本文介绍的遥控机器人,是一套线路简单、制作容易、工作比较稳定的单通道遥控设备。机器人的机械部分结构轻巧、装置方便、动作灵活,能完成停、走路等动作,走路时,手臂前后摆。这套设备可供业余无线电爱好者和青少年开展科技活动时制作。
遥控部分
遥控部分包括发射机和接收机。
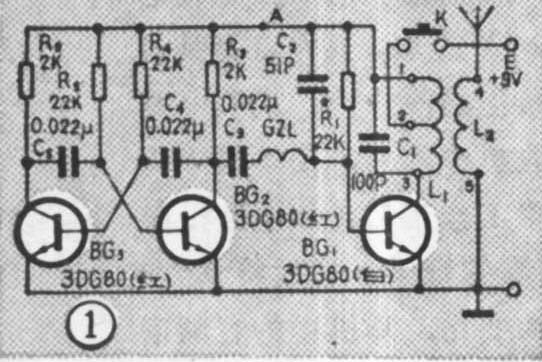
发射机 电路见图1。BG\(_{1}\)等组成电感三点式载频振荡器,其中L1、C\(_{1}\)为谐振回路,C2为反馈电容,该级能产生29.5MHz的高频信号。BG\(_{2}\)、BG3等组成多谐振荡器,能产生约为1600Hz的音频信号。音频信号经过C\(_{3}\)、高扼圈对高频振荡调制后,成为调幅波由天线发送出去。
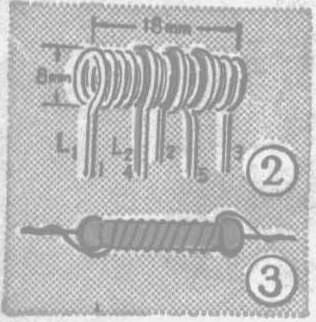
发射机中的自制元件有L\(_{1}\)、L2和高扼圈。L\(_{1}\)用φ1mm左右漆包线在铅笔上间绕12匝,脱胎后内径为8mm,拉长到18mm。L2用φ0.5mm的硬塑线在L\(_{1}\)的中间嵌绕3匝,绕好后的L1、L\(_{2}\)见图2所示。高扼圈用0.09mm的高强度漆包线在1/8瓦的碳膜电阻上密绕90匝,线头刮去漆皮后焊在电阻的引出脚上,见图3所示。
发射机的印制电路板见图4(1:1)。制作时,除了R\(_{1}\)以外,其它元器件均焊在板上,然后再进行调试。
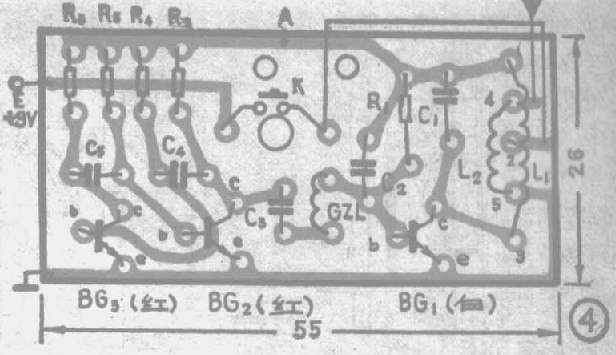
调试时,把图1中的A处暂时断开,在电源与E点之间串联一个毫安表,按下微动开关K,调R\(_{1}\),使BG1的集电极电流为20mA左右,该级能正常工作。然后再接通A处,多谐振荡器应工作。这时若用一只800Ω或1500Ω的耳塞机跨接在BG\(_{2}\)或BG3的集电极与地之间监听,应能听到“嘟嘟……”的音频信号声。若用万用表测量BG\(_{2}\)、BG3的集电极对地电压,均应为4伏左右。整机电流约为30mA左右。若把发射机天线靠近某一短波收音机的天线或电视机的天线时,收音机或电视机中应能收到发射机发出的音频信号声,在电视机的屏幕上还会出现非常显著的干扰图案。至此,发射机已初步完成。
