(陈鹏飞)地板上有一只“电子米老鼠”,小弟弟拿着电筒去捉它,可是,只要电筒光一照到米老鼠头上,它就吱地一声跑开了。米老鼠跑了半个圈后自动停了下来,等小弟弟再把光照到它头上,又会跑半个圈,再停下来。
这里向大家介绍“电子米老鼠”的电路以及工作原理。
电路原理
图1是玩具的电子控制电路,它分为光电触发、动作延时和动力控制三部分。
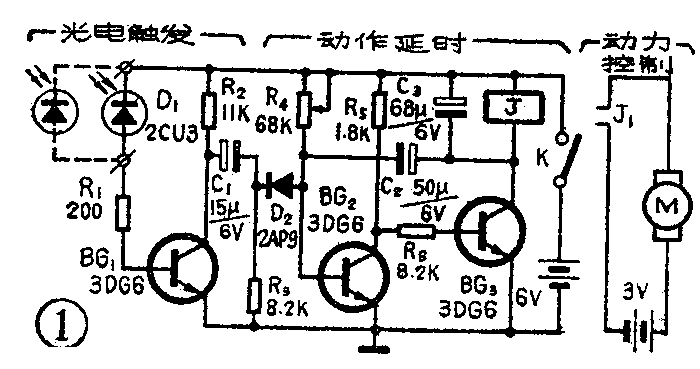
玩具的动力由电动机M提供。电动机M不转动,此玩具静止,只有当继电器J吸合,接点J\(_{1}\)接通时,电动机M才工作,推动玩具行走。
电路中晶体管BG\(_{2}\)、BG3构成“单稳态电路”。电源开始接通时,BG\(_{2}\)导通并饱和,它的集电极处低电位,BG3也因基极处低电位而截止,继电器J不吸合。这时电容C\(_{2}\)被充电,两极电位是右高左低。整个电路处于“稳定状态”。
当光敏二极管D\(_{1}\)受到光照时,它的反向电阻急剧变小,使晶体管BG1由截止变为导通,BG\(_{1}\)的集电极电压也迅速降低,相当于输出一个负脉冲。这个变化经C1和D\(_{2}\)传送到BG2的基极。BG\(_{2}\)管因基极电位突然下降,由导通变为截止,它的集电极电位即升高,通过R6的交连使BG\(_{3}\)由截止变为导通,继电器随即吸合。这个过程称为电路“翻转”。但是这种状态并不能长久保持,这是因为BG3导通后集电极电位降低,电容C\(_{2}\)将通过BG3、电源和R\(_{4}\)这样一条回路放电,电容左端电位逐渐回升,等它趋向BG2的导通电压值时即能使BG\(_{2}\)再次导通,电路又回到了“稳定状态”,继电器则因BG3截止而释放。
电路翻转后继电器吸合时间的长短,由C\(_{2}\)放电速度决定。C2与R\(_{4}\)的容量和阻值越大,继电器吸合时间就越长。
为了防止电源刚刚接通时,BG\(_{3}\)抢先导通,使继电器接点吸合抖动,在J线圈上并联一个大容量电解电容器C3。
电路制作与调整
光敏管2CU3的外形如图2,引线较长的一根是正极。用万用表可对它进行简单测试,方法如图3所示。用R×1K档测它的反向电阻,无光照时读数为1兆欧以上。用手电筒光照它顶端窗口,读数迅速下降到几十千欧甚至几千欧。如果电阻读数始终很小,光照时无变化,可能是正负极接错了。
