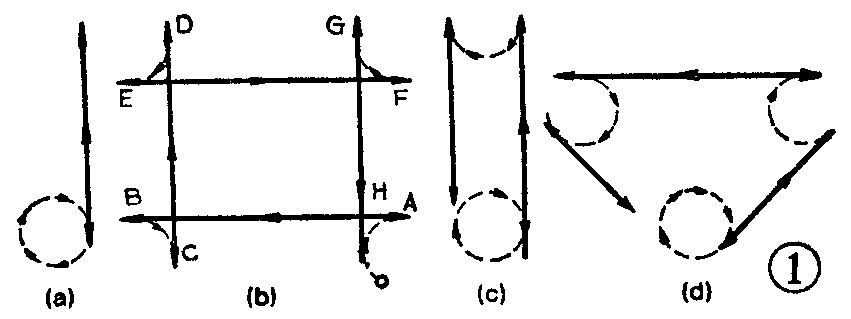
这种遥控汽车模型虽然是单通道遥控,但由于汽车的前中间轮有着特殊结构,所以能完成多方向控制,图1画出了几种典型的汽车行驶路线。图中虚线表示的是开启电源后,发射机不发信号,模型在原处后退、旋转;当发射机发信号时,模型转为直线前进。由于这种汽车模型遥控起来方便、灵活,可以完成多种多样的行走路线,所以可供几个人在预先设置好障碍的场地上进行比赛。
遥控电路原理
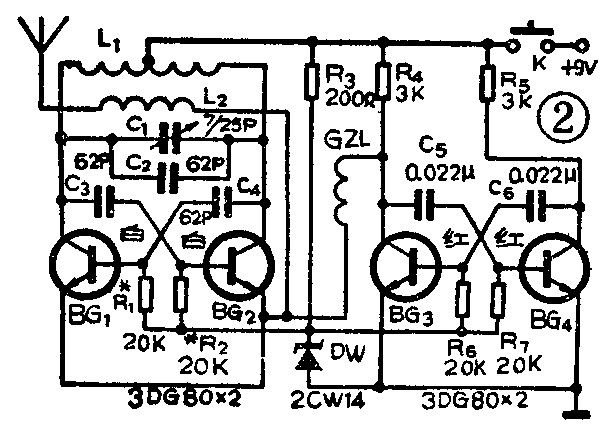
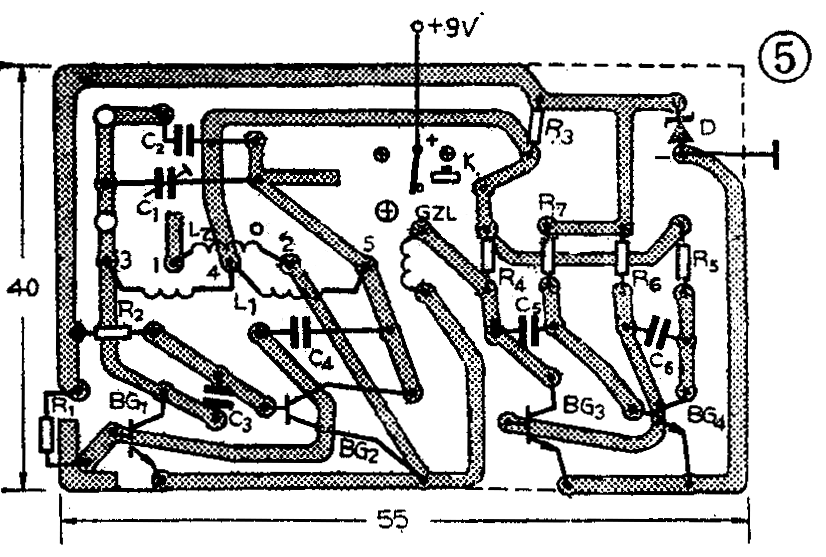
发射机 图2为发射机电路图,其中BG\(_{1}\)、BG2等组成电感三点式载频振荡器,能产生29MHz的载频信号,载频频率由L\(_{2}\)、C1、C\(_{2}\)决定,R1、R\(_{2}\)为偏流电阻,C3、C\(_{4}\)为反馈电容。晶体管BG3、BG\(_{4}\)等组成多谐振荡器,工作时,两管轮流地导通与截止,产生约为1500Hz的音频信号,音频频率主要由R6、R\(_{7}\)、C5和C\(_{6}\)决定,其中R6、R\(_{7}\)为偏置电阻,R4、R\(_{5}\)为负载电阻。为了尽可能地减少频率漂移,图中加了由R3、DW组成的稳压器,以保证各管的偏流稳定。