(上海市渔业机械仪器研究所)我国沿海有丰富的鱼类资源,分布在各个水层。要捕鱼,就要对鱼群进行侦察,了解鱼群在什么地方,才能实现瞄准捕捞,提高捕捞效率。本文介绍的半导体探鱼仪就是根据机帆渔船特点进行设计试制的超声波探鱼仪。
探鱼仪的工作原理
当我们对着井口高喊一声,过不久就能听到从井底反射回来的回声。探鱼仪就是利用回声原理,周期地向海底发射超声脉冲波,并接收来自鱼群和海底的微弱反射回波信号。只要能精确地测得发射脉冲与接收信号脉冲的间隔时间t,就可算出鱼群所处水深位置。
鱼群所处水深=vt/2
v是声波在水中的传播速度,约1500米/秒。
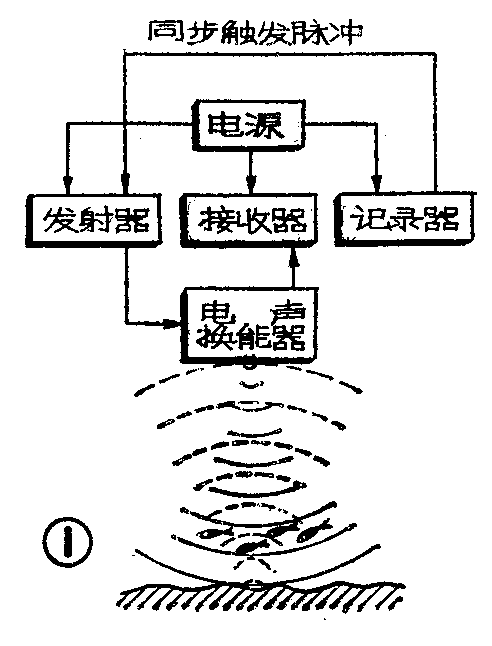
根据回声原理设计的探鱼仪一般如图1所示。由记录器给出的同步触发脉冲,使发射器产生超声脉冲送至电声换能器发射出去。反射回来的微弱信号经电声换能器送至放大器进行放大,最后由记录器记录出来。
电声换能器是电能与声能互相转换的器件,它的特性是在一定频率的磁场或电场激励下,引起机械共振,以实现电声转换。反之在一定频率声场作用下,又会产生相应的磁场或电场,达到声电转换。
记录器采用的是电敏纸记录。这种记录即使在较高的航行噪声背景下,也能辨认出鱼群记录映象,同时记录纸还能长期保存,以便进行记录映象分析、判别鱼的种类及估计数量。
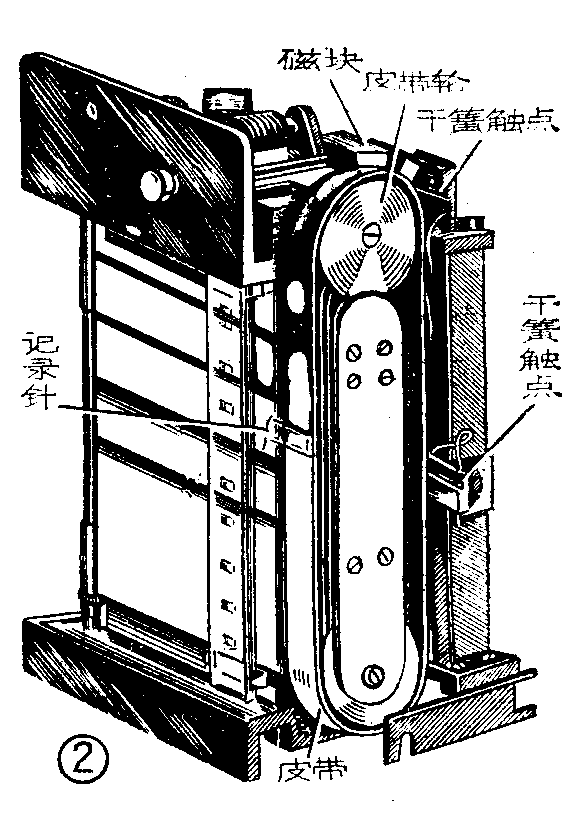
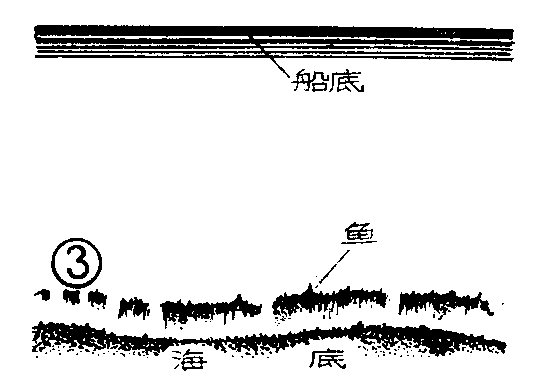
图2是半导体探鱼仪的记录器,图3是探鱼记录。
探鱼仪电路原理
1.发射器:
图4是发射器原理方框及线路图。其中K\(_{4}\)、K5是装在记录架上的干簧管触点,K\(_{3}\)是控制面板上的量程开关。装在记录皮带上的磁钢刚转动到干簧管触点时,干簧触点受磁钢吸力而闭合,这时记录笔的位置刚处于标尺“零”位,这样就实现了发射器与记录器的同步触发。根据记录器的皮带转速,干簧管触点闭合时间约为7—10毫秒。在浅海海区应用的探鱼仪发射脉冲宽度约1毫秒。脉冲窄,最小测深盲区小;脉冲宽,探鱼灵敏度高。
