“雷达”(是从外语音译过来的一个名词)又名“无线电定位”,意思是利用无线电波控测目标和测定目标的位置。雷达是在本世纪三十年代产生的,而在大战期间和战后得到实际应用和广泛发展。随着飞机、火箭飞行速度的提高,人造卫星和宇宙飞船上天,对雷达提出了更高的要求,雷达技术跃进到一个新的阶段。本文拟简单介绍雷达的几种体制(关于雷达的基本原理见本刊1965年第6期“雷达是怎样工作的?”一文)。
(一)脉冲雷达 脉冲雷达是发展最早的一种雷达,其基本组成部分可由图1表示。雷达能迅速准确地测量目标(例如飞机、船舰等)的距离。发射机产生的电磁振荡经天线以电波形式向空间辐射。辐射信号是一连串重复的脉冲。电波以每秒三十万公里的速度向一定方向传播,碰到障碍物(目标)时立刻反射,以相同的速度返回雷达,经天线进入接收机,并在指示器上显出(见图2)。测量发射脉冲到反射回波脉冲的延迟时间,就可得到目标的距离。雷达天线能将无线电波聚集成某种形状的波束,向目标照射。天线有转动装置。当天线对准目标时,接收到的回波就强;天线偏离目标时,回波就弱。利用这种天线的方向特性,可测量目标的方位和高低。
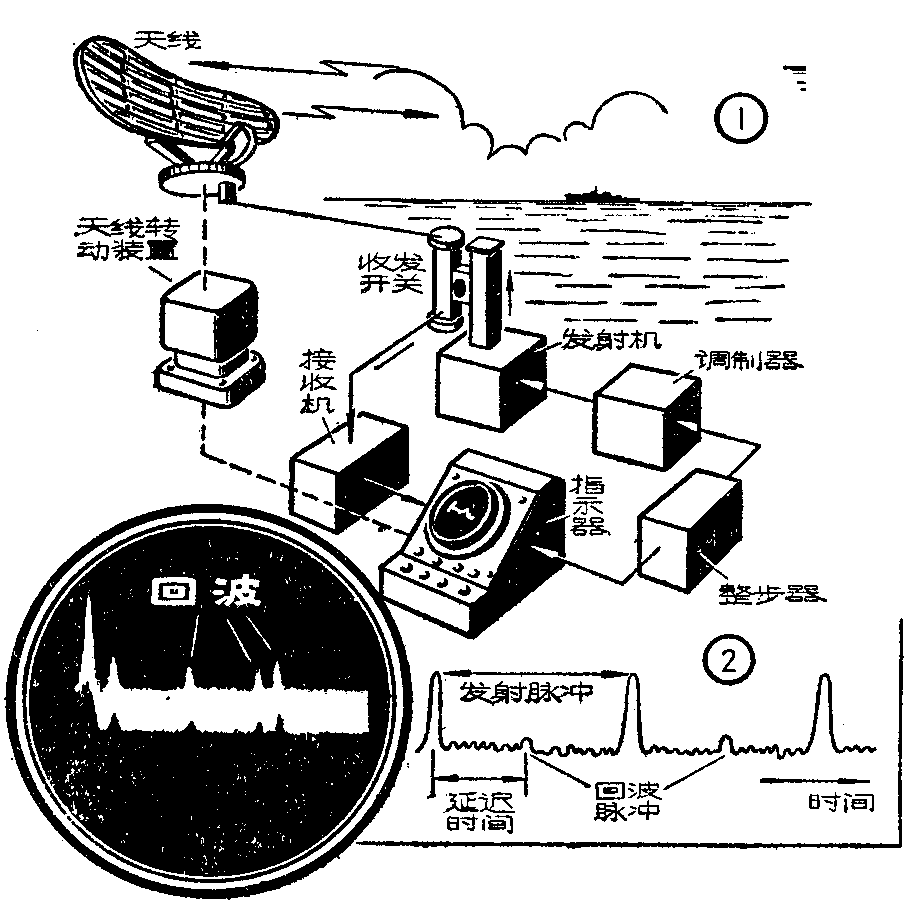
脉冲雷达是基本的雷达形式,目前有广泛应用。
(二)连续波调频雷达 这种雷达发射出的无线电波不是脉冲式的,而是按一定规律改变振荡频率的连续波(调频波)。通常发射信号的频率是按两边相等的锯齿形随时间变化的(见图3)。目标反射回波的信号也是按相同的形式变化的,但是回波信号比发射信号落后了一段时间,这段时间就是电波往返所需的时间。于是,回波信号频率与正在发射的信号频率有一个差值,测量出这频率差值,就可算出目标的距离。
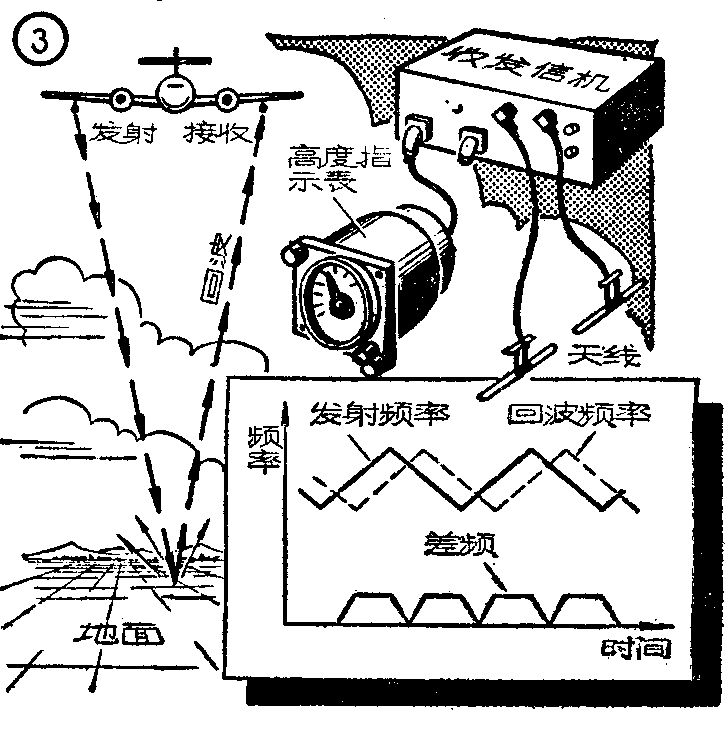