晶体管BG\(_{3}\)既作多谐振荡器用,又作调制器用。因为当BG3导通饱和时,电源通过L\(_{1}\)、BG1、BG\(_{2}\)、GZL、BG3构成通路,给BG\(_{1}\)、BG2供电,载频振荡器工作;当BG\(_{3}\)截止时,BG1、BG\(_{2}\)对地相当于开路,载频振荡器不工作。这样,载频振荡器的振荡信号被音频信号所调制,由天线发射出去。
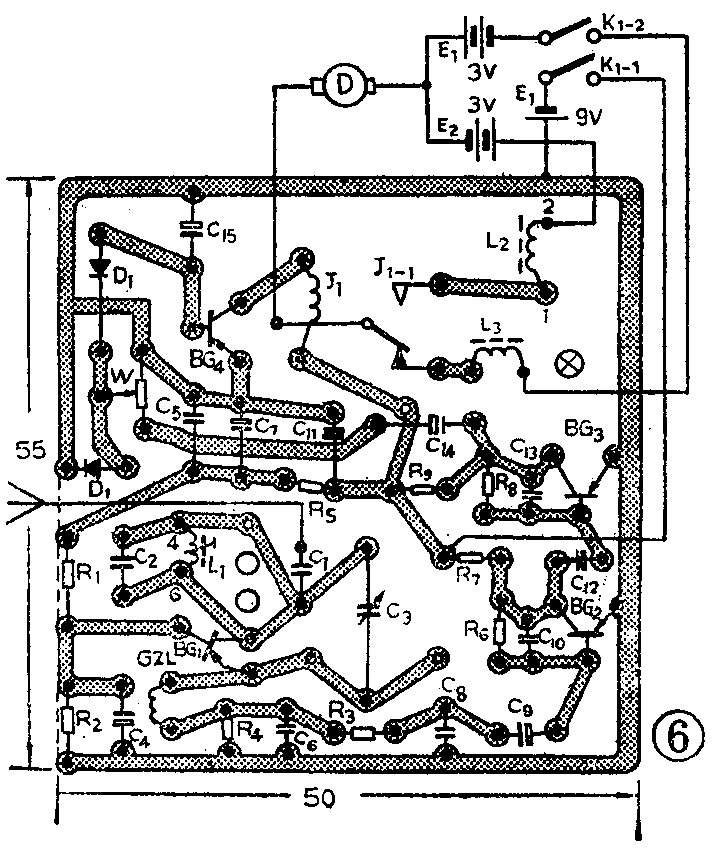
接收机 这部分电路见图3,它由超再生检波器、音频放大器和开关电路三部分组成。其中BG\(_{1}\)等组成超再生检波器,L1、C\(_{2}\)调谐回路谐振于29MHz,C3为反馈电容,R\(_{1}\)、R2为偏流电阻,淬熄电压频率主要由GZL、C\(_{6}\)、C4、R\(_{4}\)等决定。检波后的音频信号经R3、C\(_{8}\)滤波后由C9送到BG\(_{2}\)、BG3等组成的音频放大器进行音频放大。其中R\(_{6}\)、R8为偏流电阻,R\(_{7}\)、R9为负载电阻。放大后的音频信号经 C\(_{14}\)、W送至D1、D\(_{2}\)整流后,直流分流送入BG4,BG\(_{4}\)饱和导通,继电器J1吸合,其触点接通汽车模型的电机电路,汽车运行。
