步进式顺序控制器的控制单元主要有:步进器、步进脉冲整形放大电路、多“1”检测电路、跳选电路、放大器和电子延时继电器、计数电路及显示电路。
顺序控制器的核心——步进器
前面已经谈到,步进器的作用,是根据转移信号实现自动移位,从而使电源给应该动作的继电器送电。环行计数器可以实现步进功能。在我们试制的步进式顺序控制器样机中,采用了由D触发器组成的环行计数器。环行计数器中D触发器的个数,就是步进器的位数,由控制的工艺过程有多少步决定。
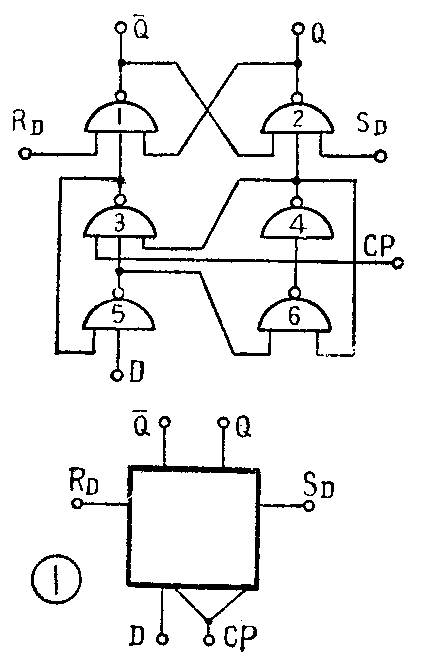
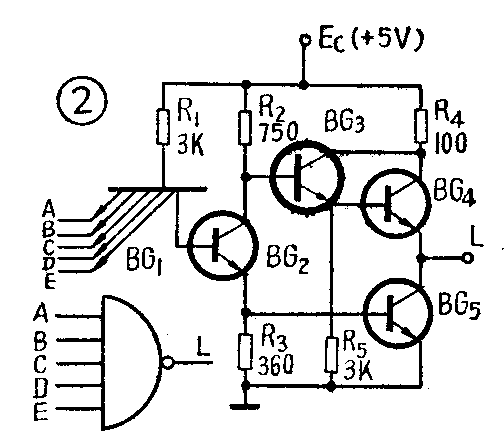
D触发器 本机中的D触发器,由六个TTL与非门组件组合而成,如图1所示。TTL与非门的内部结构见图2,输出和输入间的逻辑关系是L=A·B·C·D·E-。它的输出高电平约3.2伏,低电平约0.3伏,抗干扰能力较低,约0.5~1伏。TTL与非门工作原理可参阅本刊今年第5期《基本逻辑电路浅介》一文。下面介绍D触发器的功能特点:
1.Q和Q-的电位状态始终相反,Q为“1”(高电位)时,Q-为“0”(低电位);Q为“0”时,Q-为“1”。这主要是因为构成D触发器的与非门1和2是交叉联结的。我们把Q端为“1”的状态,称为D触发器呈“1”状态,反之为“0”状态。
2.触发器可以置“1”、置“0”:不论触发器原来状态如何,在S\(_{D}\)端接一下“0”,可使触发器置“1”;在RD端接一下“0”,可使触发器置“0”。我们称S\(_{D}\)端为置“1”端,RD端为置“0”端。它们平常处于高电位或悬空。
3.在触发器的控制端——D端接“1”,当CP端来一个脉冲(高电位)时,不论触发器原来处于什么状态,都将变为“1”状态,即Q端为“1”。反之,在D端输入为“0”时,CP端来的脉冲将使触发器呈“0”状态。此外,在CP端出现的脉冲完成上述触发过程后,如果脉冲没有消失,则D端输入信号发生的变化,对触发器并没有影响。
