对于生产过程的控制,有多种方式。就程序变更的灵活性来分类,一种是以继电器控制系统为代表的死程序系统,另一种是以计算机控制系统为典型的活程序系统。继电器系统简单、经济、可靠,但不通用;计算机系统虽然程序变更灵活,却又存在结构复杂、人机联系不便、价格昂贵等缺点,影响了推广应用。
那么,能否研制一种吸取继电器系统和计算机系统的优点,编制程序很容易、结构简单、经济、可靠的通用控制装置呢?
从逻辑关系的组合到步进控制方式
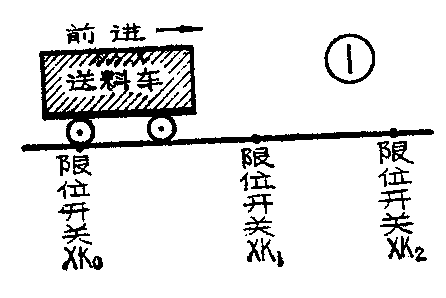
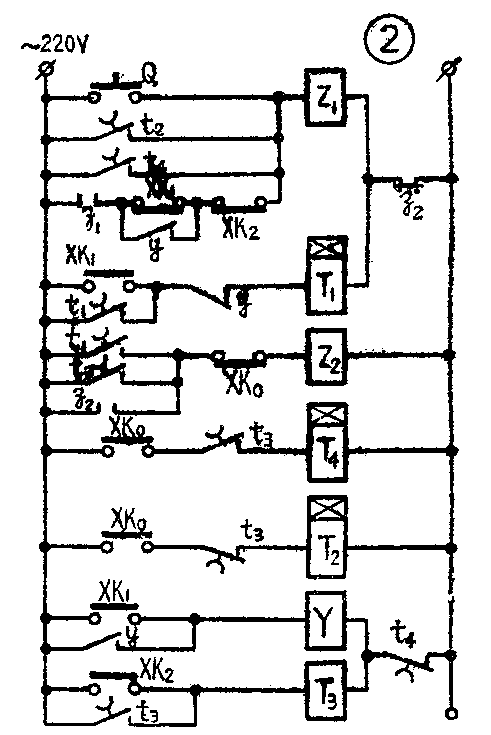
我们从小车送料的简单例子谈起。如图1所示,有一送料车,要求启动后前进至限位开关XK\(_{1}\)处时停下t1时间,然后返回限位开关XK\(_{0}\)处停下t2时间,再前进至限位开关XK\(_{2}\)处停下t3时间,又返回限位开关XK\(_{0}\)处停下t4时间。之后按上述过程重新进行下一循环。图2是满足上述要求的继电器控制线路。其中Z\(_{1}\)、Z2分别为送料车前进、后退接触器, T\(_{1}\)、T2、T\(_{3}\)、T4为延时继电器,Y为中间继电器。显然这种控制线路是过于复杂了。
上述继电器控制线路的设计利用了逻辑原理,即继电器触点串联为“与”关系,并联为“或”关系,常闭触点为“非”关系,触点之间不同的串并联组合构成不同的逻辑关系的组合。正是由于必不可少的各种自保、互锁、联锁等复杂关系,使程序编制变得困难。问题的关键在于:继电器控制系统中,电源母线同时加在各继电器支路两端,继电器得电或断电是通过控制信号和它们之间的触点来实现的。这就给我们启发,如果改变这种控制方式,不把电源母线同时加在各继电器支路两端,而是用控制信号控制电源分别接通应该动作的继电器,那么,各继电器之间复杂的联锁等关系就不必考虑,也就可以使程序编制大大简化了。
