利用可控硅的特殊开关作用可以把交流电能变换成直流电能,这就是整流;也可以把直流电能变换成交流电能,因为这种变换正好和整流相反,所以叫做逆变。
可控硅整流电路是怎样工作的
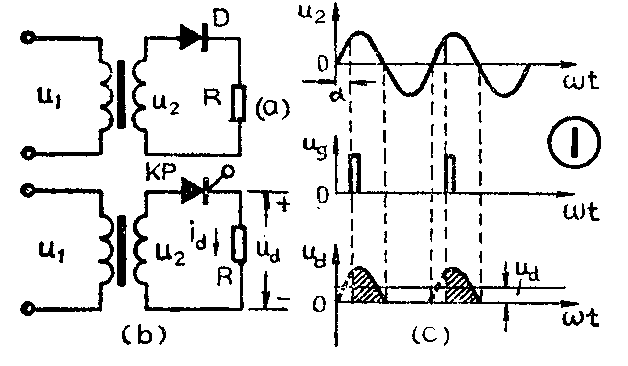
可控硅整流电路是在二极管整流电路的基础上发展而来的,它的主电路在结构形式上与二极管整流电路完全相同。例如把二极管单相半波整流电路中的二极管换成可控硅,就得到可控硅单相半波整流电路的主电路(图1)。
我们知道,二极管整流电路是靠二极管的正向导通和反向截止的性能实现整流的。这种导通和截止的变换是随着电源电压的极性变换自然进行的:电压为正半周时它就导通;电压为负半周时它就截止。而且整流输出的直流电压,一般是不能变化的,它的大小是由交流电源电压决定的:电源电压高,输出的直流电压就高;电源电压低,输出的直流电压也低。
可控硅整流电路因为使用的是可控硅器件,所以具有可以控制的特点。由于可控硅的导通和阻断,除了和电源电压极性有关外,还要看控制板是否加上触发电压,而且它的导通程度还和触发脉冲加入的时刻,也就是和控制角α有关。在交流电源电压不变的情况下,控制角α越小,输出直流电压U\(_{d}\)越高;α越大,Ud越低(图1c)。所以可控硅整流电路的输出直流电压是由交流电源电压和控制角这两个条件决定的,而且控制角α是可以调节的。这是可控硅整流电路的优点。一般的二极管整流电路只能在输入端用交流调压的方法去得到变化的直流输出电压,这就要使用笨重的调压器。而可控硅整流电路只需用一个小巧的电位器去改变触发脉冲给出的时刻,也就是改变控制角α的大小就可以得到数值能变化的直流电压。可见,有了二极管整流的基础知识,再抓住分析可控硅电路的关键——控制角,可控硅整流电路的工作原理就比较容易掌握了。
图2a是单相桥式全控整流电路。当变压器次级电压u\(_{2}\)处于正半周时,A端为正,B端为负,可控硅KP1和KP\(_{2}\)处于正向电压作用下,只要有触发脉冲来到就可以导通;而KP3、KP\(_{4}\)因为处于反向电压作用下,不管有没有触发脉冲都不能导通。如果我们在相当于控制角α=ωt1的时刻给KP\(_{1}\)、KP2的控制极同到加上触发脉冲u\(_{g1}\)、ug2(见图2b),那么这两只可控硅就会导通。负载R中便有电流流通,路径是A→KP\(_{1}\)→R→KP2→B。因为通过负载的电流是从上往下的,所以输出电压U\(_{d}\)的极性是上正下负。
