在内蒙古自治区青少年科技作品展览会上,一台声控机器人听到哨音后,就眨眼、行队礼、摇头、念解说词,挥动讲棍、作手势。它的精彩表演,吸引着广大观众。机器人的这一系列动作都是受“电脑”控制的,下面对这台机器人作一简单介绍。
电路原理
机器人的“电脑”由声控开关电路、程序控制电路等组成。声控开关电路相当于机器人的“听觉”,是用以分辨哨音指令信号的;程序控制电路用来控制机器人完成各种动作;音频放大电路连同录音机组成机器人的“语言系统”,负责说话。“电脑”电路见图1。
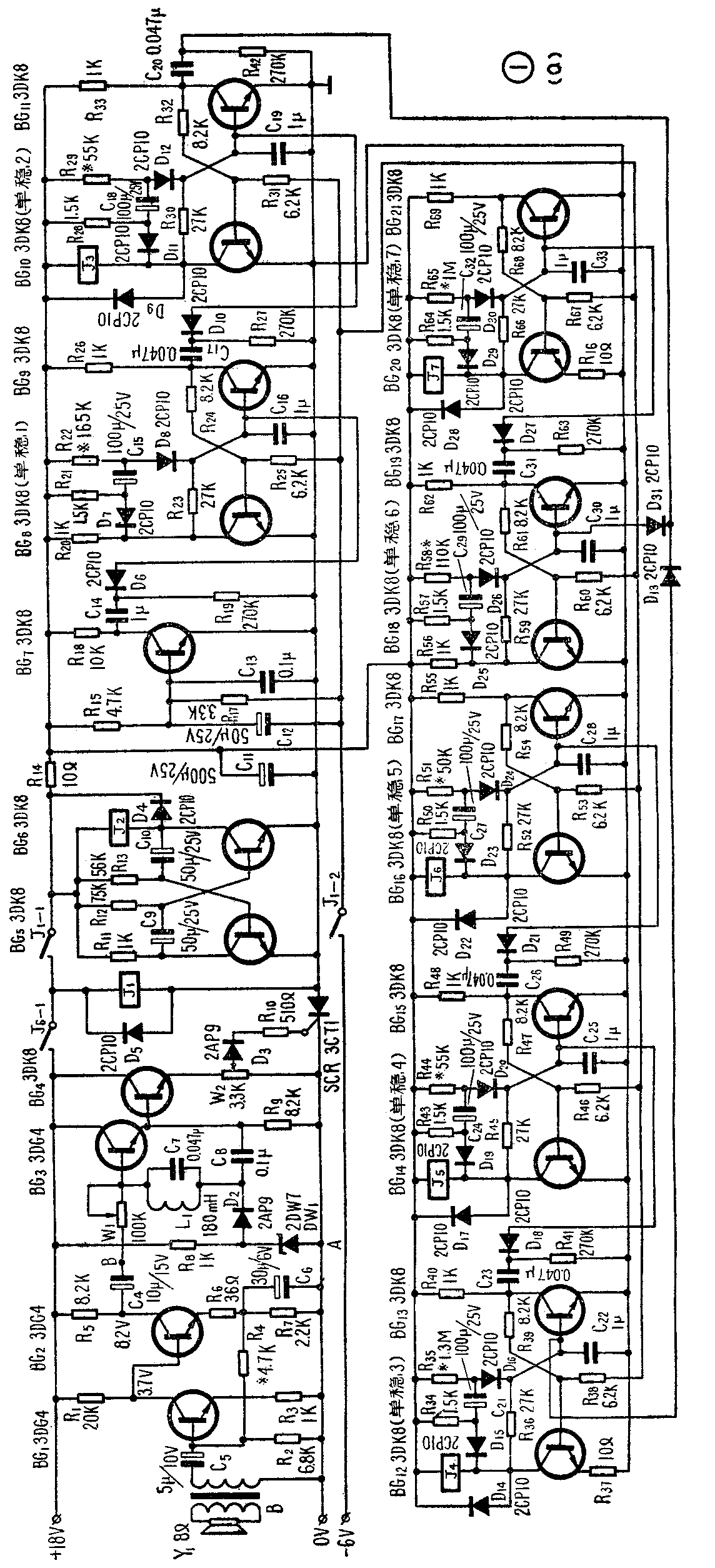
声控开关电路我们采用频率为1700Hz左右的普通金属哨的哨音作为声控信号。当话筒(用喇叭代替)接收到哨音信号后就变成相应的电信号送至由BG\(_{1}\)、BG2组成的音频放大级放大。放大后的音频哨音信号送到L\(_{1}\)、C7选频网路。由于L\(_{1}\)、C7组成并联谐振电路,谐振频率为1700赫,所以只有哨音信号才能通过选频网路送到下一级,而其它频率的干扰信号则被有效地抑制,以免引起机器人的误动作。
选出的哨音信号经二极管D\(_{2}\)半波整流后,加在由BG3、BG\(_{4}\)组成的射极输出直流放大器的输入端。稳压管DW1主要起箝位作用,以进一步提高放大器的输入电压、使射极输出级电压有一个有效的动态范围,可靠地触发可控硅导通。
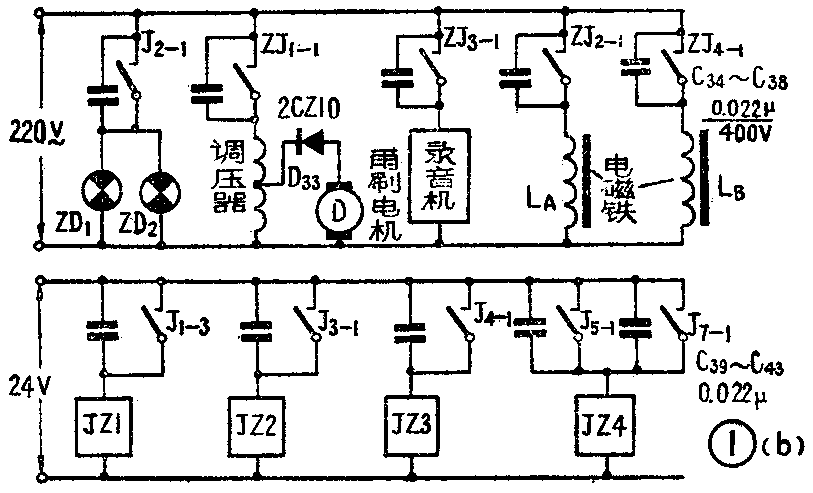
可控硅导通后,J\(_{1}\)绕组里有电流;它的常开触点J1-1、J\(_{1}\)-2闭合,接通程序控制电路、音频放大电路的电源;它的常开触点J1-3闭合,接通了中间继电器ZJ1绕组的电源,中间继电器吸动,其触点ZJ\(_{1-1}\)接通了摇头用的电机的电源,电机运转,通过机械传动机构,带动机器人摇头。
程序控制电路 它是由自激多谐振荡器、启动级、长延时单稳态电路组成。