D触发器所以具有这种功能,主要是由于构成D触发器的与非门3~6,组成了导引电路。导引电路在D端输入信号控制下,能正确地把CP端来的脉冲引入到应该触发的一边。例如,我们在D端接“1”,R\(_{D}\)、SD均接高电位,当CP端没有来脉冲,处于低电位时,与非门5输出为“0”,与非门6输出为“1”。这样,CP端来的脉冲便不能使与非门3的输出改变(与非门3被“封锁”了),而只能使与非门4的输出变为“0”,最后导致Q端为“1”。同时,与非门4的输出“0”又把与非门3和6封锁,所以,即使D端输入信号发生了变化,也不能改变触发器的状态。只有在CP端脉冲消失后,才使D端输入信号有控制作用。
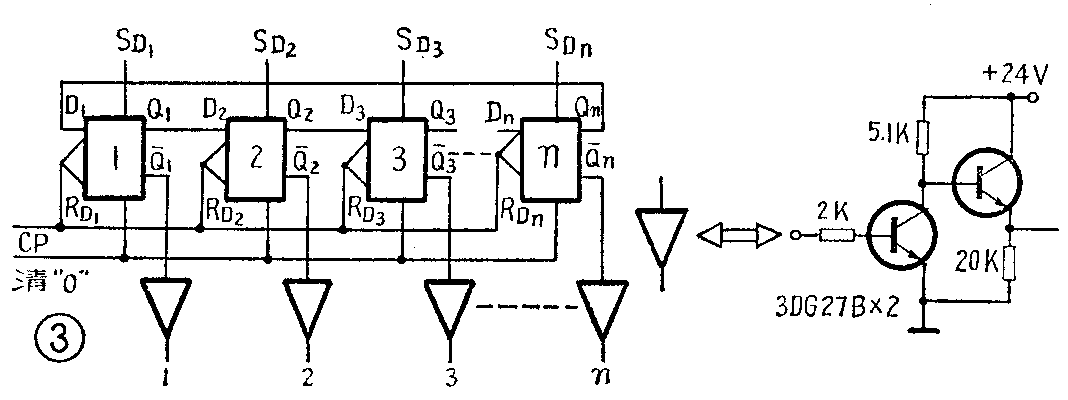
步进器的构成 把n个D触发器按图3联结,就构成了n位步进器。联结特点是:每位D触发器控制端(D端)接在前一位触发器的Q端,第一位触发器的D端与最后一位的Q端相接;所有的置“0”端(R\(_{D}\))接在一起引出,作清“0”线;所有的置“1”端分别引出,作置数用;在每位的Q-端均接一个单管晶体管反相放大器,作步进输出,这样每位输出不但和该位Q状态相同,而且可以转换为较高电压及带较大负载。上述联结方式,一位扣一位,犹如一个环,所以也叫做环行计数器。
步进器工作原理 开始先把清“0”线接一下地后松开,然后把第一位的S\(_{D1}\)接一下地。那么,步进器中将只有第一位有输出,Q1和D\(_{2}\)端为“1”,其它各位D端都为“0”。
这时,如果CP端来一个脉冲(步进脉冲),显然Q\(_{2}\)将变为“1”,即第二位有输出。D3和Q\(_{2}\)相连,也为“1”;其它各位D端都为“0”。这个CP脉冲作用的过程,使得第一位的“1”移到第二位上去了。
依此类推,CP端每来一个脉冲,步进器就向前(向右)移一位。到最后一位为“1”时,第一位的D端变为“1”了,若再来一个CP脉冲的话,将恢复到第一位为“1”的状态,步进器完成了一个循环。上述步进器前一位为转移到后一位创造条件的作用,体现了步进式顺序控制器的控制思想。这种步进器的特点是:可分别置“1”,同时清“0”,每接收一个步进脉冲向前(即向右)移动一位(移动时间是与非门翻转时间,为毫微秒数量级)。分别置“1”,是为满足各种不同情况下的启动要求;同时清“0”,是保证停机时各位状态的统一;步进脉冲到来时自动移位,满足了步进控制的要求。
步进器也可以用“JK触发器”组成。
步进脉冲整形放大电路
