许多年来,在大地测量中,用殷钢尺来丈量距离,可似把误差限制在百万分之一。但是进行这种测量并不是轻而易举的事情。尤其在山林、沼泽以及沙漠等地区则更困难。即使在平地,它也是一件十分耗费人力和物力的工作。
为了避免过多的丈量工作,在大地测量中,通常使用三角测量方法,只量测极少数的边长,然后用经纬仪测角来计算距离,但这种方法仍相当繁复,并且误差很大。因此,很久以来,测量工作者就希望有新的测距方法来代替丈量,以提高测距工作的质量和效率。随着无线电电子学的发展,这一问题已由光电测距仪和其它无线电测距仪的应用,得到了较好的解决。
无线电精密测距仪有两种主要类型;一种是用高频调制的光束测距;另一种是用高频调制的微波测距。前者称为“光电测距仪”,后者称为“微波测距仪”。它们在基本原理上有相似之处,都是测定高频调制波的相位差,然后根据光速和调制波的频率来确定距离。由于光波和微波在产生、调制、接收以及传播等方面都存在着质的差异,所以在具体结构上,其差别甚大。在本文中,我们仅介绍光电测距技术。
在精密光电测距技术中,是通过测量相位差来间接测量电磁波的传播时间的。在雷达技术中,采用脉冲调制法(脉冲雷达),直接测量发射脉冲和回射脉冲之间的时间间隔来确定距离。由于脉冲本身有一定的宽度和建立时间,在测量时间的精度上和最小可测时间上,都有一定的限制(例如,1微秒宽的脉冲,只能测大于150米的距离。如距离小于150米,回波脉冲将与发射脉冲重叠,从而无法测量)。而在测相法中,测量的直接对象是相位差,大数可以根据调制波长数,准确无误地计算出来,细数可以从相位差计算出来,因而其误差只占调制周期的一个极小的百分比(误差小于千分之一),因而,测相法要比脉冲法准确得多。
光电测距原理
光电测距仪是用高频调制光来工作的,由于光的波长比射频波要短得多,用不太复杂的光学系统,就能把光束定向地投向目标。另外,由于光是直线传播的,真空光速又是一个常量,在大气中,两点间的传播时间与所经过的距离有一确定的关系,因此从传播时间就能算出距离来。
图1是光电测距仪的示意图。光源发出的光,经过透镜1,被聚到电光调制器的中心。在电光调制器上,加有高频发生器送来的高频电压。在电压作用下,通过电光调制器的光束的亮度,被高频电压所调制。透镜2把光束变为平行光射向远方测点的反射镜上。由反射镜回射的光进入接收透镜3,聚焦在光电接收器(光电倍增管)上。在这里,已调制光被还原成电信号,同时得到很高的放大,然后再进入测相装置(相位检波器)。图2是光电测距仪的外形图。
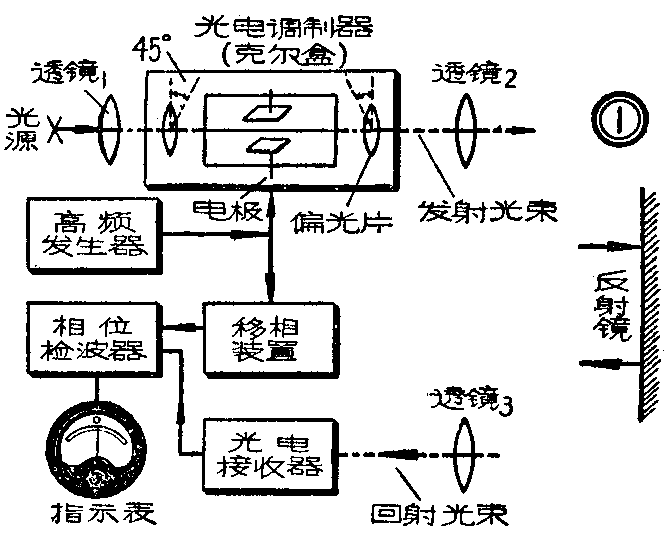
我们知道,光束射到反射镜,再回射到原测点要经过一个的距离(测量距离的两倍)和一段时间。反射回来的光的调制波就比同一瞬间高频发生器输出电压落后一个相位。这一相位差与光的传播距离有关,测出相位差就能定出距离。测试相位差的设备称为相位检波器。在这一装置上,同时加入两路信号:一路是反射回来的信号,另一路是高频发生器经由移相器传来的信号(常称为参考信号)。在相位检波电路中,只有当两信号的相位差是90°时,输出指示才为零。实际上,无论二信号的相位相差多少,总可以调节移相器,使两信号的相位满足这一关系。我们从移相器的读数,就可以知道反射信号的相位滞后于发射波多少。