这种雷达结构简单,常装在飞机上测量对地的高度,常称“无线电高度计”。
(三)圆锥扫描雷达 自动跟踪目标的雷达常用圆锥扫描方式。这种雷达发射与接收共用一付波束很窄的天线。天线的波束围绕着天线机械轴不断旋转,速度约每秒30至40转。波束的中心线与天线的机械轴的夹角为波束宽度的一半左右。波束在空间旋转扫描,形成一个圆锥体,故称“圆锥扫描”(如图4)。当天线的机械轴对准目标时,收到的回波脉冲是等幅度的,如图4(1)所示波形。当天线的机械轴偏离目标时,波束的中心线旋转到靠近目标处,收到的回波脉冲幅度大;波束的中心线旋转到偏离目标较远处,收到的回波脉冲幅度小;于是回波脉冲就有幅度变化,如图4(2)所示,称为“角度误差信号”。这信号经过天线控制机构(伺服系统)使天线向目标方向转动,直至天线机械轴对准目标才停止。
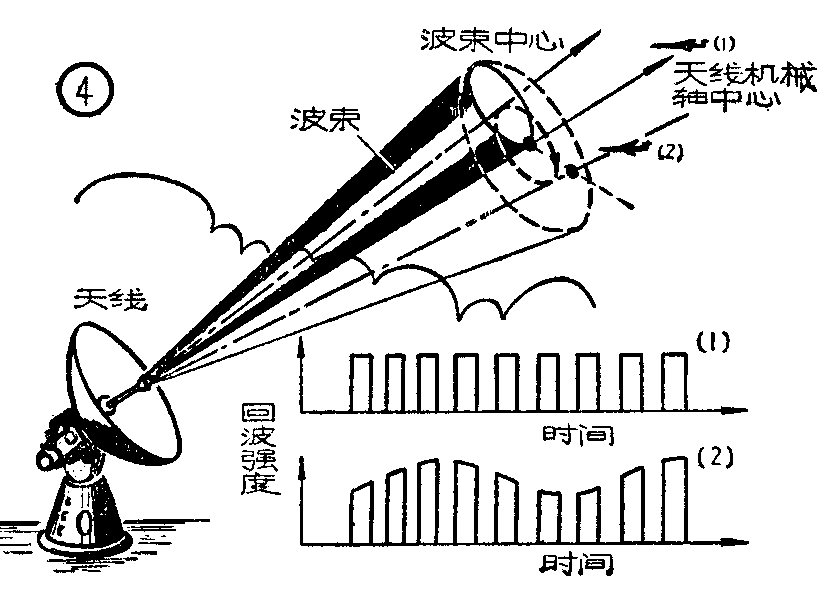
圆锥扫描雷达测量角度的精度高,测量距离同脉冲雷达,结构不太复杂,但抗干扰能力较差。
(四)单脉冲雷达 上述圆锥扫描雷达波束至少要旋转一周(约有几十个回波脉冲)才能测得目标的位置,单脉冲雷达只需一个回波脉冲就可测得目标的位置(包括方位角、高低角和距离),同时能实现自动跟踪目标。单脉冲雷达有振幅比较法、相位比较法与振幅和差法等类型。振幅比较法,是在一个平面上,用两个方向特性图完全相同的天线波束,互相重合一部分(如图5),目标反射的每一个回波均为两个天线波束同时接收。若天线轴偏离目标时,则两个波束所接收的回波幅度大小有差别,称为“角度误差信号”,从它可测得天线轴偏离目标的角度,经过天线控制机构使天线轴向目标方向转动,直到两个天线波束接收到等振幅的回波为止,这时天线轴正对准目标。
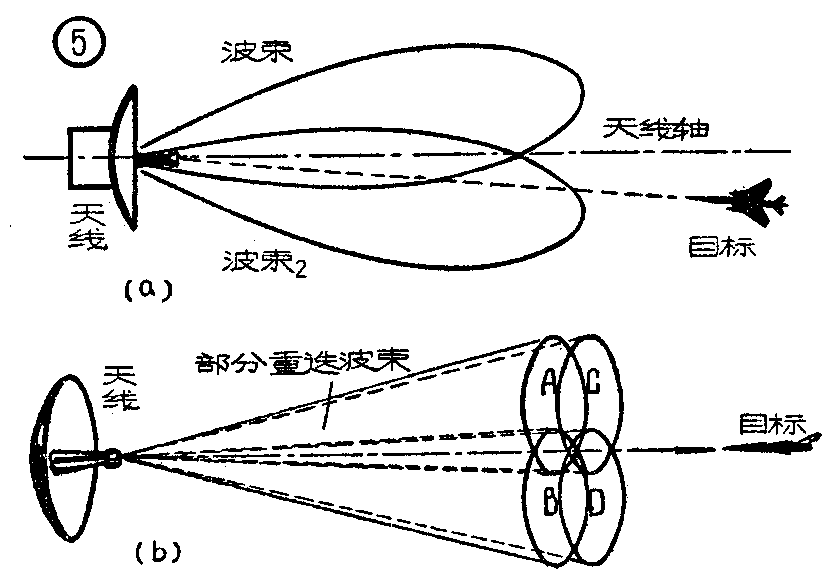