在本文“设计思想”一节中介绍过,步进器各位输出依次接在矩阵板各条行母线上;步进脉冲的发出,是靠行母线上的高电位(约20伏)和相应的输入信号共同决定的。为了把这个20伏左右的脉冲电压变为步进器需要的电平(约3伏),同时使脉冲有足够宽度和较陡的前后沿,保证D触发器可靠翻转,也为了使脉冲功率足以触发步进器中那么多位D触发器,必须有步进脉冲整形放大电路。
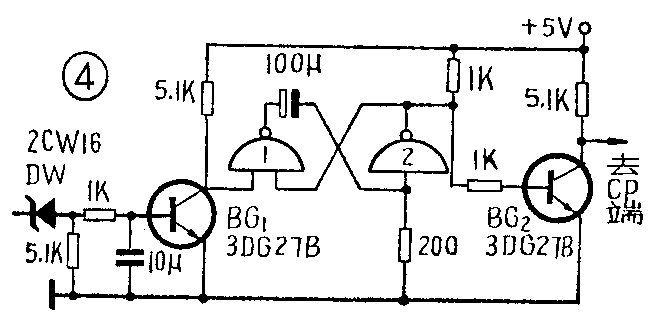
整形放大电路如图4所示。BG\(_{1}\)作电平转换。由两个与非门和电阻(200欧)、电容(100微法)组成的单稳态触发器作整形。BG2作功率放大,其集电极输出接至步进器CP端。BG\(_{1}\)管前面的稳压管及电阻、电容是为提高抗干扰能力加的,一来提高了门限电平,二来可去除高频尖脉冲的影响。
下面介绍单稳态触发器的工作原理。稳态时,由于与非门2输入端接的电阻阻值很小,输入短路电流在电阻上产生的压降很小(约0.3伏),使与非门输入为“0”,输出为“1”;对与非门1来说,则因它的输入为“1”而输出为“0”。当与非门1的输入端触发脉冲负跳变到来时,输出由“0”变为“1”,因电容两端电压不能突变,与非门2输入也为“1”,输出就变成了“0”,触发器翻转为暂稳态。此后,电容C充电,充电过程保持与非门2输入为“1”,输出为“0”。充电过程结束后,与非门2的输入又变成“0”,电路翻转成稳定状态。调节电阻及电容的大小,可改变电容充电时间,也就改变了与非门2输出脉冲的宽度。图4电路中,考虑继电器触点吸合抖动过程为十几毫秒,设计脉冲宽度为20毫秒。
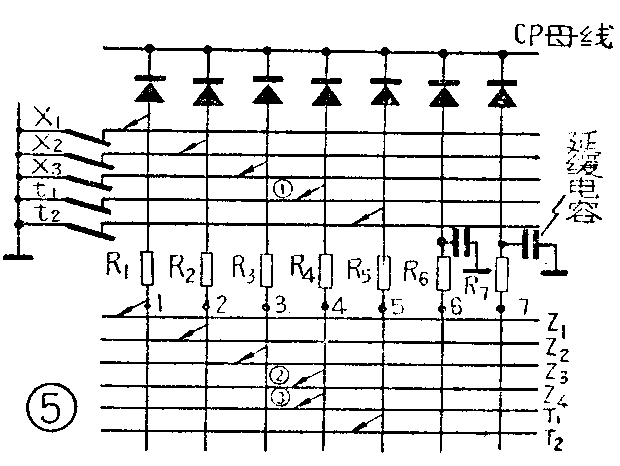
还有一点顺便加以说明。有时实际控制步数少于步进器位数,那么只要不在输入矩阵中多余行母线上插二极管,行母线高电位窜向CP母线就没有约束条件,步进器就会迅速地移下去,直至有约束条件的那一位为止(一般是回到初始位置)。但在多余位行母线上,还要加一个延缓电容,见图5,目的是使前一位移至后一位时,CP母线上不会总是高电位,引起整形电路不翻转。图5中第六、七位是多余位,当反映第五步动作完成的信号t\(_{2}\)到来时,第五位高电位窜上CP母线,经整形电路产生宽度为20毫秒的脉冲。但由于第六位没有约束条件,CP母线瞬间又成为高电位,而此时单稳态触发器还没有完成前一个脉冲整形。这样就不能很好地产生间隔的步进脉冲,使步进器正常地移去多余位了。加了延缓电容,情况就不同了:当第五位移到第六位时,第六条行母线上的高电位要通过R6对延缓电容充电,直至充到延缓电容上的电压大于二极管正向压降及图4中稳压管稳压值之和时,整形放大电路才能再次工作。显然,只要延缓电容充电的时间,大于单稳脉冲宽度,单稳态触发器就能产生完好的有间隔的脉冲。