如果只用一个频率,是不能单值确定距离的。因为当反射镜沿测量线移动半个调制波长时,光就多走或少走一个波长,相应的相位就变化了360°,相位差和原来一样。依此类推,凡是相距半波长整数倍的测点,所测得的相位差都一样,因此,只用一个频率结果所得到的结果是多值的。这与用一把尺去量长度,若我们不能随时说下该长度内有几个整尺,而只知道剩下不足一尺的余长一样。要定出这一段的长度究竟包含几个整尺,可以用几把单位长度不同的尺去测量,而得到不同的余长。根据这些不同余长数据,利用试算法就能算出真实长度。在光电测距中,尺的长度就相当于半波长,采用几个不同的工作波长(单位长度不同的尺),就可以单值地定出距离来。可见,测相法直接测量的,是不足半波长的余长,间接地用多频法,精确无误地定出不同频率的半波长的整数倍数目。这样就使得测量误差能非常之小。例如,通常光电测距仪使用10~30兆赫的调制频率,相应的调制波长为10~30米,测相误差约为1~2厘米,如测量20公里的距离,这一误差就显得很小了。
光调制与测相技术
电光调制器有许多种,其中有机械的、超声波的,电——光效应的、等等。这里只介绍利用电——光效应的,最通用的克尔盒调制器。它是利用电场能影响电磁波偏振的原理,用高频电场(调制波)来改变电磁波(光波)的偏振角。克尔盒对光束的透过率和光的偏振角有关系,也就是和加在它上面的电压有关系。它相当于一个电光闸,在电压由零逐渐增大时,光的透过率也增加,增加到一定程度以后,再增加电压就会使透过的光强减弱。一般使用时调制电压约为1000伏。
相位测量是测距技术中的重要问题。在这方面,可以采用无线电技术中的相位检波器。相位检波器的两个输入信号有一定相位差时,就输出一定极性和大小的电压。
不用移相器而直接从相位检波器输出电压也能读取相位差,但误差比较大。因此,在测距仪中,多用“相位补偿法”,通过调整移相位,调节本地信号的相差,使之与反射信号的相位相差90°,从而使相位检波器的输出为零,然后读取移相器的指示数,算出反射波的相位滞后数据。这种作法要比直接从相位检波器读取相位差准确得多。
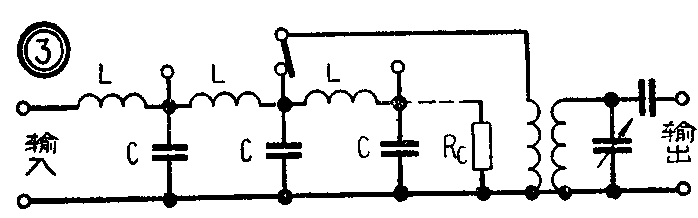
高频移相器可以采用电阻-电容式的,也可以采用集总参数的延迟线,后者的损耗较小,其电路如图3。延迟线电路,在形式上很像低通滤波器,它是由电感、电容组成的多级π形电路。在延迟线的终端接有匹配负载,使输入信号在终端没有反射,形成纯粹的行波。在延迟线之后,接有谐振耦合回路,改变电容量就可以使输出信号的相位作微量改变。利用这两种电路就能获得所需的任何相移。
在光电测距的误差中,包括来源不同的两部分:一部分是由于相位差测得不准而产生的,称为“测相误差”,它和电路的方案,信号噪音比有关,而与量测距离波有关系;另一部分是与距离成比例的误差,叫做“波长误差”,来源于调制频率不稳定,气象改正不能做到十分正确,以及光速真值不准确等因素,其中尤以气象因素的影响为最大,这是因为光束在两测点间传播中途的温度和压力是很难测定的,通常只能测出两测点处的气象数据。大气光速与这些外界条件的数值有关系,因而使测量结果中包含误差。尽管这样,光电测距的精度仍然是很高的,以较好的仪器来说,测相误差约为1厘米,波长误美为测距的2×10\(^{-}\)6。
测距精密度与频率的准确度有直接关系,因而,在测距仪中,采用恒温石英晶体振荡器,其稳定度约为1×10\(^{-}\)7,这对测距技术来说,已经足够了。
光电测距技术虽然给大地测量工作,带来了很大的方便,但也还有一些需要进一步研究的问题,首先是,由于杂光影响,白天观测的距离,还只能达到5~6公里(夜间可达25公里),按照作业要求,最好能达到25公里以上。其次是小型化问题,目前仪器本身的重量虽然可以小到20公斤以下,但它需要用发电机或蓄电池组来供电,而电源的重量仍嫌很大。此外,克尔盒还不是很理想的调制器,它消耗的功率大约为5瓦,看来似乎不大,但这一功率须由电子管产生,而电子管的电源功率,大约要100瓦以上 (这一点当然可以用半导体电路来克服)。它还有一个缺点,就是光的损失较大,这对干白天测距十分不利,因为它降低了信号光对杂散光的比值,这也是需要解决的一个问题。(汝会)