步进电机是一种利用电磁铁作用原理,将脉冲信号转换成角位移的电机,近年来获得越来越广泛的应用。例如,在开环数控机床中,步进电机广泛用作伺服驱动电机;而在本刊1974年第2期封二照片介绍的电子雕刻机中,步进电机是作同步电机用的,保证图象和被雕刻体、摄取图象的光源和雕刻头都能同步。本文以单定子三相反应式步进电机为例,对步进电机的结构、工作原理和控制方法作简单介绍。
结构和工作原理
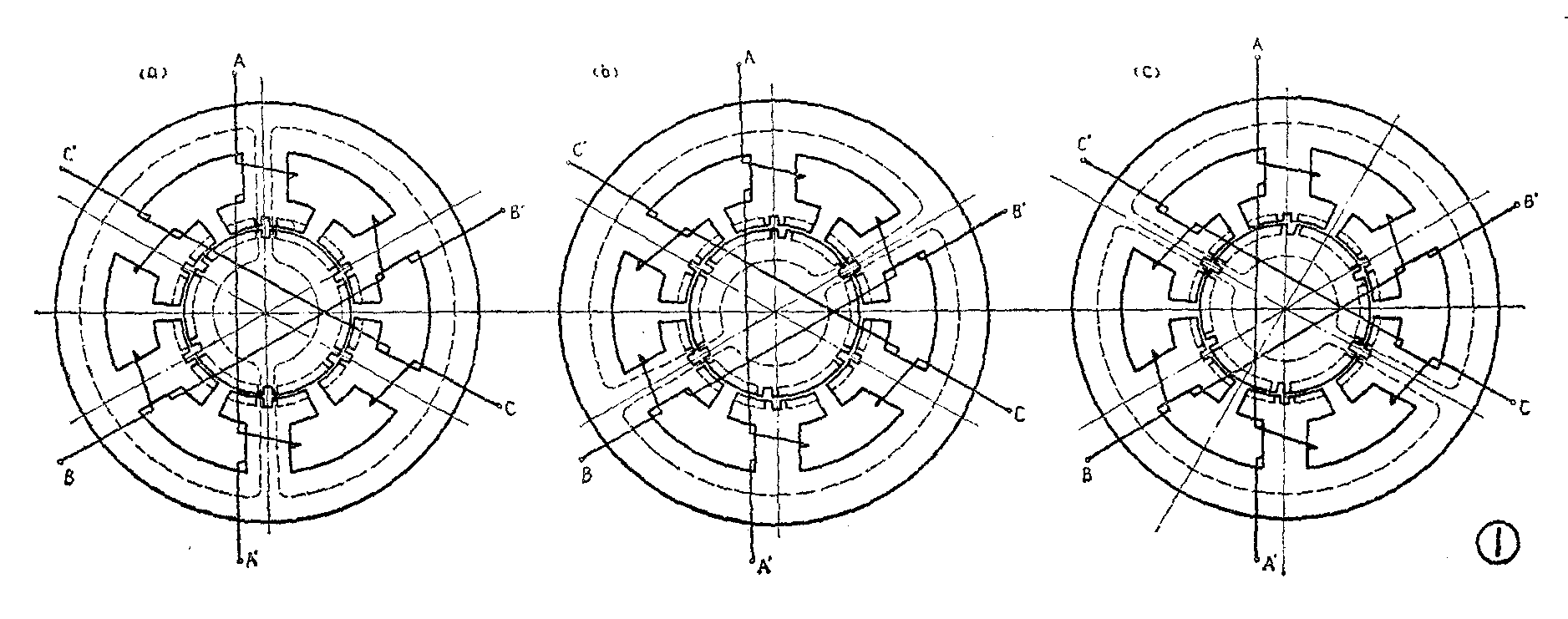
这种步进电机由具有六个等分磁极的定子和均匀分布40个小齿的转子构成。定子每个磁极上有六个均匀分布的小齿,极的中心线即是槽的中心线。极上绕有集中绕组,两个相对的极组成一相,其绕组接成N—S极(见图1a)。我们称相邻两齿中心线间的夹角为齿距角。定、转子齿距角相等,均为9°。齿形一般取短形。
步进电机是基于电磁铁作用原理旋转的。下面介绍单三拍、六拍、双三拍三种工作方式的基本原理。
1.单三拍 设首先A相通电(B、C两相不通电),建立以A-A'为轴线的磁通,并与转子形成磁路。转子在磁场作用下势必要旋转至转子齿与A相定子齿对齐的位置,而B、C相定于齿分别和转子齿错开\(\frac{1}{3}\)齿距角(3°)和2;3齿距角(6°),如图la所示。