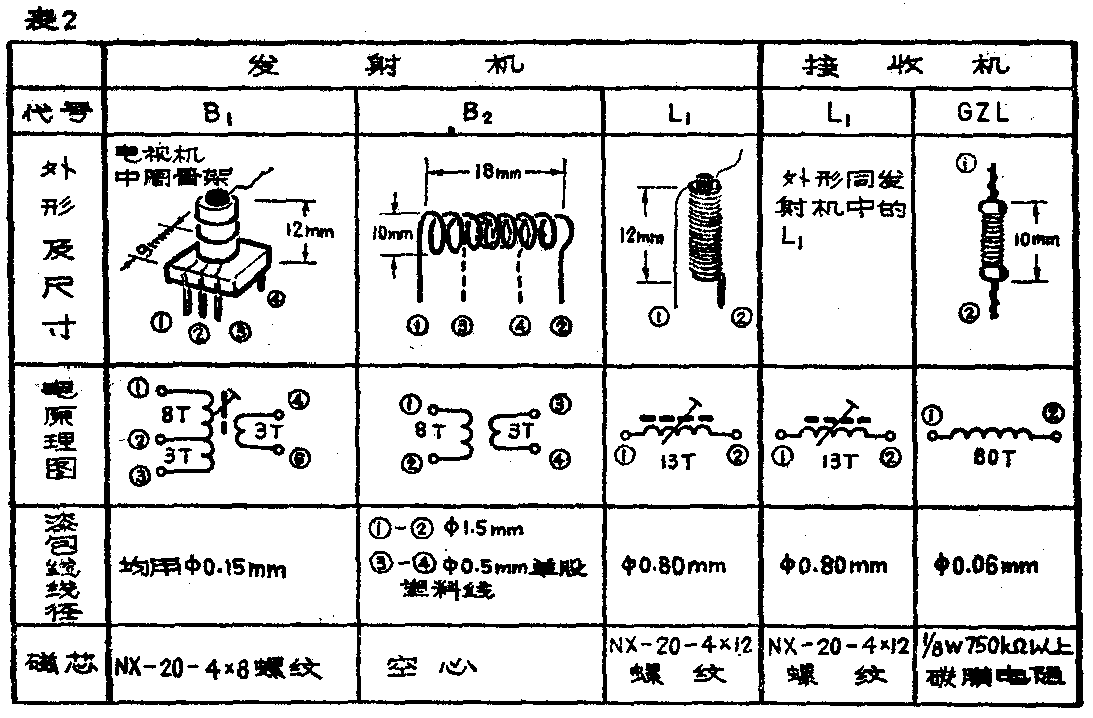
全部线圈,包括高频变压器、加感线圈、调谐线圈、高频扼流圈等的绕制数据和外形尺寸见表2。石英晶体用JA12A小型谐振器,继电器J\(_{1}\)与J2分别用HG—9V—4099与HG—9V—4098,M\(_{1}\)与M2可用131或151玩具电动机。
调试经验
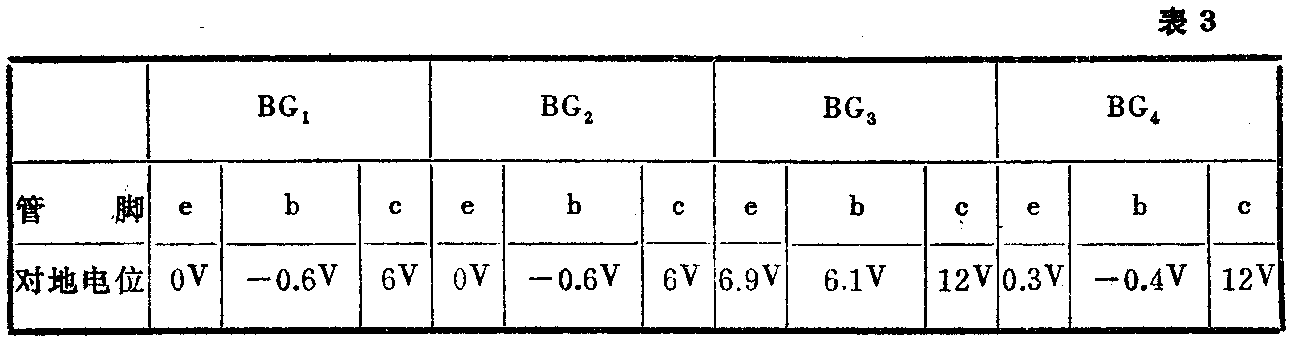
发射机的调试:先调音频部分,断开图2中的A点,接通电源,测BG\(_{1}\)与BG2各个管脚的对地直流电位,应大致符合表3中要求,此时说明电路已经起振。再调载频部分,仍旧断开A点,使+12V电源直接加到石英晶体的主振级,电源负极接R\(_{6}\)的下端,在BG3的集电极与B\(_{1}\)的初级之间串接一只量程为50mA的直流毫安表,高频变压器B1中的磁芯暂时不旋入,调节R\(_{5}\),使毫安表的读数在10mA左右。然后把NX—20螺纹可调磁芯由上而下渐渐地旋入B1的骨架内(中间嵌一小段小橡皮筋,以免松动)。并注意观察毫安表的读数,当磁芯旋至一定位置时,会发现毫安表的读数突然增大到16mA左右,此时说明电路已经起振。起振后应将磁芯仍按原方向继续往下再旋入约半圈左右,然后反复通、断电源数次,务必使每次接通电源时,电路仍应立即起振为止。接通A点,电源负极恢复接地端,测BG\(_{3}\)、BG4各个管脚的对地直流电位,应大致符合表3中所列数据,此时整机电流应在40毫安左右。把起振后的电路板装入发射机机壳内,并接上1.5米长的拉杆天线(也可用φ10mm左右的空心铜管)。用一只简易场强计,也拉出其天线,并使两机的天线相互平行,相距约1米左右,微微调节C\(_{1}\)0和加感线圈L1的磁芯,使场强计的读数最大为止。
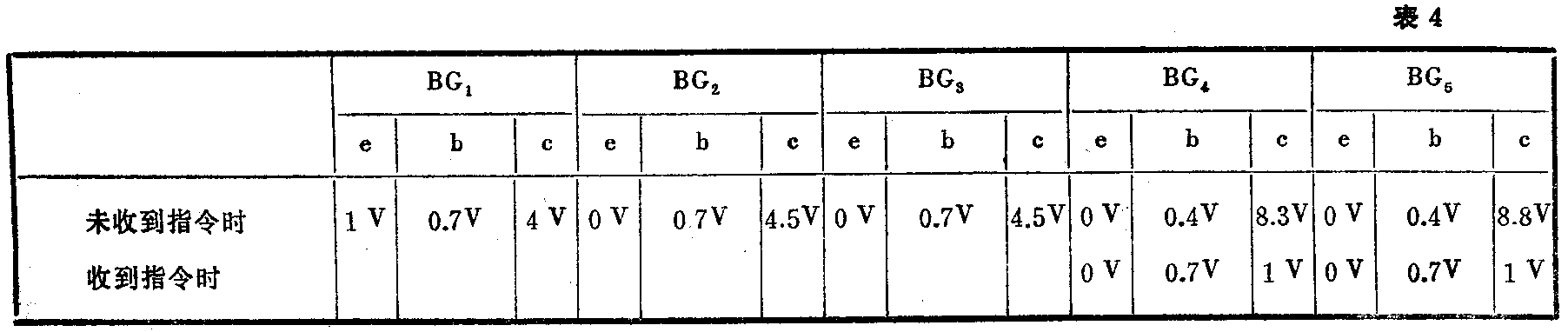