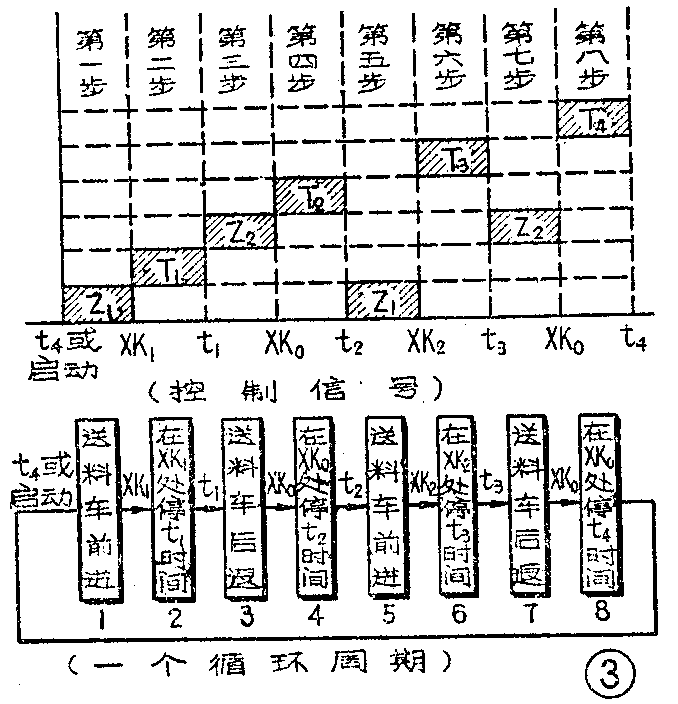
有没有实现这种设想的可能性呢?让我们回到送料车的例子。根据小车送料的工艺要求,我们可以作出图3示出的动作顺序图。从图中可以看出,控制信号——在这里包括现场检测信号XK\(_{0}\)、XK1、XK\(_{2}\)和延时信号t1、t\(_{2}\)、t3、t\(_{4}\)——按照工艺要求把控制过程分成了明显的八步,步与步之间的转换是靠这些控制信号使相应的继电器得电或断电实现的。任何一个继电器都至少受一个控制信号的控制。这些控制信号又称作各步之间的转移信号。第一步,按启动按钮或者t4信号出现,使送料车前进接触器Z\(_{1}\)得电,送料车前进。到达限位开关XK1时转入第二步,使送料车前进接触器Z\(_{1}\)断电,延时继电器T1得电;送料车停在XK\(_{1}\) 处。XK1为第一步到第二步的转移信号。当T\(_{1}\)延时时间一到,信号t1出现,转入第三步,使送料车后退接触器Z\(_{2}\)得电,于是送料车后退。t1为第二步到第三步的转移信号。送料车退回限位开关XK\(_{0}\)处时,转入第四步,使Z2断电,T\(_{2}\)得电,送料车停在XK0处。XK\(_{0}\)为第三步到第四步的转移信号。以后几步,读者不难自行分析,就不赘叙了。
只要对工艺要求熟悉,这种动作顺序图是很容易画出的。于是我们想到,如果把控制器的控制方式与动作顺序图统一起来,不就避免了继电器控制中繁琐的逻辑关系的组合,使程序编制容易了吗?这种控制方式就是步进控制方式:把控制过程分为若干步,依靠转移信号去控制步进,每一步只给该步的继电器送电,而其它步上的继电器均断电。步进式顺序控制器正是根据步进控制方式设计的。
怎样实现步进控制
“我们不但要提出任务,而且要解决完成任务的方法问题。”如何使控制器的控制方式与动作顺序图统一起来,实现步进控制呢?