多“1”检测电路
多“1”检测单元的功能,是当步进器出现多于一位的“1”时,自动清“0”,并发出报警信号。这种故障主要是由于误操作及瞬间停电造成的。这一部分电路如图6所示。
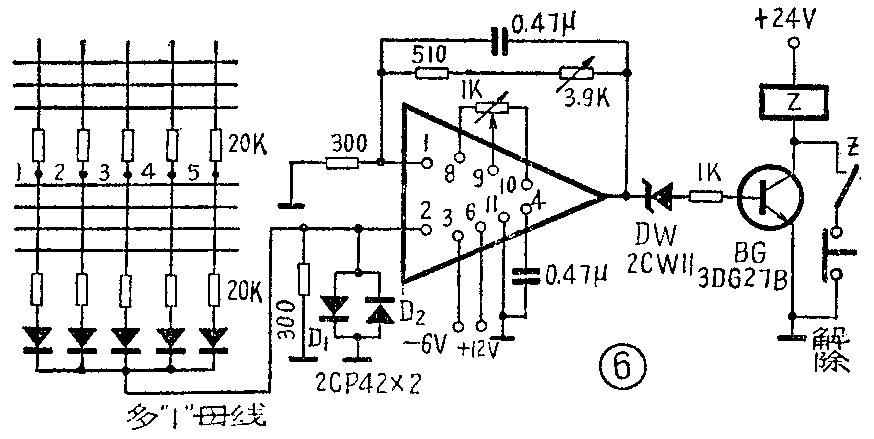
图6中,输出矩阵下面的一排电阻和串联的二极管,接到多“1”母线上。步进器正常工作时,只有一位是“1”,多“1”母线中只有1毫安左右电流流出。如果步进器同时有几位都是“1”,那就会有几毫安电流从多“1”母线中流出了。根据这个特点,我们利用同相输入的运算放大器(BG301线性组件)进行检测,并控制报警继电器Z动作。多“1”母线中的电流在300欧电阻上的压降送到同相输入端2。调整运算放大器的放大倍数,使它在输入信号为0.3伏时(对应于多“1”母线中只有1毫安电流),输出小于稳压管DW击穿电压;输入大于0.3伏时,输出大于DW的击穿电压,使三极管BG导通,继电器Z动作。用Z的一个常开触点作步进器清“0”,另一个触点引出用来报警,就达到预期目的了。
运算放大器的工作原理,本文不详细介绍了,只指出一点:它的放大倍数可以很方便地通过改变图6中可变电阻阻值的办法调整。D\(_{1}\)、D2起保护作用。
加了多“1”检测电路后,不但使用可靠安全,不怕误操作,而且可以避免因步进器失灵造成事故的危险。
跳选功能的实现
跳选功能是指控制器在满足一定条件时,能一下子跳过几步不作,然后再顺次工作。由单稳态触发器等组成的跳选电路和与步进器相接的跳选矩阵,用来实现跳选功能,见图7。基本思想是:从输出矩阵中取出跳选信号,经反相放大器BG1反相放大后,对步进器清“0”。同时,此反相放大器的输出信号还控制单稳态触发器,单稳输出又经反相放大器BG\(_{2}\)接到跳选矩阵的横线上。因为跳选矩阵的竖线接在步进器条位D触发器的置“1”端,所以可以任意安排二极管,使某位置数而重新开始工作。
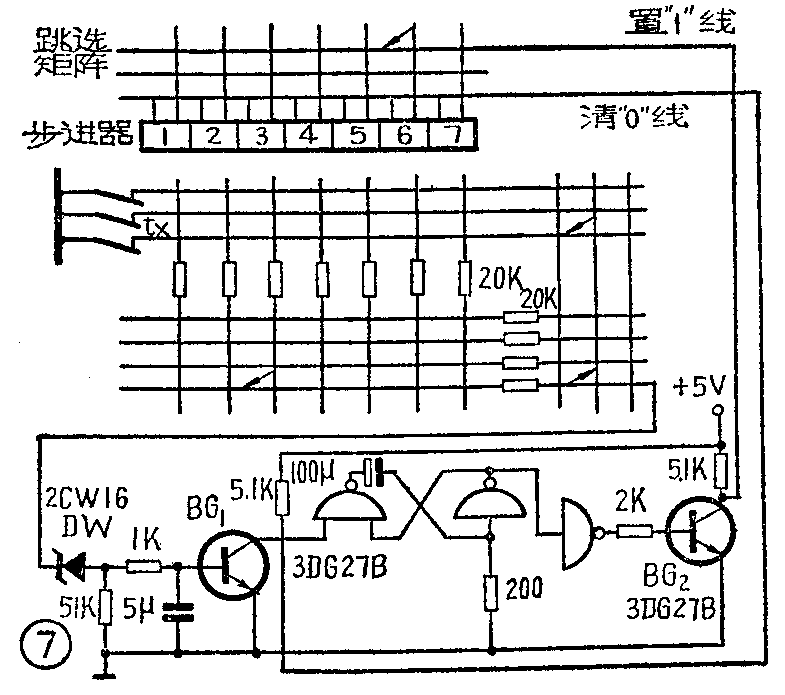