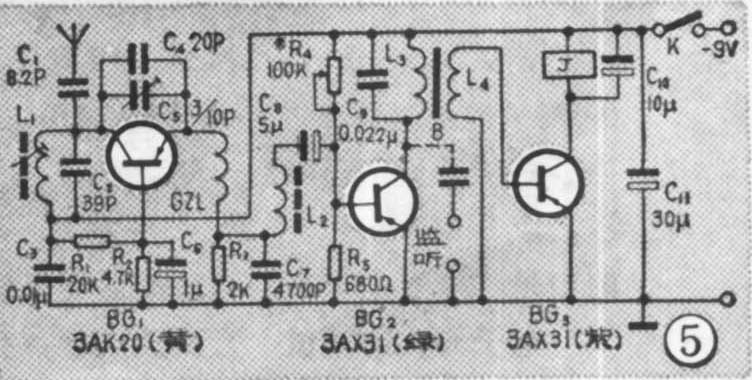
接收机 电路见图5。其中BG\(_{1}\)等组成超再生检波器,L1、C\(_{2}\)为调谐回路,其谐振频率为29.5MHz。C4、C\(_{5}\)为超再生级的反馈电容。BG2等组成音频电压放大器。BG\(_{3}\)等组成开关电路。由天线接收来的调幅波经检波后取出音频信号,经L2、C\(_{8}\)传送到BG2的基极进行电压放大,然后由变压器B耦合至BG\(_{3}\)。当此音频信号足够大时,BG3导通,继电器J吸动。
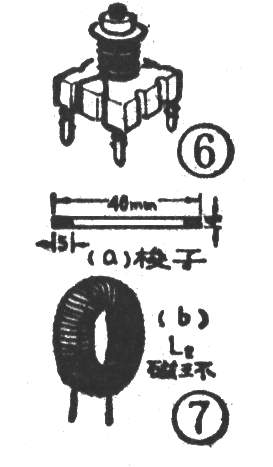
接收机中的自制元件有三个:L\(_{1}\)、L2和高扼圈。制作L\(_{1}\)时,用电视机中的10A型中周骨架,φ0.15mm漆包线顺时针密绕9匝(骨架分三层,每层绕3匝),两根线头刮去漆皮后焊在4与5两根引出脚上,绕好后的L1如图6所示。自制L\(_{2}\)时,是用φ0.09mm的漆包线在MX2000、10×6×5的磁环上穿绕350匝。另外再用废铜丝作两个引出脚,两根线头刮去漆层后焊在引出脚上,并用丝线捆在磁环上固定好,再用蜡封固。为了绕制方便,可以用塑料或竹片自制一个梭子,见图7(a)所示。绕好后的L2见图7(b)。高扼圈的制作方法与发射机同。
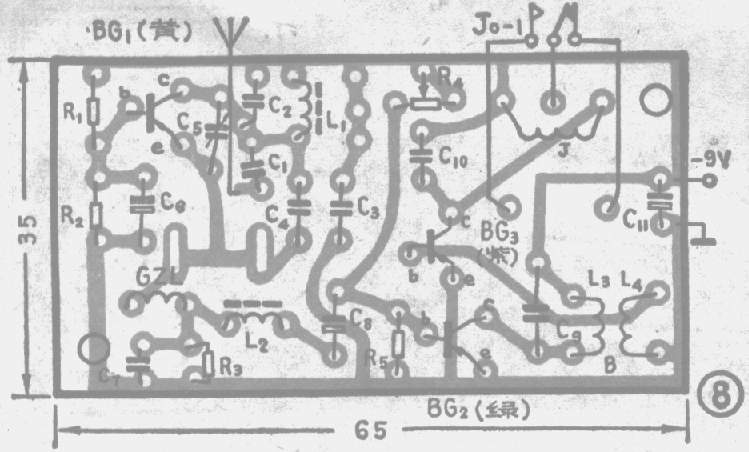
接收机的印制板见图8(1:1)。制作时,除R\(_{1}\)、R4之外,其它元器件均安装在印制板上,核对无误后再开始调试。先调R\(_{1}\)使BG1的发射极对地电压为-3V左右。再调R\(_{4}\)使BG2的集电极电流为1mA左右,此时,若用800Ω或1500Ω的耳塞机通过一个0.01μF左右的电容器跨接在BG\(_{2}\)的集电极与地之间监听,应能听到超再生检波机特有的“沙沙……”声。BG3处没有什么可调的元件。调好后的接收机整机电流在10mA左右。此时可用发射机靠近接收机并发出信号,耳塞机中的超噪声立即被抑止,听到的是一个很响亮的音频信号“嘟嘟……”声。同时继电器J吸动。当收到信号时,接收机的整机电流为32mA左右。