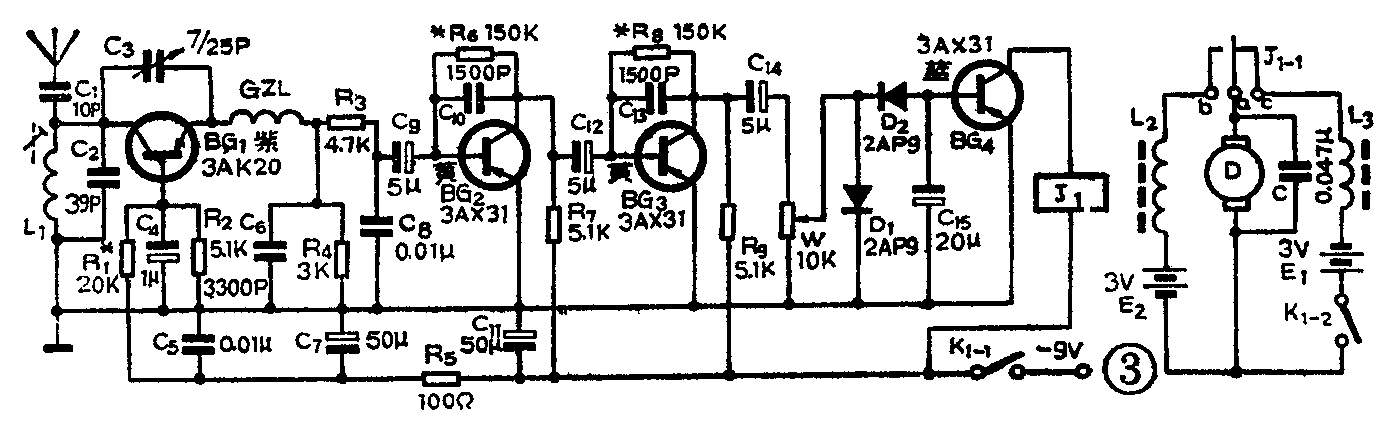
电机电路中的L\(_{2}\)、L3、C为抗电火花干扰而加的。
元器件选择与制作
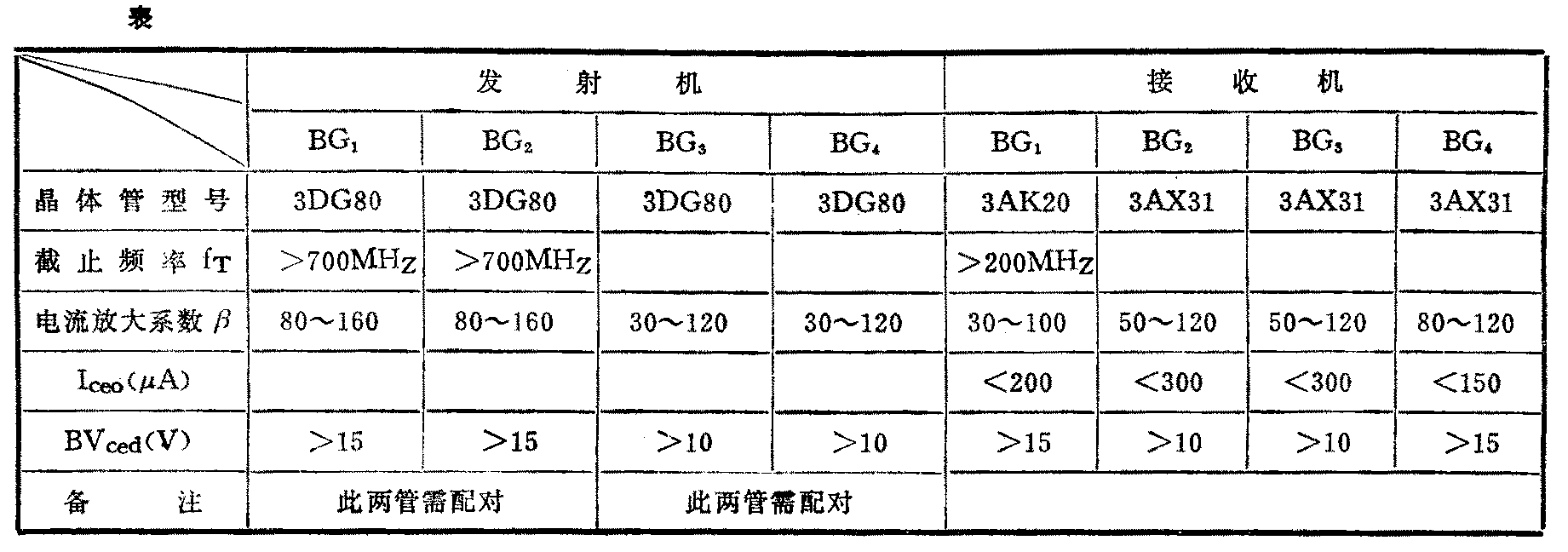
电路中的晶体管要求不高,可用一般的业余品管子,对各管的具体要求见表。
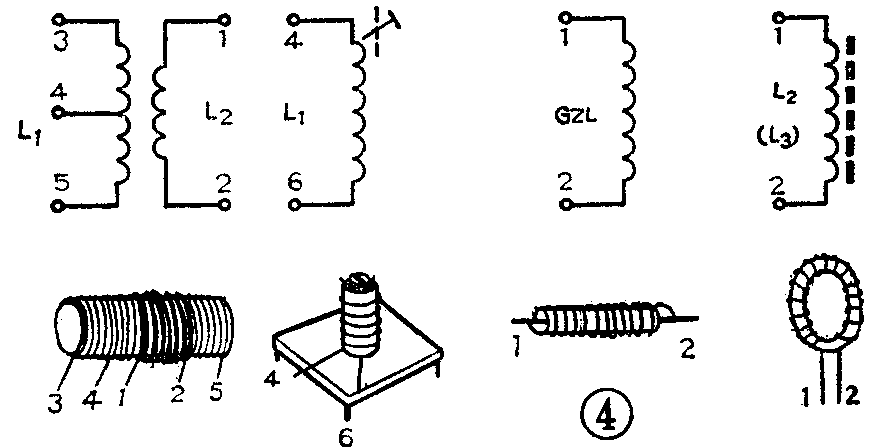
发射机的线圈L\(_{1}\)(3、4、5头之间)用线径为1mm的漆包线空心间绕8匝,中心抽头,绕好后内径为10mm,拉长为20mm;线圈L2用线径为0.5mm的硬塑包线绕3匝,嵌在L\(_{1}\)上,见图4左起第1图。接收机中的线圈L1用线径为0.15mm漆包线分三层绕8圈半,用电视机的中周骨架,磁心为NX—20—4×8,见图4左起第2图;接收机、发射机中的高扼圈用线径为0.09mm的漆包线密绕100匝,绕在1/8W、阻值为750KΩ以上的碳膜电阻上,见图4左起第3图;抗干扰电路的线圈L\(_{2}\)、L3相同,用线径为0.2mm的漆包线穿绕在MX—2000—10×6×5的磁环上,见图4左起第4图。
发射机中的C\(_{2}\)、C3、C\(_{4}\)和接收机中的C1、C\(_{2}\)、C6宜采用CLX小型涤纶电容,电阻用RTX小型碳膜电阻。继电器J用HG—9V小型电磁继电器。由于这套设备用于近距离控制,所以天线可以不必匹配。接收、发射天线均用0.3米左右长的一般电线或漆包线。