图7中,接入四个二极管。当步进器进到第三位时,如果要求跳选,t\(_{x}\)打开,跳选信号线便有高电位输出。经BG1后,使清“0”线为“0”电位,步进器清“0”。这时,由于步进器第三位高电位也随之消失,跳选信号便没有了。但由于单稳的延时作用,BG\(_{2}\)的输出还保持一段时间为“0”电位,通过跳选矩阵上的二极管,使第六位D触发器置“1”。单稳延时结束,跳选工作也就完成,程序将从第六位顺次作下去。单稳延时设计为20毫秒,不会导致输出继电器误动作。
某些工艺需要某几步重复动作,并且有重复动作次数要求。这可以利用跳选功能和计数器相配合解决,我们将在程序编制一节中介绍。
放大器和电子延时继电器
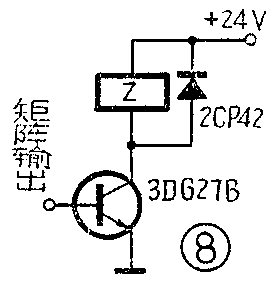
顺序控制器中,每一个输出继电器前面都加了放大器。这是因为矩阵板上的限流电阻(包括各行母线上的电阻和联锁用的各列母线上的电阻)不能很小,否则电源在电阻上消耗功率太大,对电源提出过高的带负载要求。但这样一来,矩阵板输出的电信号就很小了(只有1毫安左右),不加一级放大器,就无法驱动输出继电器。放大器电路如图8所示。
为满足输出继电器延时动作的要求,我们设计了延时吸合继电器(延时释放靠编程序解决),电路见图9。工作原理是这样的:矩阵板中输出列母线送出电流信号时,在射极跟随器BG\(_{1}\)发射极电阻R1上产生压降,该电压通过R\(_{2}\)和R3向电容C充电,当电容电压充至大于稳压管DW击穿电压时,BG\(_{2}\)、BG3导通,继电器J动作。电容C的充电时间,就是延时动作时间。由于R\(_{2}\)、R3和C都不能太大,延时时间约为1~20秒。矩阵板来的电流消失后,电容上的电荷将迅速通过二极管D\(_{1}\)和R1释放,因为R\(_{1}\)很小,所以继电器释放是瞬间的。
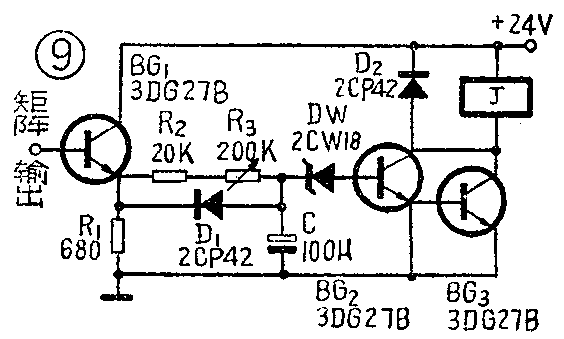
图9中,稳压管DW显然具有增加延时时间的作用。通常选DW的击穿电压为R\(_{1}\)上可能得到的最大电压的60%左右。若DW击穿电压太小,延时时间短;DW击穿电压太大,又会在其它参数变化,例如温度变化引起电阻值变化时,使电容电压同样充到DW击穿电压的时间相差较大。