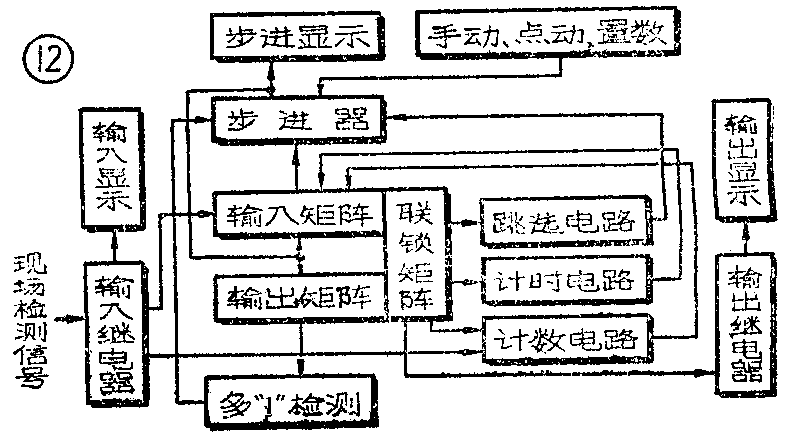
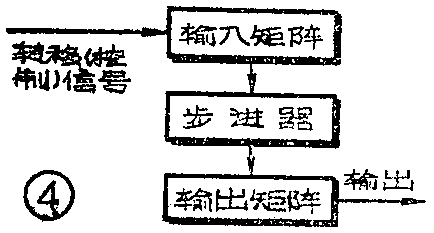
首先要解决步进的问题,这可以用类同分配器的电子“步进器”或机械式“步进选线器”。它们的作用是根据转移信号实现自动移位,从而使电源给应动作的继电器送电。转移信号控制步进的功能和电源给应动作的继电器送电,分别由输入矩阵和输出矩阵实现。这样,我们便构成了步进式顺序控制器的基本框图,见图4。
步进器 我们采用电子式步进器。它由若干位组成,以满足工艺上步数的需要。每位可分别置“1”(输出高电位),各位又可同时清“0”(输出低电位)。在某一位置“1”时,接到一个步进脉冲CP向右移动一位;移到最后一位,就自动返回第一位进行循环。移位过程进行得极快,不致引起继电器误动作。详细电路及工作原理在控制单元一节中介绍。
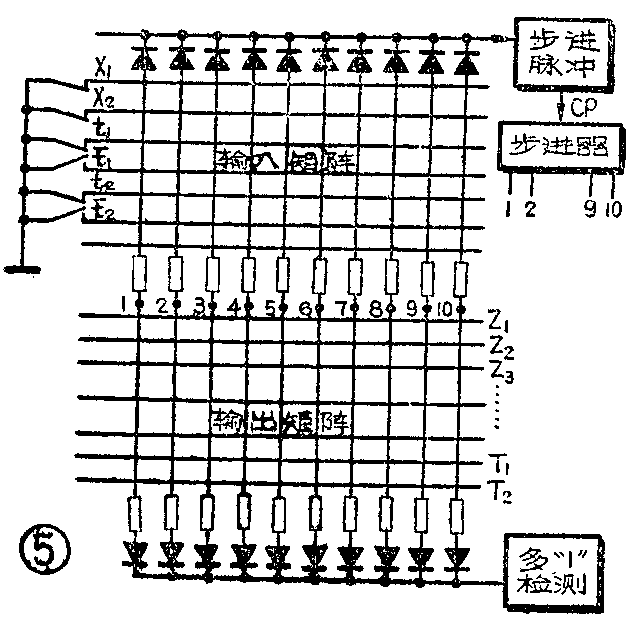
输入、输出矩阵 图5示出输入、输出矩阵以及它们和控制器其它部分的相互关系。其中带有电阻和二极管的竖线叫行母线,横线叫列母线。每一条行母线对应步进器的一位,步进器输出依次接到1、2、3……各点,在工艺上即对应着每一步。为取得控制信号,输入矩阵列母线分别接到输入继电器的触点(接收反映现场工作状态的现场检测信号)和输出继电器、延时继电器的反馈触点上,图中用X\(_{1}\)、X2、t\(_{1}\)、t-1等表示。输出矩阵列母线接输出放大器或延时放大器,再由放大器带动输出继电器,图中用Z\(_{1}\)、Z2、T\(_{1}\)、T2等表示。
输入、输出矩阵的行、列母线互不相接,而是根据工艺要求在相应位置上用二极管加以联接,二极管阳极接行母线,阴极接列母线。我们知道,计算机控制系统通用性好,是因为它具有存储器;不同工艺的控制要求可以用改变存储内容的办法实现。为使步进式顺序控制器也有一定的通用性,我们把输入、输出矩阵搞成活接线方式;改变二极管的联接位置,就能满足不同的工艺要求了。