然后给B相通电(A 、C两相不通电),转子在以B-B'为轴线的磁场作用下,就要逆时针方向旋转3°,使转子齿从原来与A相定子齿对齐变成与B相定子齿对齐(图1b)。同样的道理,当A、B相断电而C相接通时,转子就要再旋转3°,使转子齿与C相定子齿对齐了(图 1C)。不难理解,当以A—B—C—A—B—C—……的顺序依次通电时,电机会逆时针方向一步一步地转动,绕组通电换接一次,转动的角度是3°(叫做步距角);电流换接三次,磁场旋转一周,转子前进一个齿距角(9°)。如果以A—C—B—A—CB—……的方式通电,电机就顺时针方向旋转。这种通电方式叫单三拍方式。
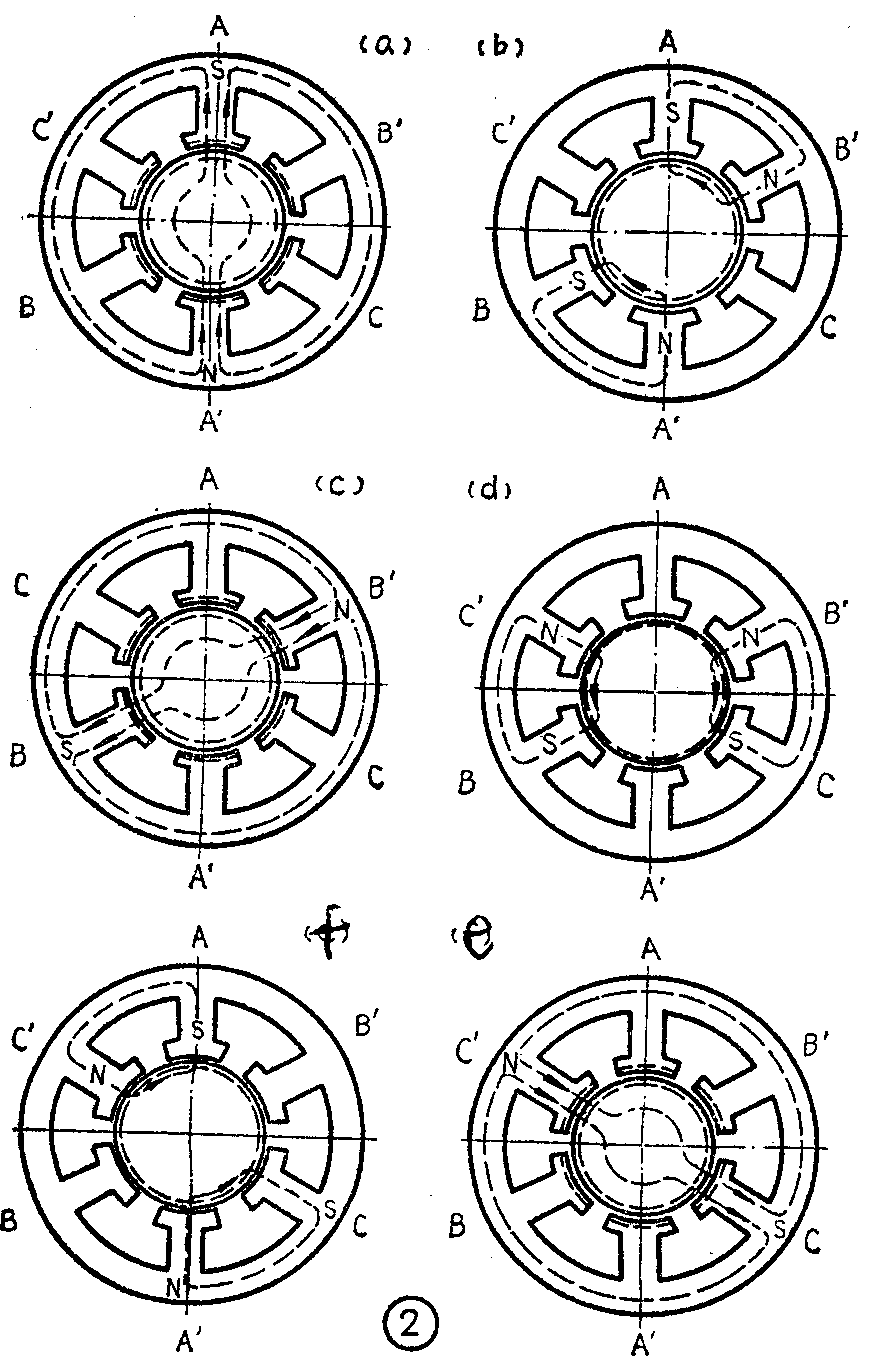
2.六拍 如果换一种通电方式,首先使A相通电,转子齿与A相定子齿对齐(图2a)。然后在A相继续通电的情况下接通B相,这时A、B两相建立的合成磁场轴线为C-C'(图2b),合成磁场力图使转子齿同时与A、B两相定子齿对齐。由于A、B两相定子齿间有3°的错位,这显然是不可能的,而只能对齐A、B两相定子齿的中间,即使转子齿比A相通电时的位置移前1/6齿距角——1.5°。这样,当我们以A—A、B—B—B、C—C—C、A—A—……的顺序依次通电时,电机就将以 1.5°的步距角转动;绕组通电换接六次,磁场旋转一周,转子前进一个齿距角(见图2a—f)。这种通电方式叫六拍方式。