BG\(_{5}\)、BG6组成自激多谐振荡器。J\(_{1}\)-1、J1-2接通电源后,多谐振荡器便开始工作,BG\(_{5}\)、BG6轮番导通与截止。当BG\(_{6}\)导通时,继电器J2绕组里有电流,继电器J\(_{2}\)吸动,它的触点J2-1闭合,接通小灯泡ZD\(_{1}\)、ZD2的电源,灯泡亮。小灯泡就是机器人的“眼睛”。由于BG\(_{6}\)的导通与截止是间断的,所以小灯泡时亮时灭,就像机器人会眨眼似的。眨眼时间的长短取决于R12、R\(_{13}\)、C9、C\(_{1}\)0的数值。
BG\(_{7}\)等组成启动级。当继电器的触点把电源接通后,电源通过电阻R15给电容C\(_{12}\)充电,当 C12充电到一定程度时,BG\(_{7}\)导通。BG7从截止到导通,它的集电极输出一个阶跃信号,经微分电路C\(_{14}\)、R19微分后,变为一个负脉冲,该负脉冲作为触发信号加到下一级单稳电路。
单稳电路共有7组(BG\(_{8}\)~BG21),各单稳电路的作用示于图2中。单稳态电路的工作原理本文不再赘述,我们主要谈谈这部分电路的程序控制过程及机器人的动作。
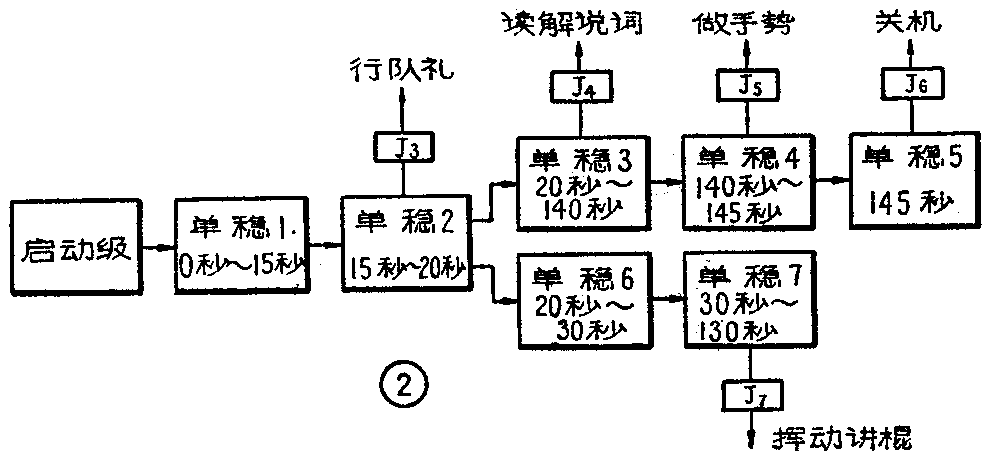
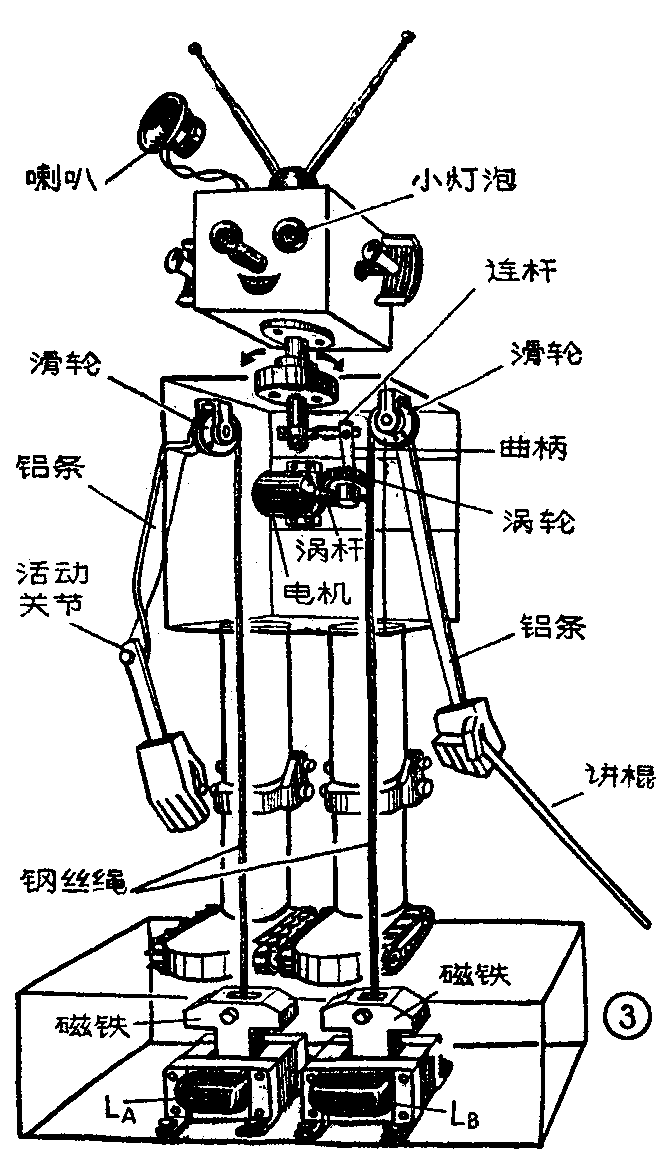
第1个单稳电路主要用来得到约15秒的延时时间,在这段时间里机器人作眨眼、摇头动作。延时15秒后,单稳态1输出一个触发信号触发第2个单稳电路,于是继电器J\(_{3}\)吸动,其触点接通中间继电器JZ2的电源,JZ2吸动,它的触点又接通线圈LA的电源,L\(_{A}\)里有电流通过,吸动对应的电磁铁,见图3中所示,电磁铁向下,通过钢丝、滑轮带动机器人的右臂举起,当举到接近头顶时,由于重力作用,右手就以活动关节为轴,小臂自然下落,成行队礼姿势。这个动作持续5秒,单稳态电路2复原,又输出触发脉冲分别加到第3、第6个单稳态电路。
