图1是一个控制电动机正转、反转和停转的电路简图。按下A钮,则继电器J\(_{1}\)接通电源,J1吸合,其一组接点便可使电动机正转(图中未画出),接点j\(_{1}\)自保。按下B钮,则继电器J2接通电源,J\(_{2}\)吸合,其一组接点便可使电动机反转(图中亦未画出),接点j2自保。接点j′\(_{1}\)和j′2分别为继电器J\(_{1}\)和J2的一组常闭接点,J\(_{1}\)吸合时,j′1断开;J\(_{2}\)吸合时,J′2断开,这样就能使J\(_{1}\)、J2互锁,保证电动机正转时,电动机反转电路不会接通,反之亦然。按动C钮,不管电动机在正转还是反转,电动机都立即停转。
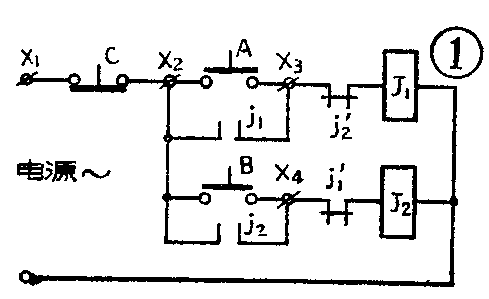
在生产实践中,操纵按钮的人往往离电动机很远,这就需要远距离控制。显然,在这种情况下,图1所示的控制电路就需要有四条导线从控制地点连到控制电路中的X\(_{1}\)、X2、X\(_{3}\)和X4四个端子(见图2)。能不能把连接导线的条数减少以节省导线呢?能!采用编码译码电路就能把四条导线减少到两条。
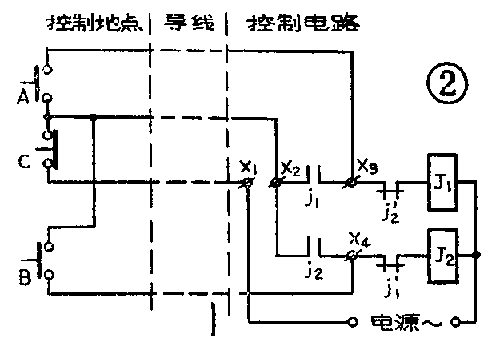
在图2所示的电路中,按钮A、B、C通过四条导线直接接通或断开控制电路的电源,也就是说,导线直接传送了控制功能。我们可以把这些控制功能(电动机正转、反转和停转)用两位二进制代码来表示。因为两位二进制代码共有四种组合状态,即00、01、10、 11,因此可以用其中三种组合状态代表这三种控制功能,这个过程就叫作编码,其编码见表1。显然,两位二进制代码,只用两条导线就能传送了。控制电路接收到代码后,再将其还原为控制功能,以控制电动机的动作,这个过程就叫作译码。下面我们来具体讨论编码译码电路的设计。
表1
控制功能 代码
(不用) 0 0
正转 0 1
反转 1 0
编码电路的设计
由控制功能可知,按钮A、B、C在同一时间内只能按下一个。若规定按下的状态为“1”。不按下的状态为“0”,则在同一时间内A、B、C只能有一个为“1”。根据这个原则可写出编码电路的真值表,见表 2。表2把控制功能、应该按下的按钮和代表这个按钮的代码都表示清楚了。例如,当需要电动机正转时,则按下A钮(A为 1),编码电路接到A钮按下的信号后,则产生用电位低高表示的一组编码0.1,于是这组编码便分头通过两条导线(Y、Z)传送到被控电路。
表2
控制功能 A B C Y Z
(不用) 0 0 0 0 0
正转 1 0 0 0 1
反转 0 1 0 1 0
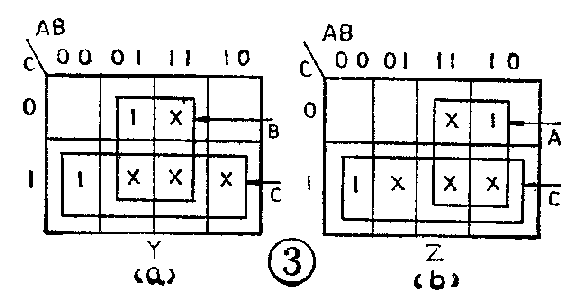