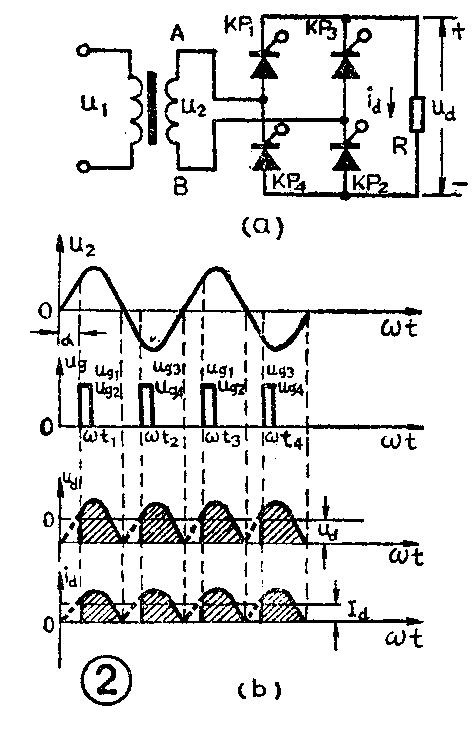
当交流电源电压u\(_{2}\)过零变负时,可控硅KP1、KP\(_{2}\)便自动阻断。当u2进入负半周时。B端为正,A端为负。如果在ωt\(_{2}\)=π+α的时刻也给KP3、KP\(_{4}\)加上触发脉冲ug3、u\(_{g4}\),则KP3和KP\(_{4}\)导通。负载中的电流路径是:B→KP3→R→KP\(_{4}\)→A。这时在输出端仍得到上正下负的直流电压。由于负载是电阻性的,负载中的电流id=\(\frac{u}{_{d}}\)R,所以电流的波形和电压的波形形状相同。这时输出端得到的直流电压就是脉动电压ud的平均值,用u\(_{d}\)表示。
由图2b可见,输出电压u\(_{d}\)的面积是随着控制角α的增大而减小的。当α=0时,可控硅全导通,输出电压波形的面积最大,这时的整流效果和二极管整流电路相同。当α=π时,可控硅阻断,输出电压等于零。所以这个电路的移相范围是0~π。
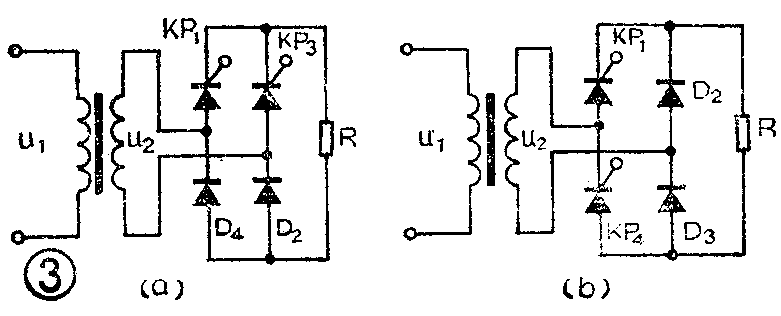
如果仅仅是为了达到可控整流的目的,可以把图2a中的KP\(_{2}\)和KP4用两只整流二极管代替,如图3a。这个电路在正半周时,只要触发KP\(_{1}\),由KP1、R、D\(_{2}\)构成电流通路:负半周时,只要触发KP3,由KP\(_{3}\)、R、D4构成电流通路,仍能实现整流。这样做既简化了触发方法,又节约了两只可控硅。当然也可以把电路按图3b的形式连接,两者的原理是完全相同的。由于这种电路的整流元件只有一部分是可控硅,是可以被脉冲控制的,所以把它叫做“半控”电路。而前面那种全部都用可控硅作整流元件的电路就叫“全控”电路。
电感性负载电路和续流二极管的作用
前面介绍的整流电路的负载都是电阻性的,而工业生产中却大量使用着既有电感又有电阻的负载。当负载中的感抗ωL和电阻相比不能忽略时,就成为电感性负载。例如各种电机的激磁绕组、滤波电路中的电感线圈等。
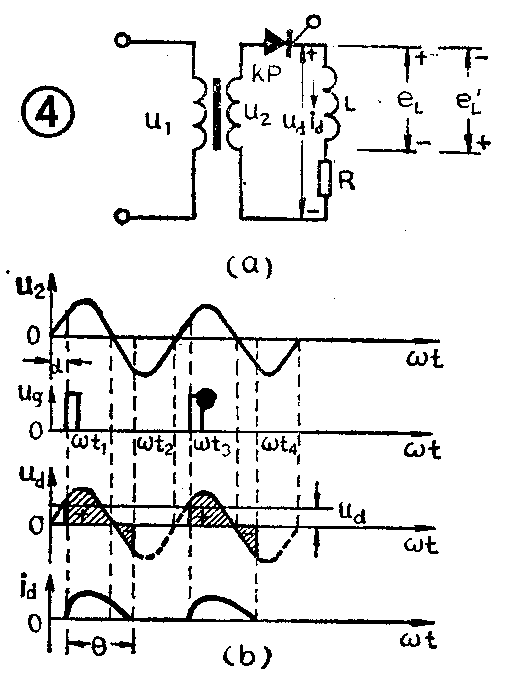
