在绕制收音机或电子仪器的电源变压器时,如用手工绕制,不但需要熟练的技巧,而且也比较吃力,如用机械传动方法,就需要一套搭挂齿轮和变速装置,其结构复杂,造价较高。
这里介绍的电子平衡自动跟踪排线装置,使用起来很方便,对不同尺寸的骨架及导线线径不需调整计算齿轮的搭配,其结构比较简单,容易制造。
从事绕线工作的人都知道,在平滑的线轴上绕线时,只要导线走行方向控制得适当,导线就会自行排绕。根据这一点,我们把导线的走行方向变化变换成电信号,再去控制跟踪系统,调整导线的走行方向,就能达到自行排绕的目的。这里的电子平衡自动跟综排线装置就是根据这一原理制作的。整个排线控制线路原理见图1,它包括平衡电桥,电压放大,相敏放大,可逆电动机和导线架等。控制部分的机械装置如图2。导线方向变化由一联接在平衡电桥电路内的电位器变换成电信号,经过放大(电压及相敏放大),驱动可逆电动机,以调整导线走向。
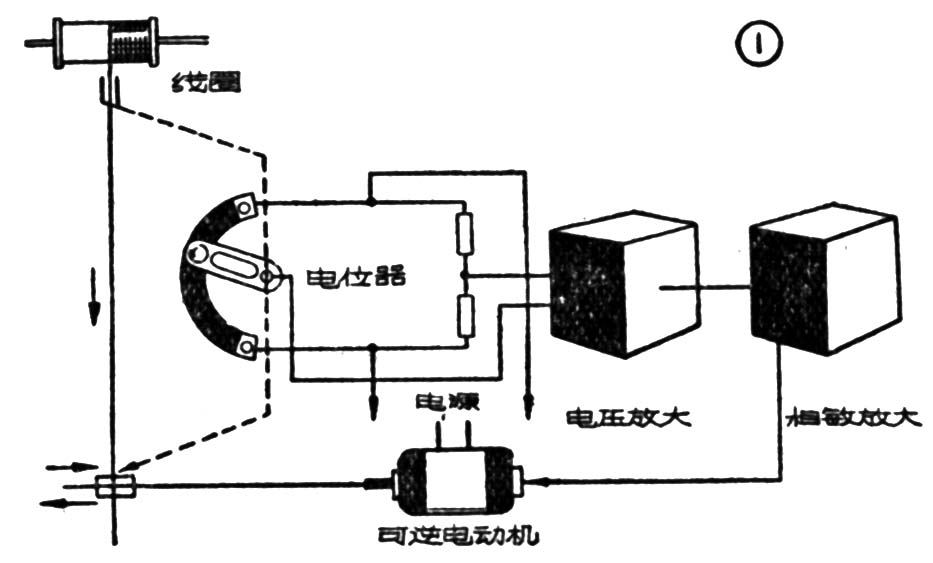
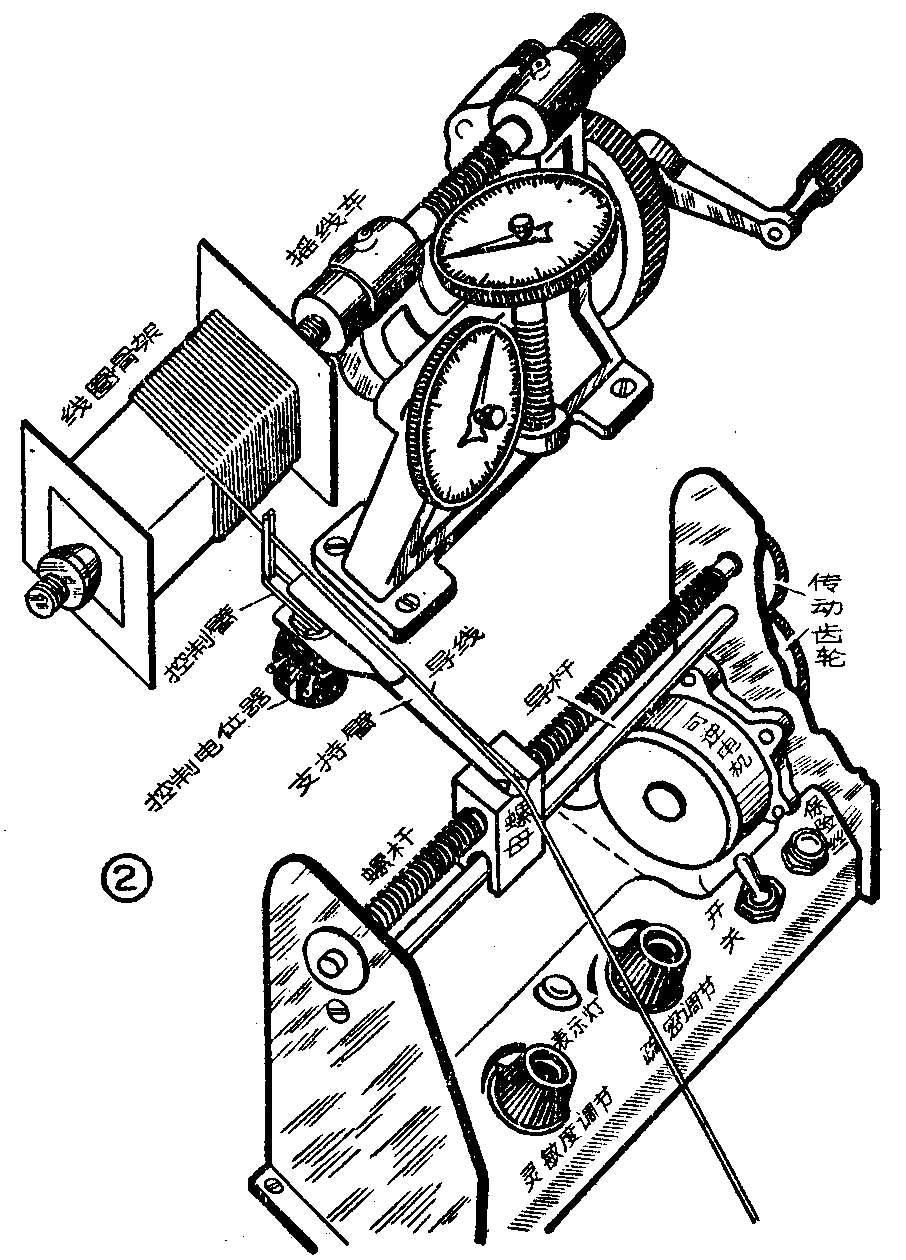