接收机的调试:把除译码器和R\(_{4}\)、R6之外的全部元件都接好,先调音频放大器,依次分别调节R\(_{4}\)、R6,使BG\(_{2}\)和BG3各个管脚的对地直流电位应大致符合表4要求。用一个1500欧的耳机,跨接在监听点与地之间,用螺丝刀碰C\(_{9}\)的正极,如果耳塞机中有较为响亮的“喀喀”声,即为正常。然后再调超再生检波器,调节电位器W1,使耳塞机中出现平稳的“沙沙”声,则可检查BG\(_{1}\)各个管脚的对地直流电位是否符合表4中所列的数据。若各管脚的直流电位基本正常,但仍无沙沙声,则可以微微调节L1的磁芯,若再无“沙沙”声,则还可以适当增加C\(_{6}\)的数值。如果管子是好的,经过上述调节后是一定能够调好的。开关电路部分无调节元件。最后把发射机靠近接收机,使每发送一次指令信号,接收机中的继电器J1即能吸合一次。再逐渐拉开距离,适当调节接收机中L\(_{1}\)的磁芯,使监听耳塞机中的音频信号最响,这套遥控装置在空旷地区的有效控制距离可达200米以上。
脉冲宽度可变译码器的调试:暂时不接电源E\(_{2}\),把J2、BG\(_{5}\)、R9、C\(_{18}\)等元件接好,接通E1,此时继电器J\(_{2}\)是释放的,若发一短脉冲指令信号(取脉冲宽度约为250mS),使接收机中的J1也短暂地吸合一次,J\(_{2}\)即跟着吸合,观察J2延迟释放的时间,应在1200mS左右。若远小于1200mS,应适当加大C\(_{18}\)的数值,反之则应减小,使最后能达到1200mS为止。然后接上E2、M\(_{1}\)、M2,发送1号指令(脉冲宽度与间隔的参考数据示于图6)。M\(_{1}\)与M2的转速基本相等;发2号指令时,M\(_{1}\)的转速应大于M2;发3号指令时,M\(_{1}\)的转速应小于M2。
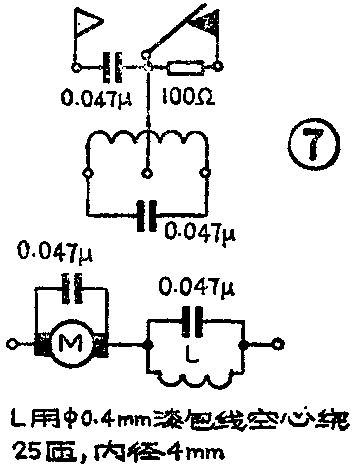
最后把发射机、接收机和译码器再进行联合调试。如果电动机M\(_{1}\)与M2和继电器触点的通断对接收机有火花干扰时,除E\(_{2}\)的电压不能取得太高之外,还可以接上适当的灭火花电路。图7给出了一种简单的灭火花电路,可以供参考。(汤诞元)