一般的遥控模型,多是通过继电器去变换模型动作。由于继电器价格较贵,且在边远地区不易买到,为此,我们实验使用图1电路,就省掉了继电器,这种电路也能使模型(车、船)作前进、后退或者左转、右转两种动作。
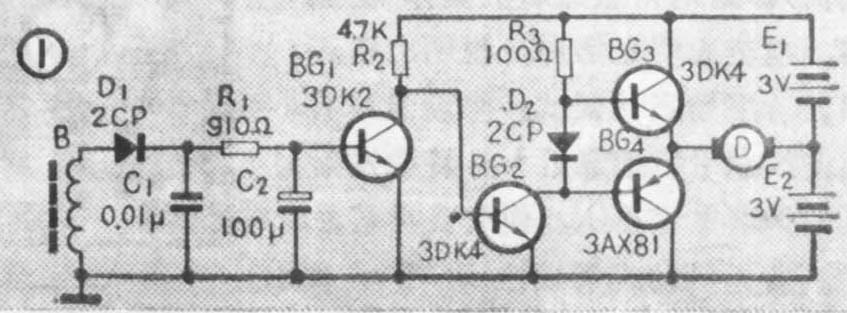
图1电路仅仅给出了接收机中检波及后面的电路,检波极前面的电路与其它接收机电路相同,制作者可根据情况自选。
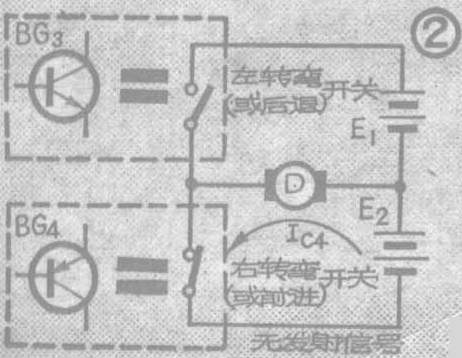
图中D\(_{1}\)为检波二极管,BG1工作在开关状态,BG\(_{2}\)、BG3、BG\(_{4}\)等组成一般的“OCL”电路,只不过负载不是扬声器而是电机。当发射机未发射信号时,接收机处于静态状态,这时无检波信号输出,BG1截止,BG\(_{2}\)导通饱和,BG3截止,BG\(_{4}\)导通饱和。电路等效为图2所示,电机由电源E2供电,电机旋转。如果我们把电机此时的旋转方向定为顺时针方向,且模型作右转(或前进)开关。
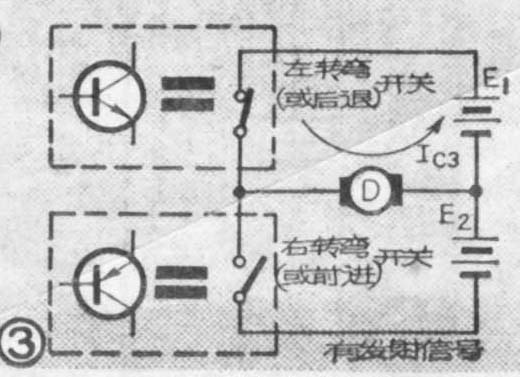
当发射机发射等幅信号时,信号经装在模型中的接收机放大、检波,就有足够高的直流电压输出,此时BG\(_{1}\)导通饱和,BG2截止。BG\(_{3}\)导通饱和,BG4截止。这时电路等效为图3,电机改由E\(_{1}\)供电。因流过电机的电流方向变了,电机逆时针旋转,作左转弯(或后退)动作,此时BG3相当于左转弯(或后退)开关。图中,电容C\(_{2}\)用来抗干扰的,把短暂的脉冲信号旁路,以免引起电路误动作。
由于这种电路只要发射机发出等幅信号就能操纵模型的动作,所以发射机电路可以大大简化。此外,模型作右转弯(或前进)动作时,发射机处于关机状态,因此发射机也省电了。
图1中的元器件无特殊要求,BG\(_{1}\)~BG4的β值大于50即可,要求各管的饱和压降V\(_{ce}\)应尽量小。电机的工作电压为1~3伏,工作电流约为50mA。
由于晶体管均工作在开关状态,因此电路调试很简单。若是元器件良好,一般安装后就能正常工作。调试时,静态的BG\(_{1}\)的Uce约为0.7伏,BG\(_{2}\)的Uce≈0.3伏,此时电机应朝一个方向旋转。然后用导线将BG\(_{1}\)的c、e极短路,相当于有了发射信号后BG1导通状态,应见到电机朝另一方向旋转。去掉短路线,电路就可投入使用。
对于发射机、接收机,读者可自行选取或设计。(陈银德)