这种电子延时继电器,还有另外一个作用。有时工艺上某些执行机构不易测出动作完成信号(即转移信号),可以用延时继电器间接地反映出某一步已完成,使步进器移位,参看图5。如果我们只知道Z\(_{4}\)工作t1秒可完成,但不易直接测出动作完成信号,这时可利用延时继电器T\(_{1}\)和二极管①、③。当进入第四步时,Z4动作,同时T\(_{1}\)延时,延时t1秒后,T\(_{1}\)触点打开,第四位的“1”窜入CP母线,使步进器移到第五位,也就是说,用延时继电器的触点获得了转移信号。
计数电路
上面谈的用延时继电器获得转移信号,使步进器移位的方法,延时范围窄,并且一个延时电路只能适用一种延时要求,调整也不方便,需要改进。此外,在步进控制中,有时还有计数要求,把每一步计数终了的信号作为该步到下一步的转移信号(或联锁信号)。下面介绍用“JK触发器”构成的计数器,它能够解决上述两方面的问题。
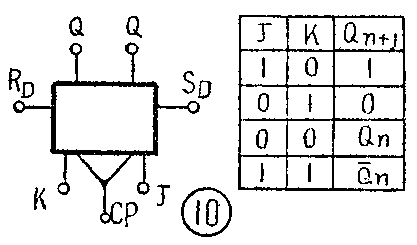
JK触发器的符号及逻辑关系表示于图10中,它的工作原理本刊以后将专文介绍。这里只指出两点:1)从逻辑关系表中可以看出,当J、K两端均为“1”时,Q\(_{n+1}\)=Q-n,即CP端每来一个脉冲(称为时钟脉冲),触发器的状态就翻转一次。这样,我们只要把前一位触发器的输出作为后一位触发器的时钟脉冲,便可以构成二进制计数器了。2)JK触发器是靠CP脉冲的后沿(即负跳变)触发的。
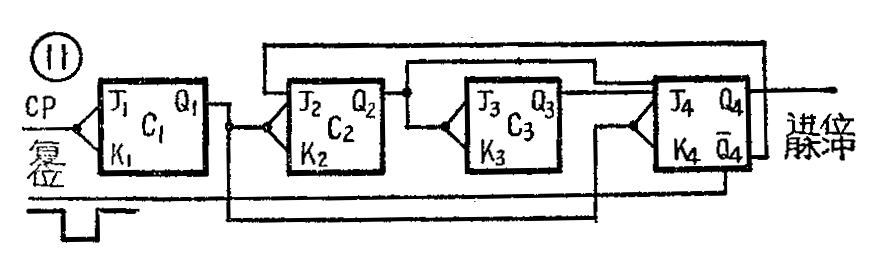
用JK触发器组成的8421代码二——十进制计数器的基本单元如图11所示,它由四个JK触发器C\(_{1}\)—C4组成,工作原理如下,复位脉冲来到时,计数器状态为“0000”。第一个计数脉冲CP\(_{1}\)来到后,Q1由“0”变为“1”。由于JK触发器是靠CP脉冲后沿触发的,因此Q\(_{1}\)由“0”变“1”,只是给C2翻转作好准备,C\(_{2}\)并不翻转,计数器状态为“0001”。当CP2来到后,Q\(_{1}\)由“1”变“0”,导至C2翻转,计数器呈“0010”状态。类似地,读者不难分析出直到CP\(_{8}\)来到前,即计数器状态为“0111”时的情况。当CP8来到后,由于J\(_{4}\)=Q2·Q\(_{3}\)=1,Q1又由“1”变“0”,C\(_{4}\)得以翻转,Q4为“1”,同时Q\(_{2}\)、Q3均由“1”变“0”,计数器状态为“1000”。