调试
发射机的调试很容易,只要元器件良好,焊接无误,偏流电阻R\(_{1}\)、R2和R\(_{6}\)、R7按图2所示的数值安装,电路都能正常工作。电路起振时,BG\(_{1}\)、BG2的集电极对地电压约为9伏,BG\(_{3}\)、BG4的集电极对地电压约为4.5伏。DW的上端对地电压约为7伏左右,整机电流为25毫安左右。以上几个数值调好以后,就可以接上天线,微调C\(_{1}\)使整机电流最小。发射机就已调好。
调接收机时,先调R\(_{1}\)使BG1发射极对地电压在-3~-4伏之间;再调R\(_{6}\)与R8使BG\(_{2}\)与BG3的集电极电流均为1毫安左右。此时用高阻耳机跨接在BG\(_{3}\)的集电极与地之间,进行监听,应听到非常明显的超噪声。若用发射机靠近接收机并发一信号,这时接收机中的耳机中应能听到这一信号。然后微调接收机中的W,在发射机不发信号时,J不吸合;而发射机发信号时,J吸合。然后再微调C3与L\(_{1}\)磁心,使超噪声最柔和,音频信号最响为止。最后再拉一下控制距离,拉距离时,发射机的可调部分不能再动,只能微调接收机中的L1磁心、C\(_{3}\)、W,使控制距离最远。