图4a是一个电感性负载的半波可控整流电路。当在电源电压u\(_{2}\)正半周的ωt1时刻(见图4b)用脉冲触发KP后,负载上立即得到直流脉动电压u\(_{d}\)。但是因为负载中有电感L,通过L的电流不能突变,因此电流只能从零开始逐渐增加,见图4b中id的波形。在i\(_{d}\)增加的过程中,电感L中产生一个力图阻止电流增加的自感电势eL,极性是上正下负,它的作用是阻止电流随电压的升高而增加。当电源电压u\(_{2}\)下降到某一值以及过零变负时,id减小,电感L两端产生一个上负下正的自感电势e\(_{L}\)′,它力图阻止电流id的减小。由于这个e\(_{L}\)′的出现,就使得u2进入负半周以后,在一段时间内,只要e\(_{L}\)′大于u2,就仍有可能使可控硅KP处于正向电压而维持继续导通的状态。又经过了一段时间,到了ωt\(_{2}\)的时刻,eL′=u\(_{2}\)时,可控硅上的电压等于零,同时id也降到维持电流以下,可控硅才阻断。由图4b可以看到,导通角θ包括了u\(_{d}\)正负波形的整个范围。也就是说,由于电感的作用,延迟了可控硅的阻断时间,使输出电压ud的波形出现了负值,结果使整流后的直流平均电压u\(_{d}\)下降。如果电感量很大,输出直流平均电压就降得很低,平均值电流Id也变得很小,使负载得不到应有的电压和电流值。
解决这个问题的方法比较简单,只要在负载上并联一个适当的二极管就可以了(图5a)。因为这个二极管D的接法是负极在上,正极在下,所以在可控硅导通时,它对电路不起作用;当电源电压u\(_{2}\)从正变负的瞬间,电感L中的自感电势eL′通过R和D放电,使可控硅在u\(_{2}\)过零变负时立即阻断。这样一来,负载上得到的直流脉动电压ud的波形就不再出现负值,它的波形就和电阻性负载时的波形完全相同(图5b)。但是因为有了这个二极管D,负载中电流i\(_{d}\)的波形却和电阻性负载时的电流波形不同。因为可控硅导通时,负载电流就是可控硅的整流电流。而可控硅在阻断时,电感L中的自感电动势eL′通过二极管D放电形成电流i\(_{S}\)。当电感量很大时,由于电感中电流不能突变,力图保持原来的大小,所以通过可控硅KP的电流iK和通过二极管D的电流i\(_{S}\)的波形都是数值相等的近似于水平的线段,把这两段波形排到一起就是负载电流的波形,见图5b。