由表2可得出编码电路的逻辑表达式Y=A-BC--B-CZ=AB-C+A-B-C根据这两个逻辑表达式就可以画出编码电路的逻辑电路图。但上两式还可以化简,可采用卡诺图化简法(关于卡诺图化简法,请参阅本刊今年第三、四期),图 3a、b就是它们的卡诺图。其中A-BC-C、ABC-和ABC这四个最小项不会出现(因为没有这样的功能,即不能把两个或三个按钮同时按下),这样的最小项被称为“任意项”(也可以叫禁止项)。任意项在卡诺图上可以认为是1,也可以认为是0(参阅本刊今年第五期“八段荧光数码管译码电路的设计”一文),并用符号“X”表示。经卡诺图化简后(见图3a、b),得逻辑表达式为
Y=B+C
Z=A+C
把这两式用摩根定理加以变换,可得“与非”表达式
Y=B-C--
Z=A-C--
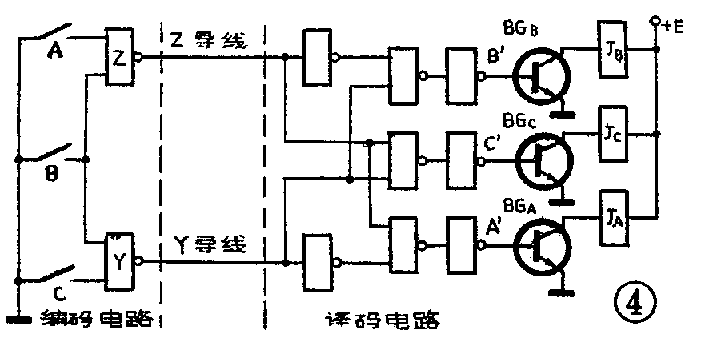
根据这两个式子画出的编码电路见图4。经编码后的远地控制开关仍用A、B、C来表示。按下A钮,就给与非门Z输入低电平,这个低电平在逻辑表达式中就用A-来表示。抬起A,就是给与非门Z输入高电平。当我们只按下A的时候出(B、 C均不按下),与非门Z输出高电平,用1表示;与非门Y输出低电平,用O表示。这时YZ两条线传输的就是一组代码0.1。按下B或C时的情况可依此类推。
译码电路的设计
在Y和Z导线上传送的二进制代码,到了控制电路以后,应将其还原成控制功能,也就是译码。根据这个原则可得出译码器的真值表,见表3,它正好与编码器的真值表相反。由表3可得译码电路的逻辑表达式(并转换成与非表达式)
表3
控制功能 Y Z A′B′C′
(不用) 0 0 0 0 0
正转 0 1 1 0 0
反转 1 0 0 1 0
根据这三个式子可以画出译码电路,见图4。其中A′、B′、C′为译码后所得到的控制信号,它们通过开关三极管去驱动继电器J\(_{A}\)、JB和J\(_{C}\),这些继电器的接点就可控制电动机的动作,因而实际上是用它们代替了图1中接在控制电路部分的按钮A、B、C。
图4电路中的整体工作过程如下:当在控制地点按下开关A时,编码电路则输出一组代码0、1,这组代码经两条导线(Y和Z)传送到译码电路,经过译码电路的变换,A′则为高电位,于是晶体管BG\(_{A}\)导通,JA吸合,而B′、C′均为低电位,J\(_{B}\)、JC不吸合,因此这时电动机正转。同理,当按下B或C时,继电器J\(_{B}\)或JC吸合,电动机反转或停转(注意J\(_{C}\)要用常闭接点),这就达到了用两条导线代管四条导线的目的。
通过以上分析说明,某些连接导线较多的远距离控制电路,采用编码、译码方式可以节省大量导线。一般说来,n条导线可以起到2\(^{n}\)条导线的作用(因为n条导线可以得到2n组编码)。例如,当n= 4时,2\(^{n}\)=24=16,这就是说,四条导线可以传送十六个信息,这在实际应用中是很有意义的。
最后需要说明,本文的目的在于介绍编码译码电路的应用及其设计方法,因此图4电路仅是原理图,实际应用时尚需考虑诸如直流供电电源、地线和长线传输时的阻抗匹配、抗干扰等细节。(杨廷善)