第3个单稳电路被触发后,J\(_{4}\)吸动,通过中间继电器JZ3接通录音机电路,录音机放解说词,解说词约放2分钟。第6个单稳电路主要起延时作用,取得约5秒的延时时间后,输出的触发脉冲去触发第7个单稳电路。第7个单稳电路被触发后,J7吸动,通过中间继电器,又使线圈L\(_{B}\)中有电流通过,电磁铁被拉下,通过钢丝、滑轮使机器人左手臂举起。由于此时还在放解说词,就好象机器人一边讲话,一边挥动讲棍。单稳态7延时100秒后,电路复原,机器人左手臂放下。
放完录音,单稳态电路3复原,输出脉冲触发第4个单稳电路,这时J\(_{5}\)吸动,通过中间继电器左手臂又再一次举起,像作再见的手势。单稳4只延时5秒,又复原,左手臂放下。输出的脉冲触发第5个单稳态电路,J6吸动,它的触点J\(_{6}\)-1断开电路电源,程序控制电路便停止工作,机器人至此完成了一套受程序控制的动作。
元器件的选择与制作
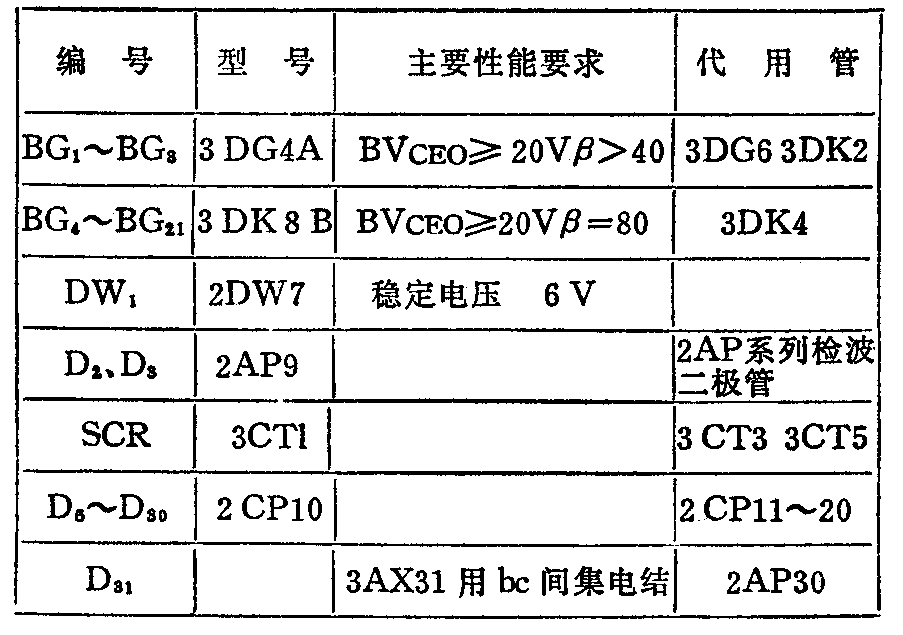
晶体管的要求见表。阻容元件见图中所标注的数值。程序控制电路中的电容C\(_{15}\)、C18、C\(_{21}\)、C24、C\(_{27}\)、C29、C\(_{32}\)容值要准确。
B\(_{1}\)用晶体管收音机输出变压器。L1选用MX—2000.φ10×φ6×5规格的磁环,用直径为0.07mm高强度漆包线穿绕550圈左右,测得电感量180mH。如果没有测电感的仪器,可在550圈左右位置多留出几个抽头,以便调试时用来改变电感量。配上电容C\(_{7}\)后,回路谐振在1700Hz频率上。
继电器J\(_{1}\)~J7选用JR—3型继电器,也可以选用内阻为1KΩ左右、吸合电流小于25mA的其他小型继电器。为确保电路中先接通-6V电源,用尖咀钳夹住J\(_{1}\)-2接片的中间部位稍弯一下,这样J1吸动时,J\(_{1}\)-2比J1-1就先接通。中间继电器JZ1~JZ4可根据各执行机构的用电情况自行选取电源用有6V、18V两组输出的稳压电源。