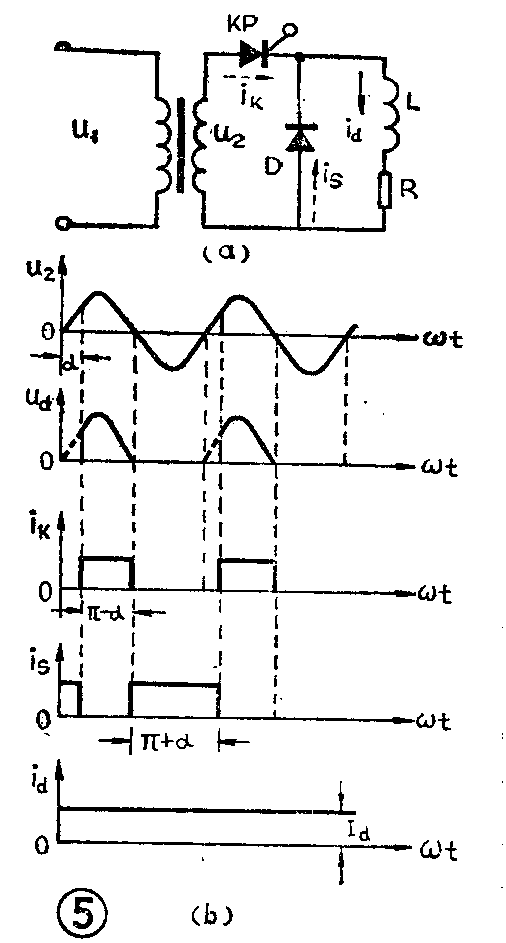
因为二极管D能在可控硅不导通时使负载中继续有电流流通,所以把它叫做续流二极管。有些半控整流电路中的整流二极管是同时有整流和续流作用的,如图3b中的D\(_{2}\)和D3,不需要另外再接续流二极管。
应当注意的是:通过续流二极管的电流是很大的。从图5b可见,它的平均电流是:I\(_{S}\)=\(\frac{π+α}{2π}\)·Id。而通过可控硅的平均电流则是:I\(_{K}\)=π-α;2π·Id。所以,选用续流二极管时必须挑选容量足够大的整流二极管。
可控硅电路是怎样实现逆变的
为了说明逆变状态,让我们先看图6。图中有两个电源E\(_{1}\)和E2,R是电路中的总电阻。因为两个电源是同极性连接的,所以在E\(_{1}\)>E2时,电路中的电流I=\(\frac{E}{_{1}}\)-E2R,这时电路中消耗的能量是由E\(_{1}\)供给的,电能从E1流向E\(_{2}\)。反之,如果E2>E\(_{1}\),则I′=E2-E\(_{1}\);R,电路中消耗的能量由E2供给,电能从E\(_{2}\)流向E1。这就是说,电能流动的方向是可以随着两组电源数值的变化而变化的。
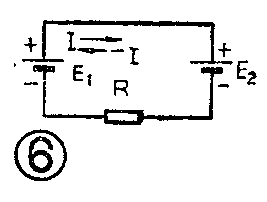
图7a是一个可控硅整流电路。图中左边是双半波整流电源,右边是带直流电源E的负载,E的极性是上正下负。假定整流输出的直流电压U\(_{d}\)>E,那么电能就从整流电源流向负载,这也就是整流的过程。
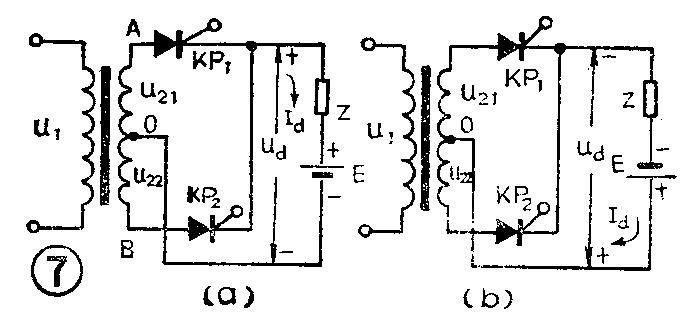
对图7a来讲,由于可控硅的单向导电特性,即使满足E>U\(_{d}\)的条件,电能也无法从负载流向电源。如果能设法把整流电压Ud和负载中的电源电压E的极性都反过来按图7b那样连接,于是,E的正极通过变压器次级线圈接到可控硅的阳极上,而E的负极则通过负载Z接到可控硅的阴极,使可控硅上所加的电压与导通要求的方向一致。这时,如果使E>U\(_{d}\),直流电能就会从右边的负载流向左边的整流电源,并通过变压器B送到交流电网。这种对应于整流的反向传送过程就叫做逆变。
但是,怎样才能使U\(_{d}\)和E的极性都改变过来呢?