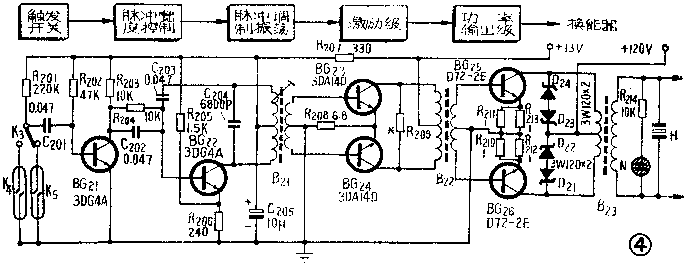
干簧管未吸合时,C\(_{2}\)01经R201、BG\(_{21}\)基极充电到约10伏,BG21因R\(_{2}\)02正偏置而工作在饱和状态,它的集电极电压小于0.3伏。当干簧管闭合时,C201经R\(_{2}\)02放电,BG21处于负偏置而截止,集电极电压升高,输出一个宽度为1毫秒的正矩形脉冲,这正矩形脉冲用来调制振荡管BG\(_{22}\)。BG22一般处于截止伏态,当BG\(_{21}\)正脉冲输出时,突变为正偏置,于是振荡产生,输出一个宽度为1毫秒载波为48千赫的脉冲,经BG23、BG\(_{24}\)放大推动末级,输出120W脉冲功率到换能器。由于晶体管性能不一,R209必须选配,控制激励功率,以免末级功率管BG\(_{25}\)、BG26过载损坏。D\(_{21}\)、D22、D\(_{23}\)、D24是为了防止输出变压器上电压反冲引起BG\(_{25}\)、BG26击穿。
2.接收器:
图5是接收器的方框与原理图。由于收、发共用一只换能器,所以必须在接收器输入端接有过载保护电路。它由R\(_{216}\)、D11、D\(_{12}\)、D13、D\(_{14}\)组成。当发射器发射,有强信号输入时, Dll、D\(_{12}\)、 D13、D\(_{14}\)就导通,这使送到BG11基极的信号最高电压不会大于0.7伏,保证了BG\(_{11}\)管的安全。对于发射器来讲,就相当于接上了1.5千欧的负载电阻,比起换能器发射等效电阻200欧来,功率损耗不大。发射停止,等待接收时,因进入到换能器的接收信号都是弱信号,D11、D\(_{12}\)、D13、D\(_{14}\)均处于开路状态,对接收没有影响。R215的串入,对输入信号强度有所衰减,可以由放大器增益来补偿。
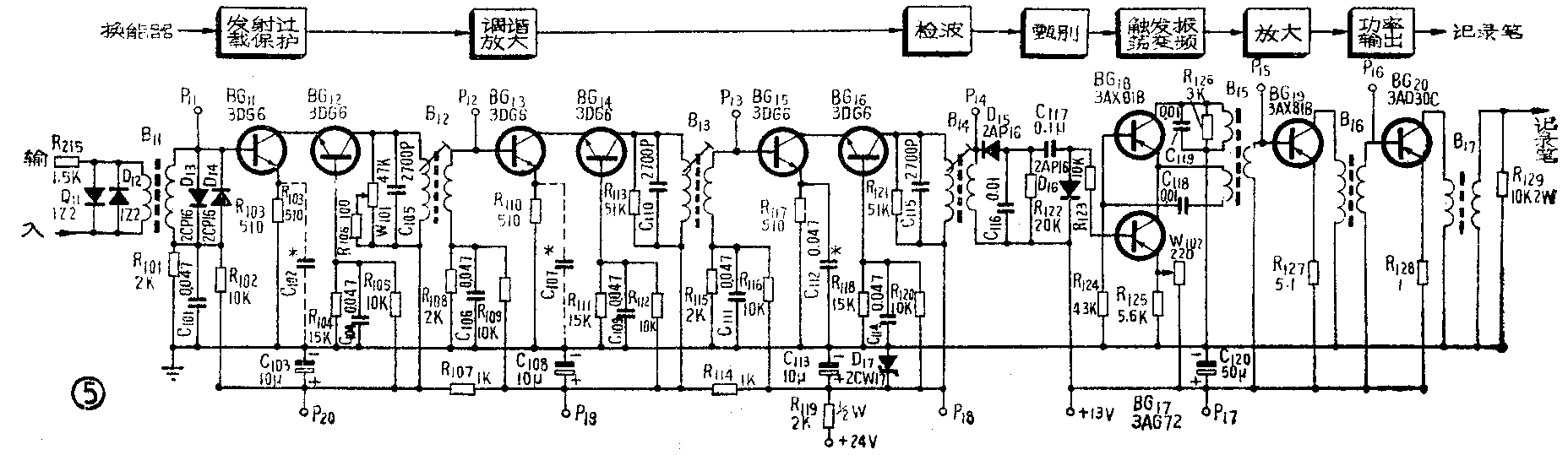
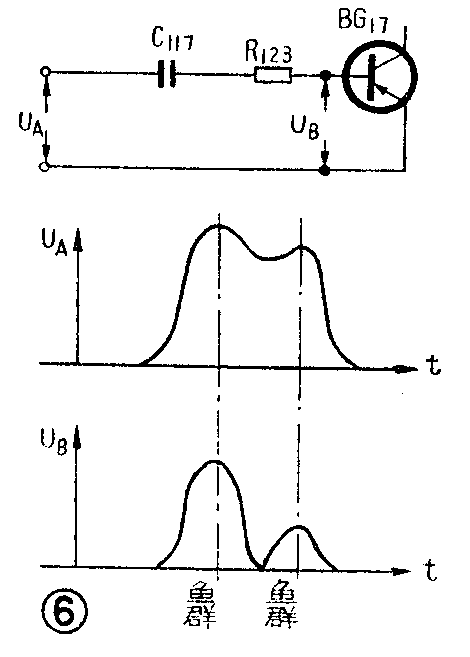