最后把接收机、发射机联合起来进行拉距离调试。调试时应由近到远地进行,一面微调接收机中的L\(_{1}\)磁心,一面用耳机监听,使收到的音频信号最强为止。本设备当发射机与接收机各接上0.5米软线作天线时,在空旷地区的有效控制距离可达60米左右。若发射机天线匹配(用1.5米铜管天线,再加上加感线圈),控制距离将大为增加。若在室内使用,特别是在钢筋结构的房屋内用,控制距离将大为减小。
为了便于大家调试,下面列举出了一些调试中出现的故障和排除的方法。
发射机:
1.BG\(_{1}\)中电流过大,可能是BG1击穿或管脚接错,若BG\(_{1}\)的电流调不上去,应换电池。
2.若BG\(_{2}\)的集电极电压若为9伏,BG3的集电极电压为0伏,可能是BG\(_{2}\)开路、BG3短路或管脚接错或管子击穿。
3.如果多谐振荡器的集电极电压和BG\(_{1}\)的集电极电流都是正常的,而试听时收音机中无声,靠近电视机时,屏上无干扰图案,可能是C1、C\(_{2}\)、L2开路,或者是BG\(_{1}\)的截止频率低,或者是天线没接好。若收不到发射机的信号,可能收、发两机没调谐。
若电视机上有干扰图案无音频信号,或者噪声被抑制时无音频信号,可能是高扼圈开路或短路,或者是C\(_{3}\)开路。
接收机:
1.调R\(_{1}\)时,BG1的发射极对地电压不变或太大,可能是BG\(_{1}\)管脚接错或击穿;若调R1时,电压上不去或调R\(_{4}\)时,电流上不去,可能是电池陈旧或BG1、BG\(_{2}\)开路。若调R1时,BG\(_{2}\)电流大或不变,可能是BG2管脚接错或击穿。
2.在各级电流、电压正常的情况下,若用耳机监听无噪声,可能是C\(_{4}\)、C5容量不对、L\(_{2}\)或C8开路,应调L\(_{1}\)磁心;若有音频信号,J不吸动,可能是BG3管脚接错或β低,或是B的次级开路;若收到信号,距离拉不远,可能是两机没调谐或BG\(_{3}\)的β低。
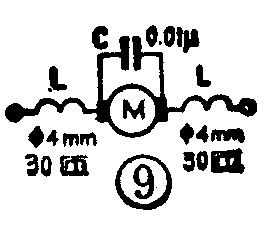