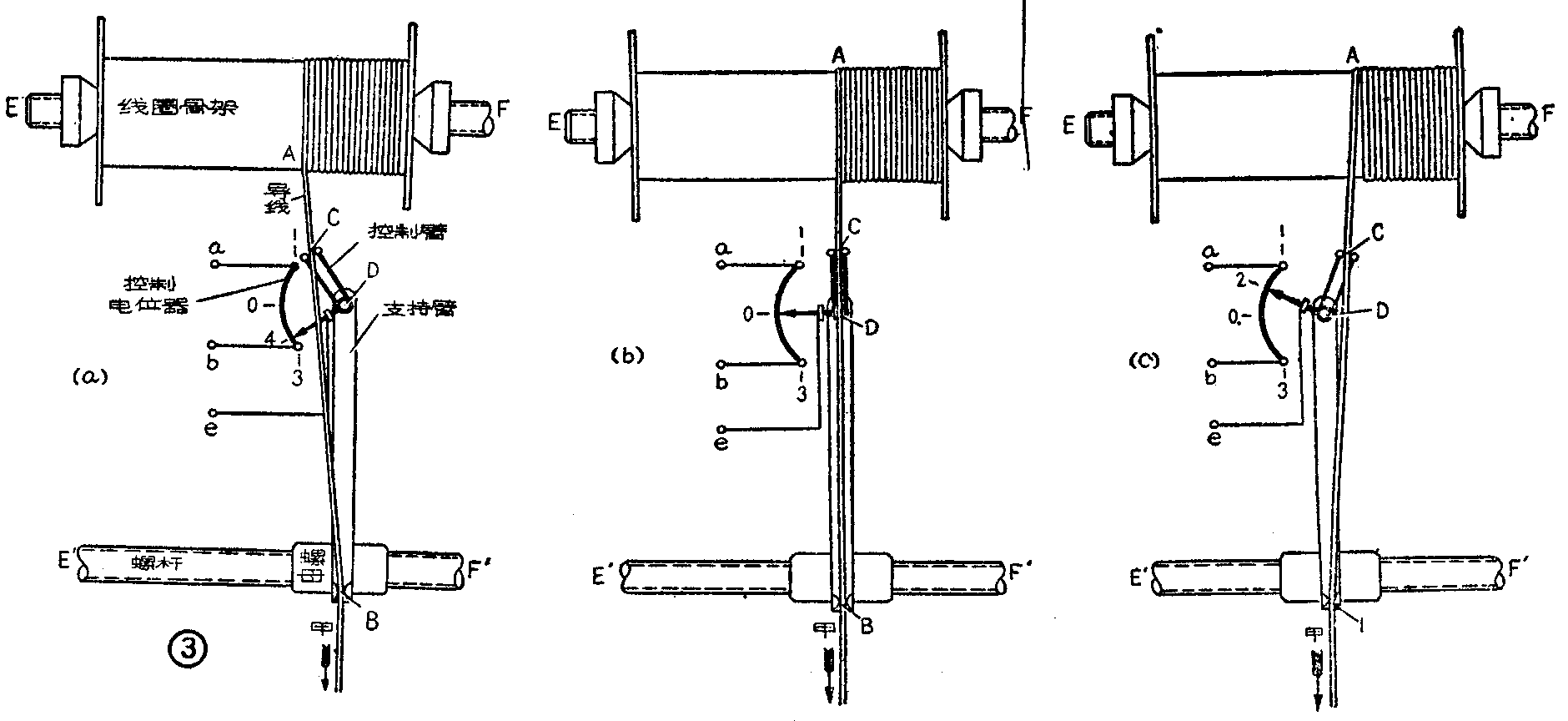
图3是把导线的走向变化变换成电信号的部分工作原理。在图3a中,在甲方向施一个力,使导线AB一段拉成一直线,线圈骨架轴EF平行于排线螺杆轴E'F',支持臂DB垂直于E'F',控制臂CD是活动 的,导线在C点处的两小杆间滑过,C点受导线方向变化的控制而使CD转动。在控制臂的支持臂上装一电位器,电位器的滑动触头与控制臂CD同轴转动,螺母上进线口B控制导线走向。 当导线AB不垂直于EF(E'F')时,控制着CD则不与DB成一直线向一侧偏转而旋动电位器。电位器的滑动触头离开O点(O点为桥路平衡点),滑动触点处于4的位置,桥路失去平衡而输出一电信号给电子管G\(_{1}\)的栅极(控制排线电路见图4),经G1的电压放大和G\(_{2}\)的相敏放大,在可逆电动机的控制线圈1—2中有一50赫的电流,它与激磁线圈3—4中的电流相差90°,使可逆电动机旋转,带动螺杆使螺母向E'方向移动,达到图3b的位置,导线垂直于EF(E'F'),此时控制电位器滑动触头处于O的位置,桥路平衡,桥路平衡后,无信号输入放大器,此时相敏放大器为