“振幅和差”法的优点较多,现在也用得较多。通常是用一个天线反射面,辐射出在空间部分重叠的A、B、C、D四个固定波束(如图5b)。目标回波同时被四路接收机,接收并对它们的振幅进行加减,(A+B)-(C+D)就得到“方位角误差信号”,(A+C)-(B+D)就得到“高低角误差信号”,(A+B+C+D)就得“和信号”。经过放大之后,利用这三种信号的幅度及相位的关系,通过天线控制机构,可使天线自动跟踪目标。“和信号”与一般脉冲雷达的回波信号一样,可直接用来测量目标距离。
单脉冲雷达的跟踪精度高,能消除目标回波振幅起伏对跟踪精度的影响,抗干扰能力较强。用来跟踪飞机、人造地球卫星及宇宙飞船效果很好。
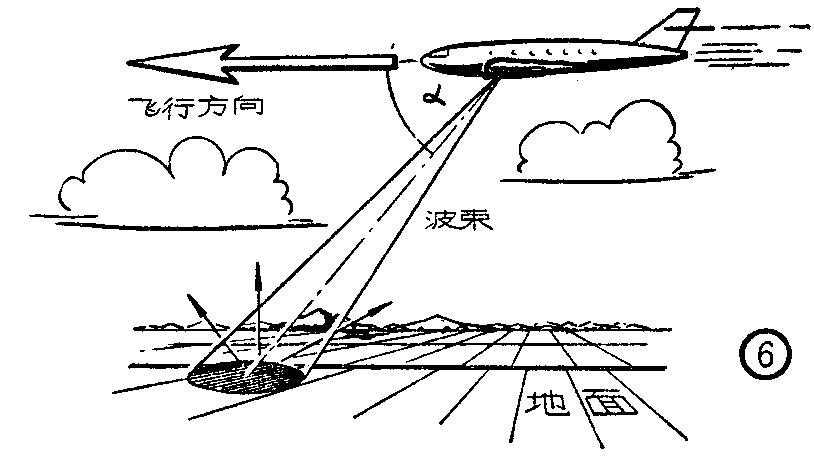
(五)脉冲多普勒雷达 它发射固定频率的无线电波,当运动目标向雷达接近时,目标反射回波的频率就增高;相反,当运动目标与雷达背离时,目标反射回波的频率就减低。这些由于目标运动而增高或减低的频率称为“多普勒频率”。多普勒频率的高低正比于目标相对于雷达的运动速度。固定目标回波的多普勒频率为零。因此在接收机中设法测量出目标回波的多普勒频率,就可区别固定目标和运动目标,测得运动目标的速度。脉冲多普勒雷达善于测速也能测距,常用于测量高速飞行器的速度和用于导航(如图6)。
(六)脉冲压缩雷达 大家知道,增加发射的峰值功率或增加发射脉冲的宽度(持续时间),都能增加发射能量,从而增大雷达的作用距离。但增加峰值功率会受技术限制,增加发射脉冲宽度又会降低距离分辨能力。脉冲压缩雷达是发射机发射出调频范围较宽的宽脉冲,接收机接收到这种宽脉冲回波后,加到一个脉冲压缩网络,使脉冲宽度变得极窄,而使脉冲幅度增大许多倍。经过这种处理后,接收机的输出信号波形就变得极窄而峰值功率增加许多,在指示器上就可看到很强的信号,从而实现了不增加发射机功率,同时达到增大作用距离和提高距离分辨能力。这是一种很好的雷达体制,在远程雷达中已被采用。