怎样根据动作顺序图在矩阵板上插接二极管呢?如前所述,步进式顺序控制器的控制思想是根据转移信号使步进器自动移位,从而在每一步使电源只给应该动作的继电器送电,因此,插接二极管所遵循的规律应该是:每一步的输出继电器和该步到下一步的转移信号(即反映该步动作完成的信号),要通过二极管安排在同一条行母线上。前者保证步进器移到某一位时,相应的输出继电器得电;后者则保证只有当转移信号到来时,步进器才会自动移到下一位。下面还是以送料车为例详细说明。根据送料车动作顺序图(图3)在矩阵板上插接二极管,我们得到图6。电气控制过程如下:
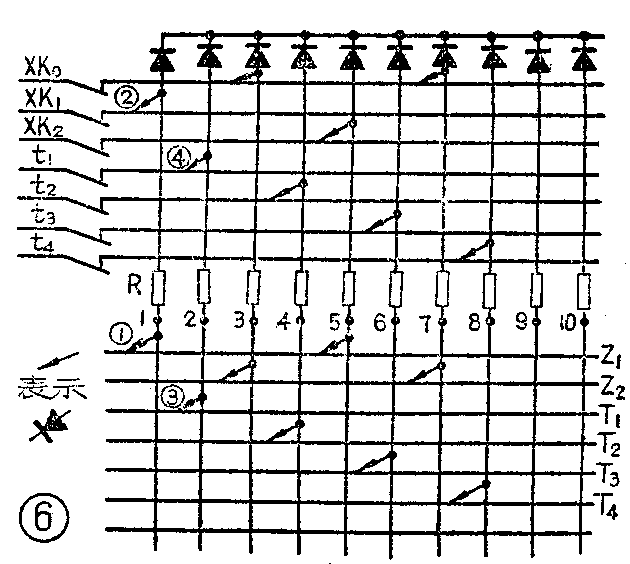
按启动按钮使步进器第一位置“1”,1端输出高电位(如20V),此端接入矩阵板1点上,因此高电位经输出矩阵第一条行母线上的二极管①送给输出放大器,使Z\(_{1}\)得电,送料车前进。同时,由于小车未到XK1处, XK\(_{1}\)没有打开,第一条行母线上输入部分被二极管②箝位在0.7V左右,步进脉冲单元没有高电位输入,不发步进脉冲,步进器停留在第一位上,送料车继续前进。当送料车到达XK1处时,XK\(_{1}\)打开,二极管箝位作用失去,高电位通过电阻R及和它串联的二极管窜向CP母线(图6中最上面的一根横线)送给步进脉冲单元,发出步进脉冲,使步进器由第一位移到第二位,即1端输出为“0”——低电位(0.3V),2端输出高电位。这样,第二条行母线上2点变为高电位,Z1断电,小车停在XK\(_{1}\)位置,而延时继电器T1通过二极管③得电,开始延时。只要延时时间还没到,触点t\(_{1}\)不打开,第二条行母线输入部分就被二极管④箝位,使步进器不向前移位。T1延时时间一到,t\(_{1}\)打开,高电位即可送到步进脉冲单元,导至步进器移到第三位,3点为高电位,2点为低电位,Z2得电,T\(_{1}\)断电, 送料车开始后退。以下过程相同。