3.不带负载工作正常,接上机器人后,继电器长时间吸动,停发后J不释放。应增大R\(_{4}\)阻值,并加图9所示的抗干扰电路。
机械结构部分
遥控机器人的机械部分主要包括机身、齿轮箱(包括电动机、传动机构、从动轮)、手顶杆、电池盒、前后盖等部分,见图10所示。齿轮箱是由一副夹板、两根轴、6只齿轮和一只131玩具电动机组成,见图11。
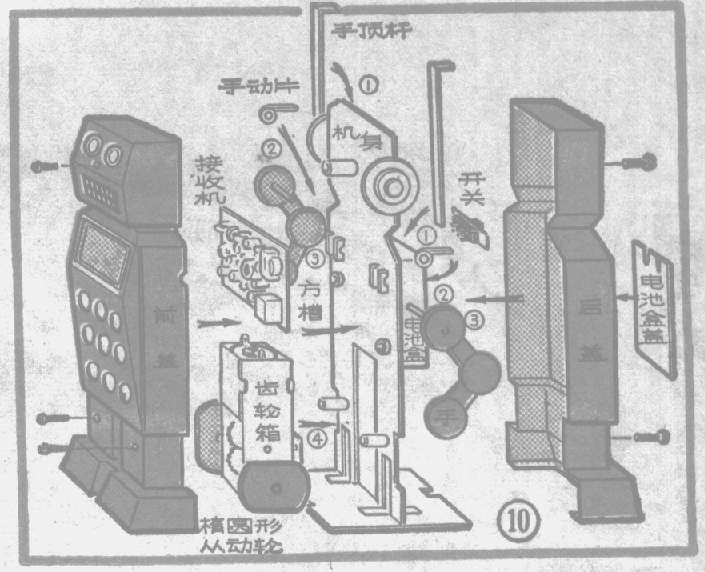
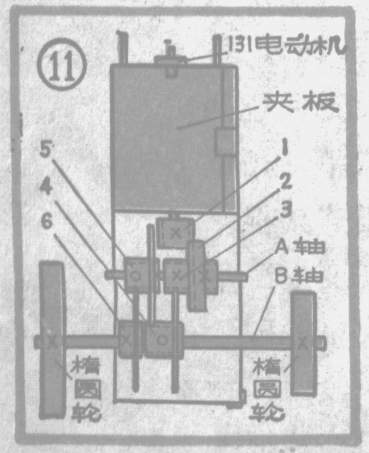
安装齿轮时,电动机轴上装齿轮①,A轴上装齿轮②、③、⑤。B轴上装齿轮④、⑥。齿轮②和①啮合、④和③啮合、⑤和④啮合、⑥和⑤啮合。由于A轴上齿轮②、③和轴是紧配合,⑤和轴是动配合,所以②、③齿轮转速相同,而不影响⑤的转速。B轴上齿轮④是动配合,齿轮⑥是紧配合,所以④的转动对⑥无影响。当给电动机接上1.5V电源时,电动机转动,带动齿轮①,由于齿轮②和齿轮①是啮合,所以齿轮②也转动。齿轮②、③、⑤是装在A轴上的,所以齿轮②带动A轴,A轴又带动齿轮③、⑤,于是又传到齿轮④、⑥。④、⑥安在B轴上,B轴转动。在B轴的两端各安一个椭圆轮,作为机器人的“脚”。由于安装时,一个轮子的长半轴平行地面,另一个轮子的长半轴垂直地面。当B轴带动椭圆轮转动时,两个轮子离地面的高度不一样,使机器人有一摇一摆的走路动作。由于手顶杆的下端须在椭圆轮上,所以椭圆轮转动时,顶着手顶杆,手顶杆向上移动,顶动手动片,手动片又顶着手臂,于是手臂有前后摆的模拟动作。这部分安装和动作原理参见图10。
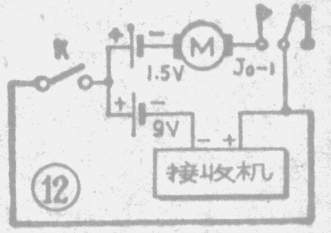
机器人的总装顺序是:1.先把手顶杆插入机身上的方槽内。2.放入手动片。3.装两手的铁丝插销(轴),使手动片紧固在轴上而手臂能活动、摆动。4.把齿轮箱装在机身上。5.按图12接线并装上开关、接收机。6.把一节2号电池和一节6F22、9V积层电池分别装入电池盒内,并接通电路。由发射机发出一信号,试一下电路,电路应正常工作。7.装上前、后盖,并用螺钉固定。为了使机器人美观,可以在机器人的外壳上涂上或贴上不同的颜色或画一些必要的图案。天线安装在机器人的头顶上。(汤诞元 倪巡)