当CP\(_{9}\)来到后,Q1由“0”变“1”,计数器状态为“1001”。当CP\(_{1}\)0来到后,由于Q-4为“0”使J\(_{2}\)为“0”,C2无法翻转,C\(_{3}\)也不翻转。但Q1由“1”变“0”,又使C\(_{4}\)翻转,Q4由1变“0”(CP\(_{9}\)来到后,J4已由“1”变“0”了),整个计数器回到初始状态“0000”,并且Q\(_{4}\)由“1”变“0”产生一个进位脉冲。
图11可计十进制数中的一位数。需计多位数时把多个基本单元联结起来即可。
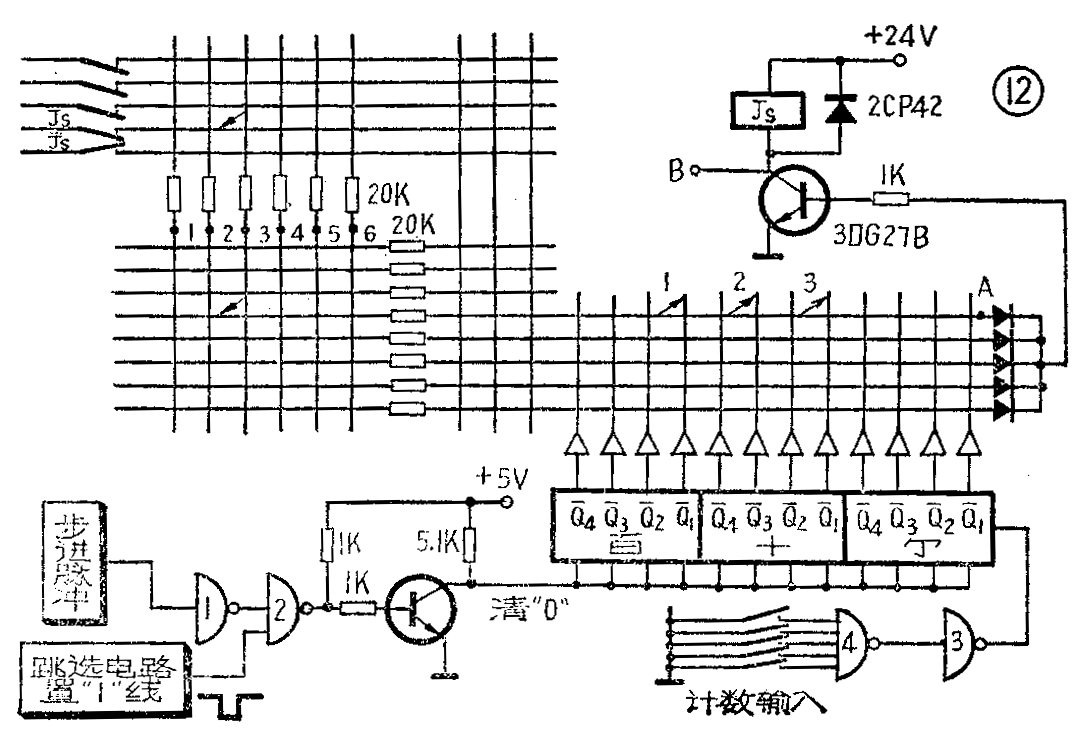
在步进式顺序控制器中,计数器及译码矩阵和其它部分的联结示于图12中,特点是:
1).译码矩阵列母线由输出矩阵列母线引出;有几种计数要求,就要引出几条列母线。译码矩阵的行母线由计数器的Q-端,经反相放大器的输出端引出(反相放大器进行电平转换)。
2).为取得计数终了的信号,译码矩阵列母线与一以继电器J\(_{s}\)为负载的放大器相连,把Js的触点引入输入矩阵,就可以得到转移信号或联锁信号了。
3).计数器的时钟脉冲CP,由现场检测输入继电器触点控制两级与非门直接产生;有几种计数要求,就要有几个计数输入继电器的触点。由于不同计数要求在不同的步内,计数器可共用一个。但每步结束后,一定要把计数器清“0”,否则影响别的步计数的准确。这可以用步进脉冲来控制。但在利用跳选功能时,步与步间的移位,是通过使要跳到的步数的触发器直接置“1”来实现,这时就要利用跳选置数线(跳选时产生负脉冲)经图中与非门2控制放大器,使计数器清“0”,以满足下一步计数要求的准确无误。
下面举例说明怎样完成计数要求:设第三步要求计数到150时转移到第四步。二极管的插法如图中所示,实际上构成了二极管与门。只有当计数器计到150时,三个二极管的阴极电位才都是24伏左右,满足了“与”的条件,输出矩阵行母线上的高电位能通过译码矩阵列母线,送到驱动J\(_{s}\)的放大器输入端,Js动作,产生步进脉冲,转移到第四位;否则二极管1、2、3中总会有导通的,输出高电位通过二极管本身和反相器对地形成通路,把A点电位箝到1伏左右,J\(_{s}\)不能动作。