接收器采用三级调谐放大,每级由二只3DG6管组成共发射共基极串接放大器。经实践测试,这样的三级放大器在增益达120分贝时仍能稳定工作。在生产调试时一般控制在100分贝以下,保证放大器足够稳定。放大器增益控制采用改变槽路负载Q值的方法,使在-20℃——+60℃范围内放大器增益变化很小。经三级放大后的信号由D\(_{15}\)二极管检波。由于从鱼群或海底反射回来的回波经三级调谐放大后包络均已拉宽,为了能分辨出相邻两个鱼群目标或贴海底的鱼群,就必需附加甄别电路。由C117、R\(_{123}\)与BG17输入电阻组成,其甄别原理可从图6看出。U\(_{A}\)是两个相邻鱼群经放大后输出的波形,互相混在一起,在记录器上不可能分开来。但经甄别后输出的波形UB两个相邻鱼群分开,在记录器上也可以分开了。经甄别后的输出脉冲去触发BG\(_{17}\)。在无触发脉冲时BG17处于截止状态,它是串在振荡管BG\(_{18}\)发射极上,因而没有振荡输出。当信号脉冲到来,其幅度又大于BG17的开启电平,振荡级就开始振荡,其频率约10千赫,经BG\(_{19}\)、BG20两级放大后输出幅度峰值达到150伏以上,足以用来击穿电敏记录纸。为了适应海里噪声的大小,在BG\(_{17}\)的发射极加了一只闸门电位器,也就是用来控制BG17的开启电平,以适应渔船在各种情况的需要。整个接收器的前三级放大器采用D\(_{17}\)稳压管稳压馈电,后三级采用13伏稳压馈电,以提高整机稳定性。
3.电源:
机帆渔船供电一般由主机带动一直流发电机对电瓶直接充电供给,因此随着主机车头的变化,供电电压波动很大,可达-20%——+50%,这样大的波动电压对半导体探鱼仪来讲,是引起晶体管损坏的主要原因。为了提高整机的可靠性,必须加强电源稳定可靠的措施。
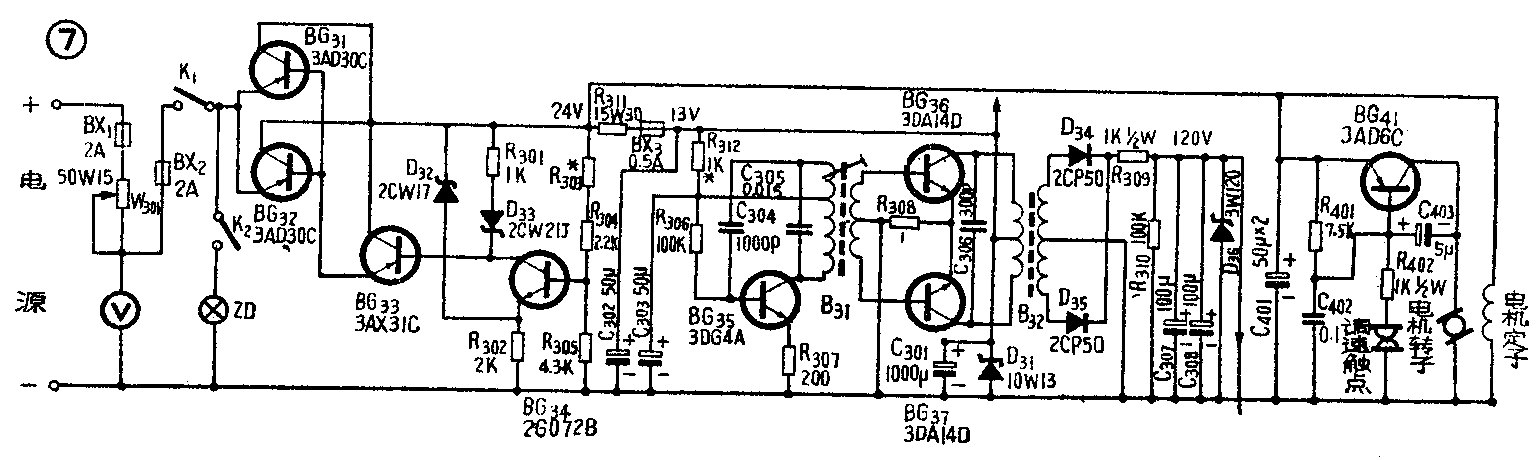
图7是稳压电源原理图。由BG\(_{31}\)、BG32、BG\(_{33}\)、BG34等晶体管组成串联调整式24伏稳压电源。D\(_{32}\)是参考电压源,BG34是比较放大器,BG\(_{31}\)、BG32和BG\(_{33}\)组成复合调整管。