一全波整流电路,流经可逆电动机控制线圈1—2的电流具有直流分量和100赫的交流分量,与激磁线圈3—4中的电流(50赫)频率不同,不能使电机传动,况且直流分量又有制动作用,所以可逆电机停止转动。当控制电位器的滑动臂处于图3C位置时,电桥失去平衡,输入一信号给电压放大器G1,此时的信号相位与图3a的相差180°,相敏放大器的输出电流流经可逆电动机的控制线圈,其频率为50赫,其相位与图3a的相差180°,使电机转动,但方向相反。可逆电动机带动螺杆旋转使螺母向F'方向移动,达到图3b所示的位置时,可逆电动机停止旋转。因此,螺母始终处于导线AB垂直于EF(E'F')的状态,而达到自动排线的目的。
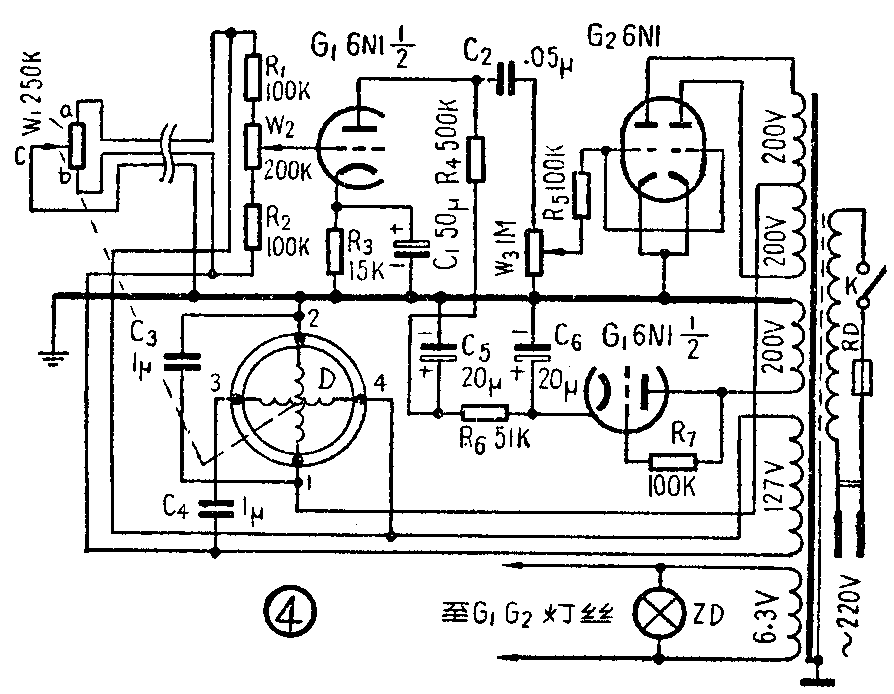
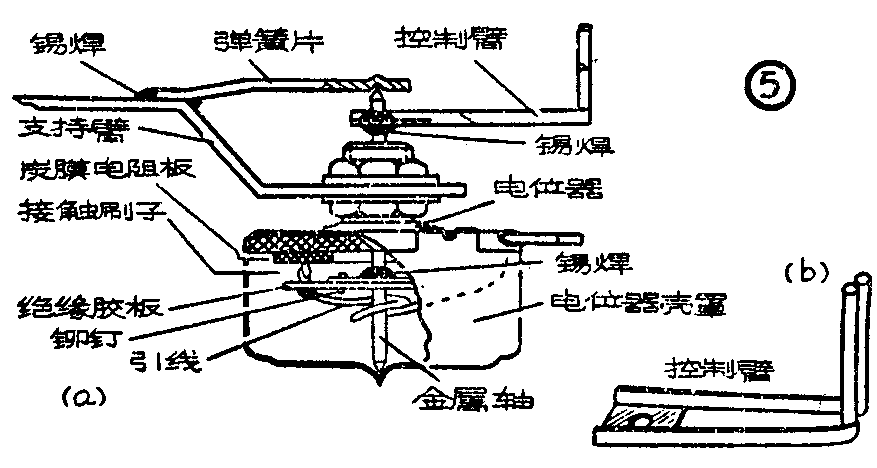
控制电位器W\(_{1}\)是很重要的元件,选用220K的炭膜电位器按照图5的结构改制。对它的要求是接触刷子与炭膜电阻板的接触良好, 接触压力及接触面积尽量小,并且转动灵活。