实际应用中,当可控硅整流电路的负载是一个带有大滤波电感的直流电机时,就能同时实现整流和逆变。当可控硅整流电源驱动电机正常运转时,电路的连接为图8a。图中左边是提供驱动电机转动的整流电源,右边就是带大电感的直流电机。由于负载的滤波电感L的电感量很大,电路中又没有接入续流二极管,当控制角α被控制在0<α<π2范围内时,整流电压U\(_{d}\)的波形将出现负值。但是因为电压波形中正向的面积仍大于负向的面积,所以Ud的平均值U\(_{d}\)仍是正值(图8b),它的极性是上正下负。这时的电机是接受电能在作正常的运转,它在运转时会产生一个反电势ED,E\(_{D}\)的极性也是上正下负,见图8a。这时,电路是从交流电网经整流后向电机提供电能使电机转动,电能是从电源端传送到负载端,整个电路处于整流工作状态。
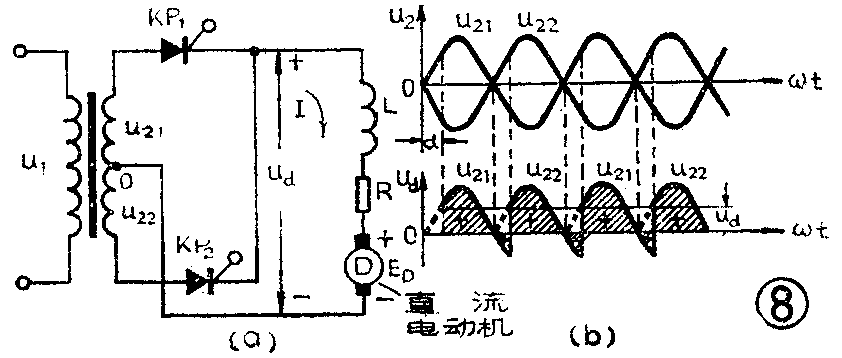
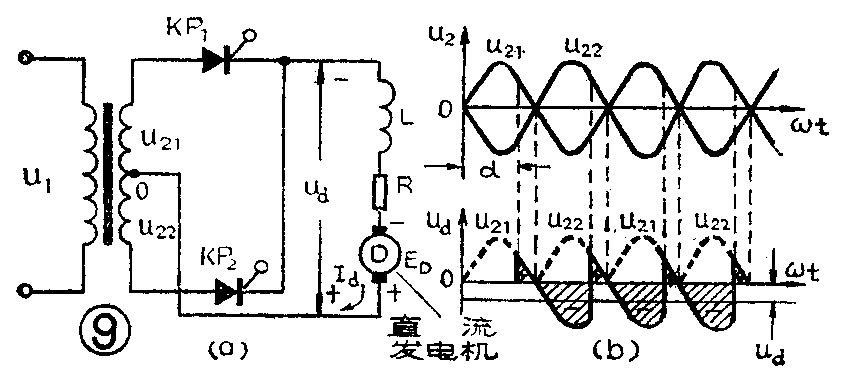
图9是电机被制动的状态。制动的方法是人为地把控制角α调整在\(\frac{π}{2}\)<α<π的范围内,这时整流电压U\(_{d}\)的波形,因为电路中有大电感而变成正向面积小于负向面积了,整流电压Ud的平均值U\(_{d}\)成为负值(图9b)所以在图9a中,Ud的极性变成上负下正。也就是电源停止向电机供电。但是电机本身因为惯性作用还在继续转动,这时的直流电机是把机械能变成电能输出而事实上变成了一个直流发电机,发电机的电压E\(_{d}\)的极性是上负下正,它的极性正好和这时的整流电压Ud的极性相同,见图9a。可见它的工作状态正与图7b相似,即是工作在逆变状态。也就是说,这时的电机把贮存的机械能变成电能后送回到交流电网,变成交流电能。电机本身则因为很快地把能量释放掉而被快速制动。这种把直流电能通过逆变反送到交流电网去的过程,叫做有源逆变。
从上面分析可见,调整可控硅的控制角α,就能在同一个电路上,完成整流和逆变两种相反的功能。这正是可控硅的可贵之处。
整流和逆变电路已被广泛应用于工业生产中。除了上面介绍的单相整流与逆变电路外,在大功率设备中,还大量使用着三相整流和逆变电路,它们的工作过程这里就不再介绍了。(方波)