(七)三座标雷达 普通作警戒用的脉冲雷达只能测定目标(飞机)的距离和方位角,而得不到目标的高度。三座标雷达能较精确地获得目标的距离、方位角和高低角(或高度)三个数据,常见的有以下几种工作方式:
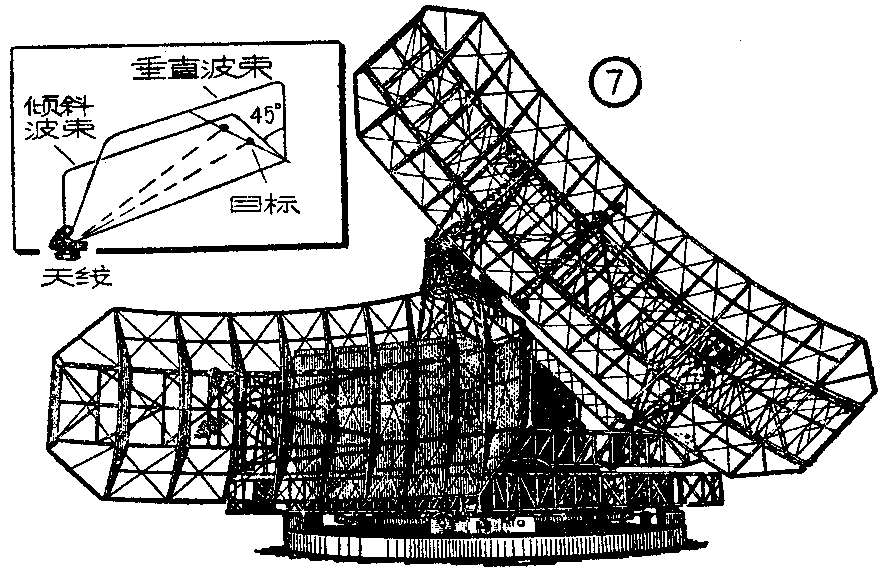
1.V形波束 它的天线由两个扁平波束构成(如图7),一个叫“垂直波束”,其水平面窄而垂直面宽;另一个叫“倾斜波束”,它与垂直波束成45°交角。这两波束构成V字形,故叫“V形波束”。整个天线绕垂直轴转动,垂直波束与倾斜波束先后经过目标,得到两次回波信号,就可算出目标的距离、方位角和高度。
2.水平、垂直波束扫描 天线由两个扁平波束构成,一个垂直波束,其水平面窄而垂直面宽;另一个水平波束,其水平面宽而垂直面窄。整个天线在方位上作机械圆周扫描,同时水平波束作俯仰扫描。综合两个波束所得的回波信号,就获得目标的三个座标。
3.单波束快速扫描 它是利用一个天线在垂直面上不动而使波束作快速“电扫描”,但使天线本体在方位上作机械圆周扫描,获得目标的三个座标。
4.多波束扫描 天线在垂直面上排列满了很多较窄的波束,它们在方位上作机械圆周扫描。这种体制可以采用多个发射机和多路接收,也可以采用单发射机发射和多路接收。一路接收对应一个波束,比较相邻波束的回波振幅,就可以测定目标的高度。
三座标雷达可以获得大量的空间情况,能引导我机拦击敌机,能引导飞机安全航行,在国防上和空中交通管制上起很大作用。
雷达技术日新月异,尚有许多雷达体制,像频率分集雷达、相控阵雷达、多基地雷达、几种体制结合在一起的大型雷达、雷达和电子计算机结合的系统等等,本文没有介绍。(曾邑铎)