其自动调整过程是:当输入电源电压升高时,将引起24伏稳压输出有升高的趁势,因D32是稳压管,所以它的升高趋势全反应在BG\(_{34}\)发射极电位的升高;同时由R303、R\(_{3}\)04、R305组成的分压器,按一定的分压比反应到BG\(_{34}\)的基极,使基极电位也升高,由于BG34发射极电位比基极电位升高得多,比较放大的结果使BG\(_{34}\)输出电流减小,复合调整管内阻增大,调整管压降也就加大,于是当输入电源电压升高时,只是调整管压降加大,24伏输出仍能保持稳定不变。24伏稳压电源直接用来供给记录器马达,为了适应马达启动需要大电流,在24伏稳压电路中附加了R381、D\(_{33}\)支路。它的作用是当电源一接通,马达还未启动时,负载呈低阻抗,这时通过低阻抗通路和R301把D\(_{33}\)击穿,直接激励调整管,强迫马达启动并建立起输出电压。当24伏输出稳压建立后,D33处于截止状态,因此,此支路的接入不会影响稳压特性。在电源输入前附加一个调压器W\(_{3}\)01,主要是考虑BG31、BG\(_{32}\)不要长期处于过热状态而影响可靠性。当外来电源过高时可以调节W301让电压先降低到30伏以下应用。为了确保大功率晶体管的安全,再把24伏电压通过D\(_{31}\)稳压在13伏后,供给其它部分。供发射输出管用的120伏高压,是由13伏电源馈电,BG35产生约33千赫的高频振荡,经BG\(_{36}\)、BG37推挽放大,D\(_{34}\)、D35整流后产生的,稳压由D\(_{86}\)保证。为了尽量保障发射功率管的安全,此高压电源的连续功率容量够为3W左右,因此一旦发射器出现过宽的振荡脉冲或连续振荡,负载加重,高压会自动跌落,不致引起BG25、BG\(_{26}\)的损坏。
BG\(_{41}\)这部分线路是用于减少电机机械离心调速器触点的火花。它一方面减少火花对接收器的电气干扰,另一方面可延长调速器寿命。其工作原理是让调速触点控制BG41的基极偏置电流,从而随着电机转速变化调整了BG\(_{41}\)的平均电阻,而BG41与电机转子串联,转速愈快,BG\(_{41}\)内阻愈大,电机转子电流就减小,转速就自动慢下来,这样达到了电机稳速的目的。