3.双三拍 若每次均是两相通电,也就是按AB—BC—CA—AB—……的顺序通电时,叫双三拍方式。这种通电方式中,步距角为\(\frac{1}{3}\)齿距角,转子齿所处的位置恰为六拍通电方式中不是单三拍通电时所处的那三个位置。
上述三种通电方式比较,就耗电量而言,单三拍耗电最少,双三拍耗电最多;就运转时步距角精度说,单、双三拍精度较高。六拍通电方式是一相、两相相间通电的,一相通电时电源内阻引起的压降小于两相通电时的压降,两相通电时每相电流比一相通电时小,因此转子齿在两相通电时移动的角度小于1.5°,一相通电时则大于1.5°,每步精度较单、双三拍方式差。但这一步大一步小的现象恰好是互补的,每两步的积累误差与单、双三拍方式相同。
通过上面的介绍,我们可以看出,步进电机除了具有结构简单、维护方便的特点外,还有以下几个一般电机不具备的特殊性能:①精度高,没有积累误差。②启动时反应快,停车能自锁,可以准确停在所需要的位置,这就给开环控制创造了条件。③电机转速决定于脉冲频率,并与频率同步,同一频率源控制几台电机能获得很好的同步性;若频率源从零至最高跟踪频率平滑可调,则变成高变速比的调速电机。
驱动电路