为使电位器转动灵活,应在电位器轴上想办法,我们把转动轴的两端改制成顶针式的,上端与弹簧片接触,下端卧在电位器壳罩的中心,电位器轴与轴套之间摩擦应尽可能的小。这样才能靠导线的作用力来转动电位器。
可逆电动机可以采用上海元昌电机厂生产的电压127伏,功率10瓦的ND型可逆电动机。
螺杆与可逆电动机的转子的转数比力1:2。
螺杆与螺母的配合间隙尽量做得小些,转动灵活些。控制臂CD的长度为支持臂DB的1/5,CD臂的长度为25毫米。
在使用以前,导线拉直,使ADB三点成一直线。触动导线,螺母应有反映,向左或向右移动,如反应迟钝,应调节电位器W\(_{3}\),以提高灵敏度;如螺母摆动不止,亦调节电位器降低灵敏度。
绕线的疏密程度可用电位器W\(_{2}\)来调节。当电位器W2的活动臂调得靠上一些(图4),此时控制电位器W\(_{1}\)处于图3C位置时,电桥才平衡,因而导线和线圈轴不是垂直的,而和导线走向有一角度,如此绕起的线圈,就要疏一些。反之,电位器W2的活动臂调得靠下一些,图3a即为平衡状态,此时绕得的线圈就要密一些。
这种排线装置只适用于分层排绕的情形,不适用于其他绕线方式(如蜂房式等)。(方世敏)