通过上面的分析可以看出,步进脉冲的发出,是靠行母线上的高电位和本条行母线上的控制信号共同决定的,二者缺一不可,因此控制信号可多次使用(如XK\(_{0}\)用了两次)。同时,别的行母线上控制信号出现与否对步进脉冲是否出现毫无影响,所以当送料车第二次前进经过XK1时引起XK\(_{1}\)动作的问题可以不考虑。而在继电器控制线路中就必须加中间继电器Y来记忆。
多“1”检测 这一部分(包括输出矩阵下面的电阻和二极管)的作用,是保证步进器只有一位是高电位而其它位均为低电位,以避免发生电源短路、机械碰撞等事故。当出现两位以上高电位时,多“1”检测单元就发出停机命令并报警。
怎样进一步提高通用性
“世界上的事情是复杂的,是由各方面的因素决定的。”作为开关量控制的通用性装置,有上面几个部分还不够。
首先,由前面介绍的几部分组成控制器,工作是一步一步顺序进行的。但某些生产工艺中,在一定条件下需要由某一步一下子跳过几步不做,然后再顺次工作(或跳回几步,重复做),例如送料车一例,如果XK\(_{1}\)处料已满了,小车到XK1不停车,直接送给XK\(_{2}\),就属于这种情况。这就要求第一步完成后跳过第二、三、四步到第五步,然后再依次动作。这种功能叫跳选功能。为实现跳选功能,需要增加一个跳选单元。
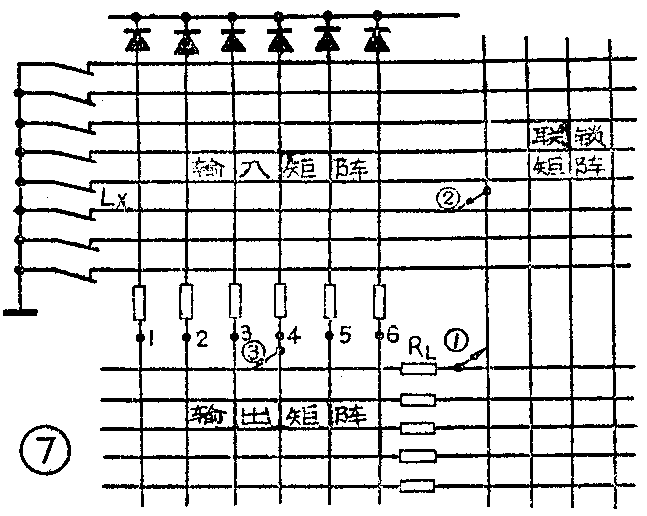
另外,某些工艺有时要求在满足一定条件时,禁止某个输出继电器得电,换句话说,步进器进入某一位时,输出继电器是否得电,还要看一定条件允许不允许。类似这样的控制要求,我们叫做联锁。为了解决这个问题,我们在输入、输出矩阵外又增加一个联锁矩阵,见图7。利用联锁矩阵时,二极管的插法是在需要联锁的输出继电器的列母线上反插一个二极管于联锁行母线上(阳极接列母线,阴极接行母线,图7中二极管①),同时再在联锁行母线上与联锁信号L\(_{X}\)列母线上插接一个二极管(图7中二极管②)。工作原理是: 高电位通过该步行母线上的二极管③和电阻RL加在输出放大器输入端和反接二极管①的阳极。联锁信号没有出现时,输出放大器输入端电位被二极管②箝位到1V(二个二极管压降)左右,从而输出放大器带不动输出继电器,实现了联锁。