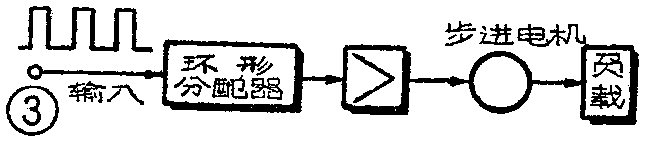
步进电机的输入信号是一系列的脉冲,不能直接用来控制电机绕组,必须首先按照工作方式规定的规律分配A、B、C三相,然后放大到足以获得强大的旋转磁场拖动电机作功。由环行分配器和功率放大器组成的驱动电路完成上述任务,方框图见图3。
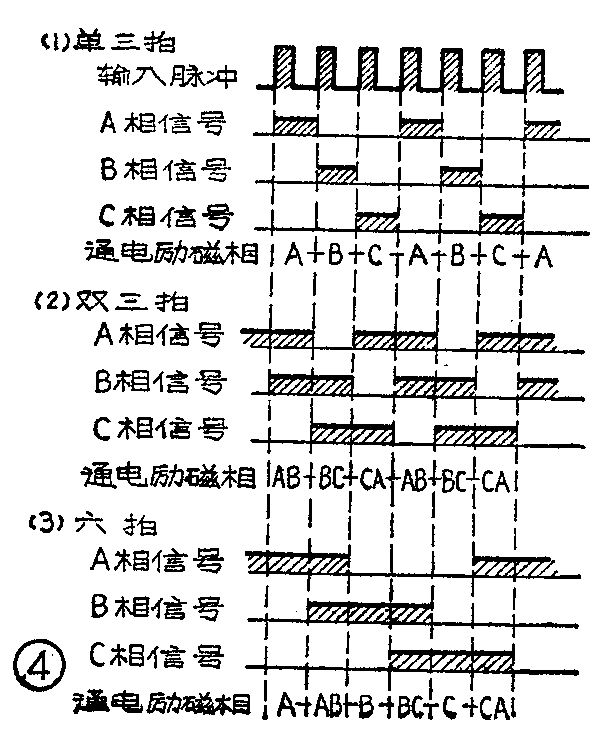
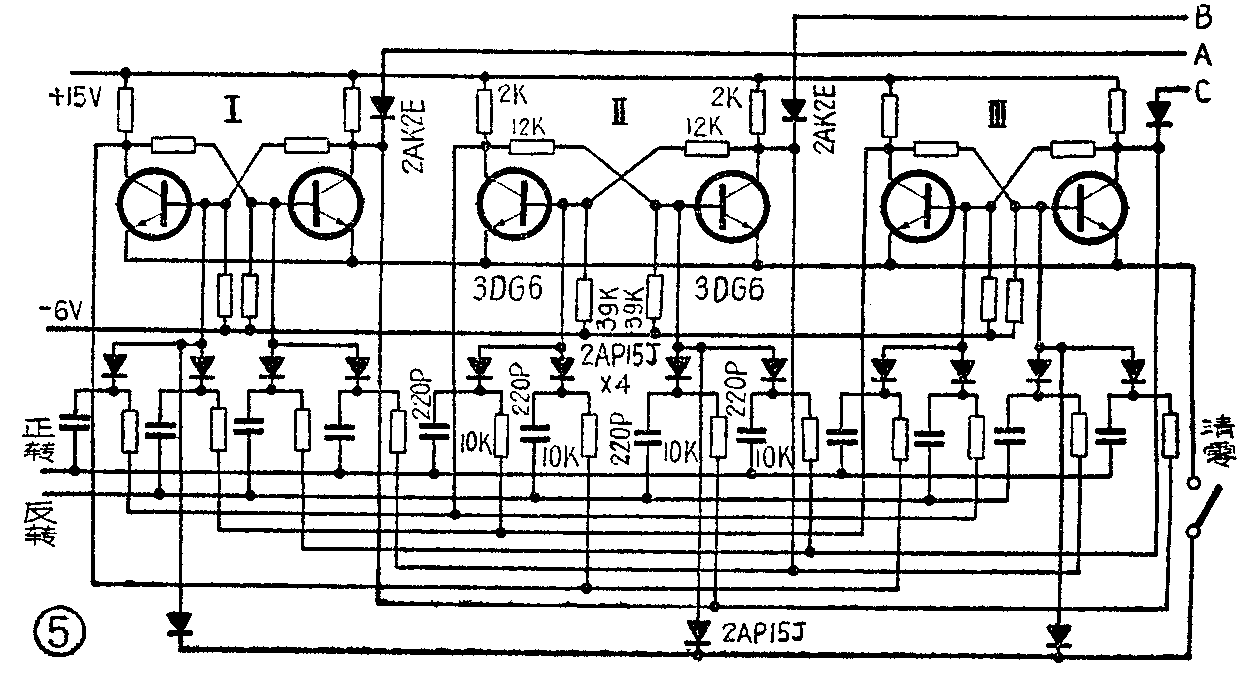
1.环形分配器 它的作用是把输入脉冲按步进电机各相通电次序加以分配。单三拍、六拍、双三拍三种基本工作方式所要求的脉冲分配规律示于图4中。图5是一种六拍环形分配器的电路图,它由三个双稳态触发器构成,其间联线由脉冲分配规律决定。对正转输入信号来说,触发器Ⅰ、Ⅱ、Ⅲ的输入端脉冲电位与门分别由触发器Ⅱ、Ⅲ、Ⅰ输出端控制。对反转输入信号来说,触发器Ⅰ、Ⅱ、Ⅲ输入端脉冲电位与门则由触发器Ⅲ、Ⅰ、Ⅱ输出端控制。读者不难根据双稳态触发器的工作原理分析出正、反转时电路的工作情况。
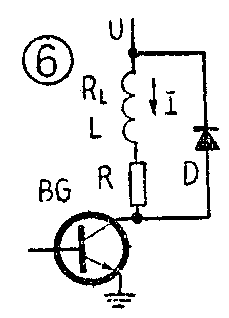