机器人摇头用的是雨刷器结构,当雨刷电机转动时,带动其上的涡杆转动,涡杆又带动涡轮,涡轮上的曲柄通过连杆、摇臂使机器人摇头。
为了使机器人手臂动作可靠,一是选用电磁铁的拉力要大于15公斤;二是机器人的两臂要选用轻质材料制作,我们用的是铝质材料,周围用泡沫塑料裹住,外面再用银色涤纶纸包上作装饰,手掌选用硬泡沫塑料。
为了防止电磁干扰,电路部分与继电器之间要用薄铜片隔离屏蔽。元器件焊在印制板上,并把印制板、继电器等装在金属盒里,金属盒接地。
机器人的大小可以自己选取。我们把电路与机器人分开放置。以防电磁干扰和机械振动对电路产生影响。机器人的安装见图3。
调试
声控开关电路的调试。先断开J\(_{1—1}\)、J1—2,调R\(_{4}\),使BG1、BG\(_{2}\)的集电极电压分别为3.7V、8.2V。用万用电表10V档跨接在C2与W\(_{1}\)的连接点B点与A点之间,当吹哨时,表针应摆至5V左右,哨音一停,表针应迅速摆回至零点。然后在继电器J1两端并联三只串接的6.3V小灯泡作为假负载,接通电源后,BG\(_{3}\)、BG4两管的发射极电压应分别为5.1V和4.4V左右。调W\(_{1}\)至中间位置,调W2使可控硅控制极电压低于0.2V,可控硅控制极电压上升至2.5V左右时导通,小灯泡亮。如果此时控制极电压大于2.5V,应加大R\(_{1}\)0的阻值使它维持在2.5左右。最后检查声控灵敏度,离开3~5米吹哨,可控硅导通,灯泡亮。若大声说话时,可控硅也导通,应将W1适当增大;如吹哨子后,可控硅不导通,可减小W\(_{1}\),若W1减到最小,可控硅仍不导通,可适当调换L\(_{1}\)的抽头或改变C7,调准谐振频率为1700Hz。