如果计数器的时钟脉冲CP是来自时钟源的固定频率的振荡脉冲,计数器就可用作数字计时器。例如时钟脉冲的周期为1秒时,计数器计的数就等于秒数。电路上只要把图12中与非门3、4换成图13中示出的时钟源就可以了。
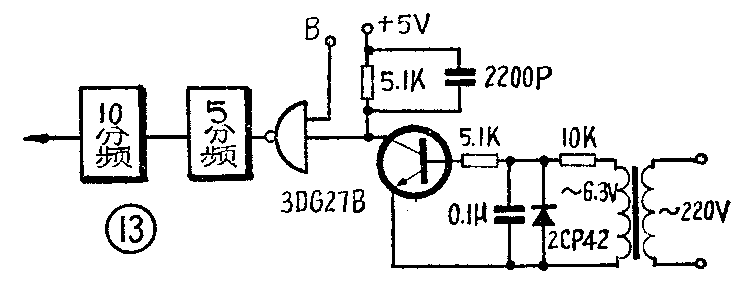
这里,变压器副边6.3伏电压经半波整流后,送至三极管产生周期为0.02秒的方波,再经5分频、10分频后,产生周期为1秒的时钟脉冲。图中B点即图12中的B点。当计时结束后,B点为“0”,将与非门封锁,方波不再送入分频器,计时器便停止计时。待计时器清“0”后,B点变为高电位,与非门打开,就又可以计时了。显然,这样的计时电路,在不需要计时的步中,也并没有停止工作,但对整个控制器没有影响。
计时器可以取代前面介绍过的电子延时继电器单元,优点是计时时间随计数器位数增减而不受限制,计时准确,易于调整,可满足各种计时要求。
显示电路
显示电路包括步进显示电路和输入、输出显示电路。前者清晰地显示步进器移位情况(移到了那一位),便于工人同志监督自动线的工作;后者给调整工作带来极大方便。
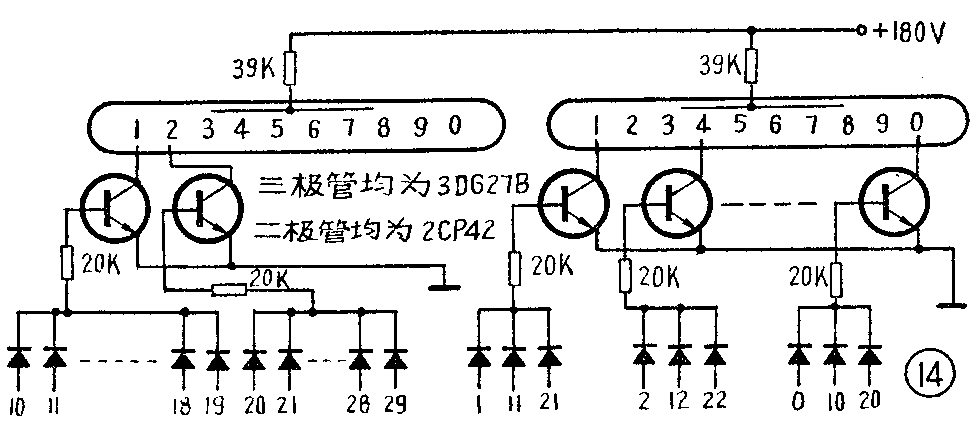
步进显示电路原理图如图14所示。用辉光数码管显示。图中二极管或门的输入接步进器各位输出,具体接法是:个位数码管数字1的或门输入端接至步进器中所有个位为1的位,数字2的或门输入端接至步进器中所有个位为2的位,十位数码管数字1的或门输入端接至步进器中所有十位为1的位,等等。位与位间不能公用输入端。可以看出,个位数每一个数字或门输入端的个数,等于十位数最大数字加1;十位数或门输入端的个数都是十个。二极管或门的输出接至三极管开关。三极管开关分别和数码管十个阴极串联。
下面以步进器移到第十位为例,说明显示原理。这时,个位数码管中数字0的或门输入端中有一个为“1”(高电平),使接数字0的三极管导通,个位数码管显示0。同时,十位数码管中数字1的或门输入端中也有一个为“1”,从而显示数字1。 两个辉光数码管便显示出数字10来。
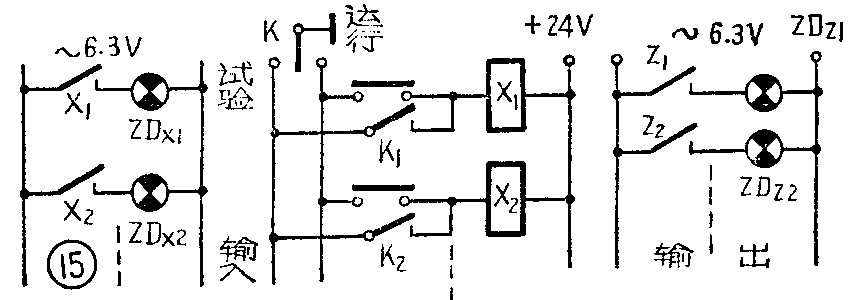
至于输入、输出信号的显示,是十分简单的,只要利用输入或输出继电器的一个常开触点接通指示灯电路就可以了,见图15。(未完待续)(清华大学工业自动化系顺序控制器教学小组)