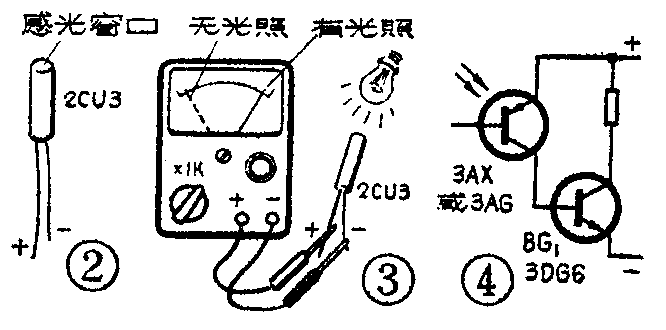
光敏管也可以用去掉管壳的3AX或3AG等三极管代替,使用方法如图4。为了防止日子长久光敏性衰退变化,最好用透明材料把管芯封起来。
电路使用的晶体管均为3DG6,选β值大一些的管子效果较好,如β在70~100之间。尤其是BG\(_{3}\)管,β值过小会使继电器动作迟钝失灵。
继电器J是上海玩具二厂出品的小型灵敏继电器,吸合电压6伏特,工作电流15毫安。若手头已有的继电器工作电流较大,BG\(_{3}\)可改用3DK4、3DG12等型号。由于继电器触点控制的电流强度较大,不宜用干簧管继电器。
控制电路耗电很少,仅几毫安到十几毫安,为减小体积和重量,可用6伏积层电池供电。
电动机M可用D—1或DZ—202型玩具电动机,由于工作电流较大,启动频繁,所以要单独用两节一号电池供电。
图5是控制电路的印刷线路图,使用继电器形状不同时要作相应修改。
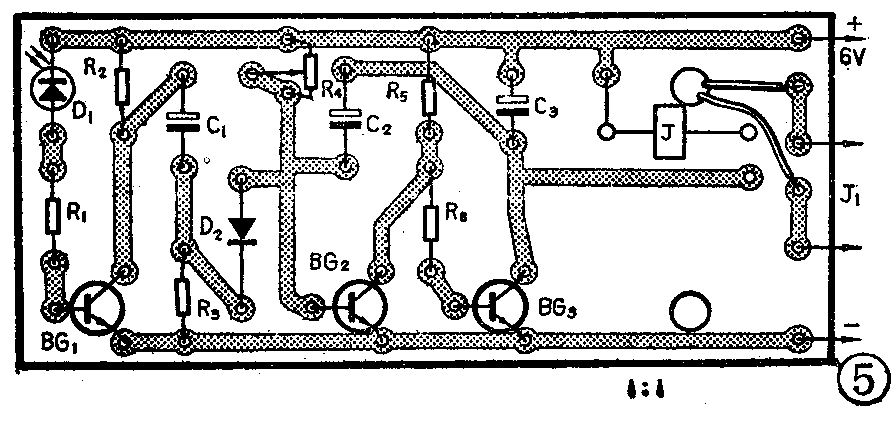
零件焊好后检查无误,就可以接通电源进行调试。正常情况下,光敏管不受光照时,继电器不吸合,电机不转。在光敏管受光照的瞬间,继电器吸合,电机转动。这时无论光敏管是否继续受光照,在一定时间内继电器将保持吸合。保持时间的长短可以通过改变R\(_{4}\)阻值调整。R4越大,保持时间也越长。但R\(_{4}\)不能太大,否则会造成电路工作不稳。若要延长保持时间,则应加大C2的容量。如R\(_{4}\)、C2按图1电路所标的数值,继电器吸合时间为3~6秒。保持时间结束,继电器自动释放,电机停止。这时需再次用光照射光敏管,电机才能再次启动。
表1
BG\(_{1}\) BG2 BG\(_{3}\)
光照前 4.6V 0.1V 6V
光照后* 0.18V 5V 0.8V
*指电路未恢复稳态的时间内
表1是各晶体管集电极电压大小及变化情况,供调试时参考。
玩具的组装
玩具的机械传动部分,结构应力求简单,也可以利用现有电动玩具改制。由于各人的具体条件和要求不同,这里不作详细介绍。
光敏管2CU3用软线从线路板上引出,固定在玩具外壳适当部位(如小动物的眼睛上),感光窗口一定要露在外面。如果希望在两三个地方都能完成光电控制,可以把几支光敏管分别固定后并联起来,相同极性接在一起。
为了缩小玩具走动范围,组装时要把前轮轴稍微装偏一点(与车身不垂直),这样可使玩具行走路线是个圆圈。