本设备在室内控制距离大于10米,若天线匹配,在开阔地带控制距离还大些。
模型部分
模型汽车底盘上的安排见图7。中间下层为四节五号电池盒和一节6F22、9V积层电池盒。上层安装接收机的印制板。后面为电动机和变速齿轮,前面为自动换向机构部分。
自动换向部分是模型的关键部分。模型汽车完成多方向行驶,主要是靠这部分。它是由导向轮、限位架、轮架等几部分组成。导向输的轮轴一端套在轮架里,作为轴心(0点),另一端在限位架内,被限位架限位后,使导向轮轴只能在0°~ 38°范围内转动,以改变汽车行驶方向。模型的两个前轮实际上并不着地,只有导向轮着地。当发射机发射信号时,接收机中的继电器吸动,电机电源接通,电机正转,带动主动轮(后轮)正转,模型汽车向前运动。这时地面对导向轮产生一个摩擦力F\(_{1}\),方向见图示, F1的作用结果使得导向轮的轮轴在0°线上,导向轮轴与主动轮轴平行,汽车模型维持向前作直线行驶;发射机停发信号后,接收机中的继电器释放,电机接到另一组电源上,电机反转,带动模型汽车的主动轮倒向运转(后退),这时地面对导向轮产生的摩擦力F\(_{2}\)的方向与F1相反,应使导向轮向前运动,但由于导向轮轴的一端被固定0点,所以轮轴只能围着0点向前作圆弧旋转,汽车原地旋转后退。
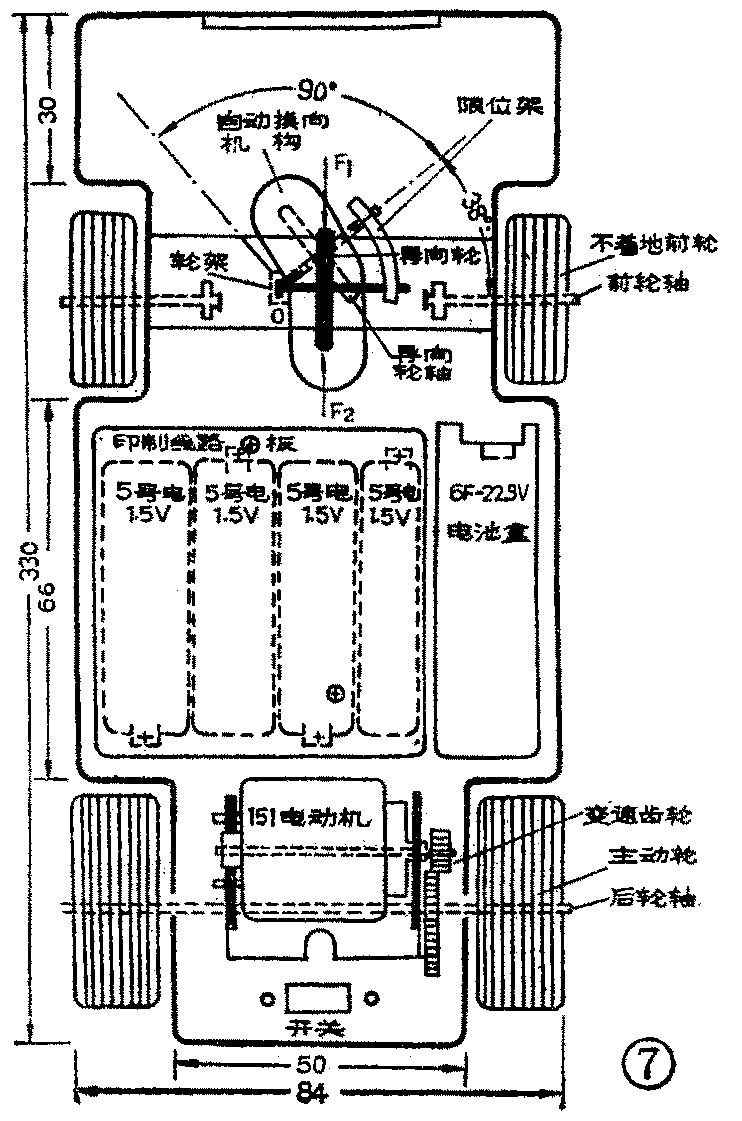
整个模型汽车安装见图7。(汤诞元)