有些工艺如果按照送料车例中那样划分步数的话,步数会很多,步进器也就要有很多位,不经济。利用联锁矩阵可以使步数减少。例如送料车工艺前面分成八步(步进器至少要有八位),利用联锁可以把它缩减成四步。具体作法是依次把两步合为一步,动作顺序与控制信号之间的关系见图8。程序排列见图9。
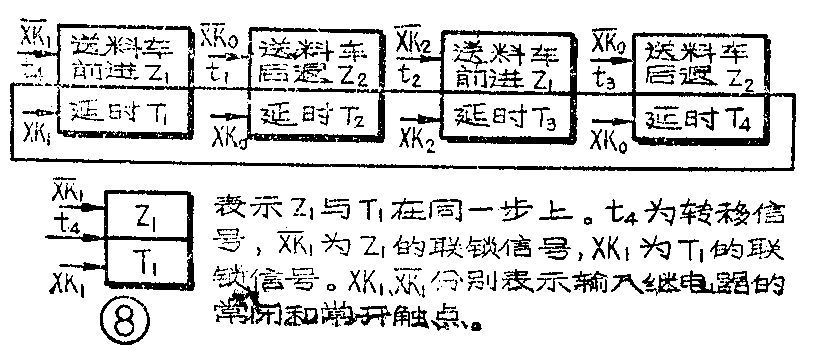
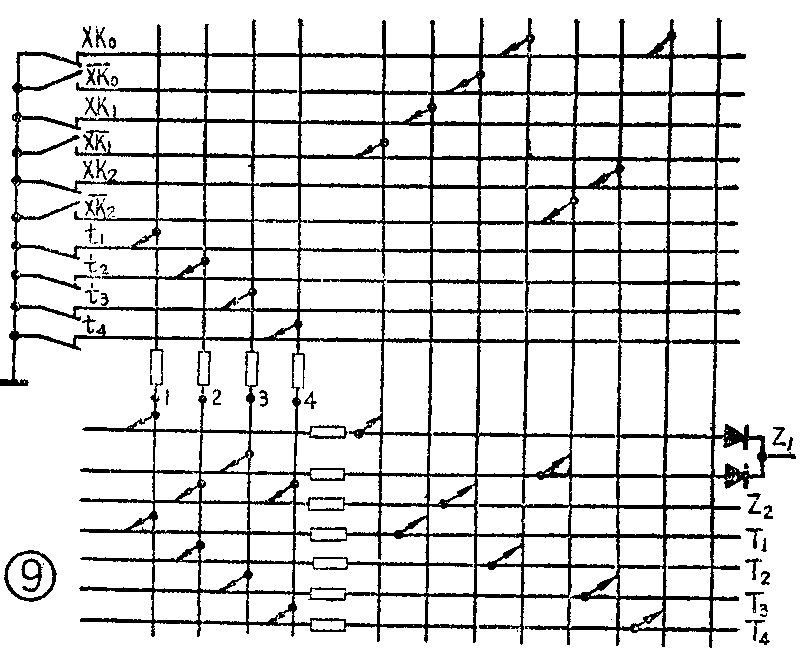
图9中, Z\(_{1}\)占用了两条列母线,它们组成了“或”门,即第一步由第一条列母线供电给Z1,当XK\(_{1}\)信号出现时Z1禁止;第三步由第二条列母线供电给Z\(_{1}\),当XK2信号出现时Z\(_{1}\)禁止,实现了工艺要求。
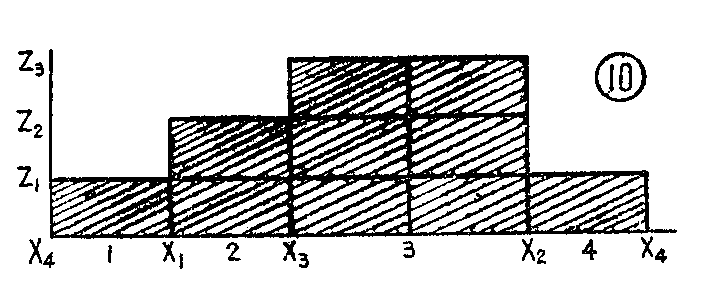
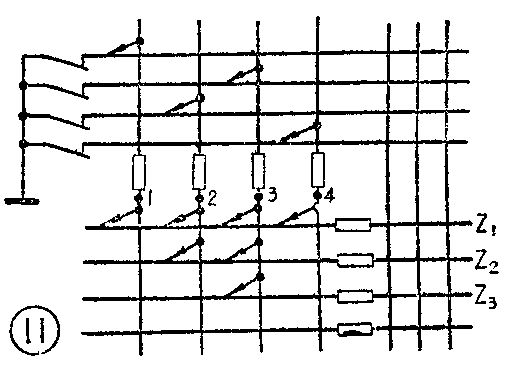
输出矩阵同一条行母线上可以安排多个二极管,这种情形我们叫做同步输出。在工艺顺序图上,它体现的是类似于图10中的第二步和第三步。在矩阵板上的程序排列见图11。其中Z\(_{1}\)在每一步上都有输出,叫做或步输出。
一般说来,工艺过程除有动作顺序要求外,有时还要求计时、计数等。为满足这些要求,步进式顺序控制器应有计时电路、计数电路等。为使控制器调整、检查程序方便。可增加显示部分,对输入信号、输出信号、步数加以显示。为使控制器适应种种不同的控制要求,可增加点动、手动、置数、报警部分。
综合上面的介绍,我们可以画出这种以步进器为主体,配合二极管矩阵,可以直接按工艺顺序图排程序的步进式顺序控制器的方框图了,见图12。(未完待续)(清华大学工业自动化系 顺序控制器教学小组)