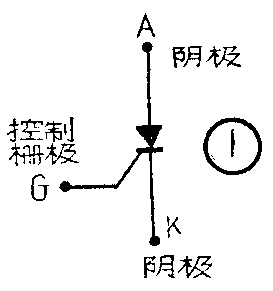
半导体开关管又叫可控硅整流管或固态闸流管,其符号表示见图1所示。若从控制栅极到阴极无电流流过,即使阳极对阴极有较高的电位, 管子仍处于阻塞状态。若有一定的微小电流从控制栅极流到阴极,则管子处于导通状态。这种半导体器件已用作电路的快速开关及可控整流元件。
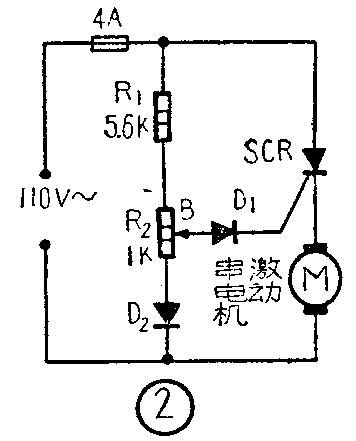
图2是用电位器R\(_{2}\)的滑动臂B来控制串激直流电动机转速的电路。当电源为负半周时, 硅开关管SCR不导电,电动机靠惯性还在旋转,在剩磁的作用下会产生一定的反电动势。在电源为正半周时,如BC两点间的电压大于电枢的反电动势,则有电流从栅极流入,使SCR导通,电动机从电源得到能量, 这一状态直至正半周终了为止。于负半周时,SCR不会导电,电源与电动机没有关系。若将滑动臂B向上移动,使BC两点间的电压占电源电压的百分数增加,导电时刻会提早,电动机获得能量的时间加长,转速就会提高。反之,将滑动臂下移,导电时刻延迟,电动机的转速就变慢。
当滑动臂在较下位置时,电动机在空载条件下起动或负载突然移去,均无飞转的危险。因为电动势被加速到其反电动势大于BC两点间的电压时, SCR不可能导电,不可能再从电源获得能量,于是转速不再上升。由于摩擦作用,转速会逐渐地慢下来,直到反电动势小于BC两点间的电压时,SCR才会再次导电。随着反电动势的变大变小, 转速也在做周期性的变化。空载时电动机能达到的最高转速与滑动臂的位置有关。(叶若华编译)