2.功率放大器 环行分配器输出信号较小,不能满足电机励磁要求,通常都需要加接放大器。末级功率放大器的基本电路如图6所示,其中L为电机绕组电感,R为外接电阻。由于绕组电感作用,当BG导通时,脉冲电流不能立即上升到标定值,而是按指数规律上升,加入外接电阻可使电路时间常数减小,加快脉冲电流的上升。这样,就使励磁时产生的平均力矩增大,转子启动时有较大的加速度,产生相同加速度的时间也能提前,启动频率也提高了。总之,外接电阻在保证一定的电流时改善了高频特性,但也要消耗一定的功率。
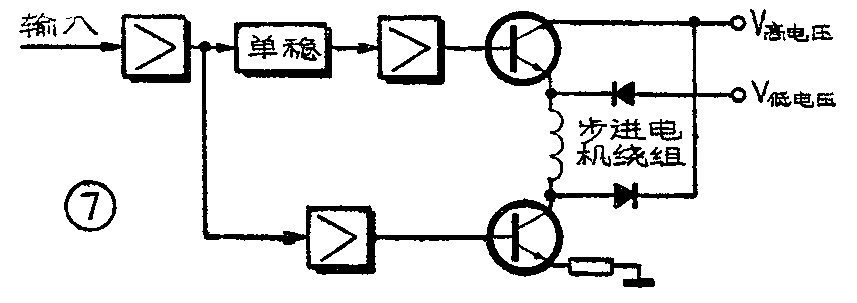
随着自动化的发展,人们对高频步进电机(10千赫以上)越来越感兴趣。频率相当高时,靠加大外接电阻的方法改善高频性能,因损耗太大显然是不适宜的。高频大功率步进电机要求有一种在通电瞬间能强迫电流加速上升,在高频范围内保证有足够的平均电流而又没有外接电阻的功放线路。一种能满足上述要求的线路是高低压线路。这种线路在通电瞬间用高电压供电,然后即用低电压供电。方法是把分配器来的信号分成两路,一路经单稳态触发器得到宽度较窄的脉冲去触发功放线路高压管,另一路直接触发功放线路低压管。现有电机高压脉宽一般为400微秒—1000微秒左右,高压一般为60伏—100伏左右,低压在12伏—24伏左右。高低压线路示意图见图7。(常州电讯电机厂 陈理璧)