调程序控制电路时,先接通18V电源,再调多谐振荡器。用万用表测量BG\(_{5}\)或BG6的集电极电压,若集电极电压随着振荡周期的变化时而为0.7V,时而为18V,说明电路工作正常。选取R\(_{13}\)=56KΩ,R12=75KΩ,大约每4.5秒机器人眨眼一次。
启动级电路一般不用调整都能正常工作。
单稳态电路基本相同,我们以单稳1为例来说明电路的调试。在稳态时,BG\(_{8}\)截止、BG9导通,用万用表测量BG\(_{8}\)的集电极电压接近18V,BG9集电极电压接近OV。然后用正表笔接地、负表笔接在BG\(_{8}\)的基极,表针指示应约为3.8V。如果超过4.2V,应调整R25使BG\(_{8}\)的基极为3.8伏,以保证触发信号来时,电路翻转。由于单稳态电路的暂态持续时间即机器人作动作的时间由R22来控制,由计算得出,R\(_{22}\)每增加11KΩ,暂态持续时间就延长约1秒钟。根据这个规律,通过选取合适的电阻数值,就可决定机器人的各动作持续时间。
当暂态持续时间超过1分钟时,电路就不很容易翻转,为此,在带继电器的晶体管的发射极处接一只10Ω电阻,以提高发射极电位,促使电路翻转。
各电路的稳态调好以后,接通启动级输出,按图2的设计要求,检查各程序电路的控制情况。以上调试是在不接负载情况下进行的。
关于音频放大电路本文就不再介绍了。
各部分电路调好后,就可以进行综合调试。调整时先将声控电路断开,接通程序控制电路的电源,机器人应能按着设计要求动作。如果动作不协调,可调控制暂态持续时间的电阻。如果有误动作,可能屏蔽差。最后接上声控电路,调整一下声控灵敏度。
为了使录音机准确地受程序电路的控制,且尽量减少手工操作(如倒磁带),我们将1分钟的解说词在同一磁带上录制20余遍,两遍间间隔为20秒,这样只要将单稳3的暂态持续时间调到80秒,就可以使录音带连续放20遍解说词。为了使程序控制电路的控制时间与每遍录音磁带放音时间同步,可在磁带第一遍解说词前空出一段磁带(约10秒钟),并作上记号,使用时将磁带调到作记号处,就基本同步了。(苏和)